You might also like
- TempDocument2 pagesTempNur AlamNo ratings yet
- Reduced MechDocument3 pagesReduced MechNur AlamNo ratings yet
- Research Grants Council: Hong Kong PHD Fellowship Scheme 2017/18 Explanatory Notes To ApplicantsDocument4 pagesResearch Grants Council: Hong Kong PHD Fellowship Scheme 2017/18 Explanatory Notes To ApplicantsTobi AkinyemiNo ratings yet
- Sandiego20161214 mechCKDocument1 pageSandiego20161214 mechCKNur AlamNo ratings yet
- Train TicketingDocument4 pagesTrain TicketingsorowareNo ratings yet
- Rotating CylinderDocument116 pagesRotating CylinderNur AlamNo ratings yet
- Objective:: Common Features of Water Level Control DevicesDocument6 pagesObjective:: Common Features of Water Level Control DevicesNur AlamNo ratings yet
- New Text DocumentDocument1 pageNew Text DocumentNur AlamNo ratings yet
- Statics SolutionDocument315 pagesStatics SolutionNur AlamNo ratings yet
- The Spiral-Channel Viscous Micropump: A.T. Al-Halhouli, M. I. Kilani, A. Al-Salaymeh, and S. BüttgenbachDocument10 pagesThe Spiral-Channel Viscous Micropump: A.T. Al-Halhouli, M. I. Kilani, A. Al-Salaymeh, and S. BüttgenbachNur AlamNo ratings yet
- 889Document25 pages889hamed12077No ratings yet
- Heattransfer - : Md. Nur Alam MondalDocument13 pagesHeattransfer - : Md. Nur Alam MondalNur AlamNo ratings yet
- NanoDocument4 pagesNanoNur AlamNo ratings yet
- HstuDocument1 pageHstuNur AlamNo ratings yet
- Study of Sources of Energy: Conventional and Renewable, Environmental PollutionDocument14 pagesStudy of Sources of Energy: Conventional and Renewable, Environmental PollutionNur AlamNo ratings yet
- Pad Eye, Solidwork - TutorialDocument28 pagesPad Eye, Solidwork - TutorialJogi Oscar SinagaNo ratings yet
- SyllabusDocument31 pagesSyllabusFAzle RAbbyNo ratings yet
- ASME - PTC4.1 .Boiler Efficiency TestDocument29 pagesASME - PTC4.1 .Boiler Efficiency TestBC Harish92% (13)
- Intro Class LecDocument3 pagesIntro Class LecNur AlamNo ratings yet
- drwing-IIT Que-2 PDFDocument16 pagesdrwing-IIT Que-2 PDFNur AlamNo ratings yet
- Course Title: Engineering Mechanics I Course Code: MEE 105Document1 pageCourse Title: Engineering Mechanics I Course Code: MEE 105Nur AlamNo ratings yet
- Shiangyu Lin ThesisDocument60 pagesShiangyu Lin ThesisNur AlamNo ratings yet
- Bme 3FDocument4 pagesBme 3FNur AlamNo ratings yet
- drwing-IIT Que-1 PDFDocument14 pagesdrwing-IIT Que-1 PDFNur Alam100% (1)
- 1 s2.0 S1026309811002288 MainDocument6 pages1 s2.0 S1026309811002288 MainNur AlamNo ratings yet
- Shiangyu Lin ThesisDocument60 pagesShiangyu Lin ThesisNur AlamNo ratings yet
- Laser Review of Micro Pumps in JMMDocument30 pagesLaser Review of Micro Pumps in JMMmitulgpatelNo ratings yet
- Bme 3FDocument4 pagesBme 3FNur AlamNo ratings yet
- Industrial Training 2016 - Instructions For Preparing PPT PresentationDocument1 pageIndustrial Training 2016 - Instructions For Preparing PPT PresentationNur AlamNo ratings yet
- CV for Teaching Assistant PositionDocument5 pagesCV for Teaching Assistant PositionNur AlamNo ratings yet
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (890)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (587)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (399)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (73)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (265)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2219)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (119)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- Chapter 1-Electric FieldDocument33 pagesChapter 1-Electric FieldThông LêNo ratings yet
- A Synopsis of The Discoveries of John W. Keely - Jerry DeckerDocument3 pagesA Synopsis of The Discoveries of John W. Keely - Jerry DeckerGregg Martin100% (1)
- Control of Mobile Robots: Glue Lectures: InstructorDocument28 pagesControl of Mobile Robots: Glue Lectures: Instructoryashar2500No ratings yet
- Physics Internal AssessmentDocument14 pagesPhysics Internal AssessmentRachitNo ratings yet
- MSTE 2 - Part 1Document2 pagesMSTE 2 - Part 1aisen agustinNo ratings yet
- EntropyDocument48 pagesEntropyMyra Joy B MonteroNo ratings yet
- Operation Sandstone. Nuclear Explosions 1948, Scientific Director's Report of Atomic Weapon TestsDocument341 pagesOperation Sandstone. Nuclear Explosions 1948, Scientific Director's Report of Atomic Weapon TestsMikeF88No ratings yet
- Ebook Chemistry An Atoms First Approach 2Nd Edition Zumdahl Solutions Manual Full Chapter PDFDocument62 pagesEbook Chemistry An Atoms First Approach 2Nd Edition Zumdahl Solutions Manual Full Chapter PDFthuygladys5x0100% (12)
- MIT22 312F15 Note L4Document65 pagesMIT22 312F15 Note L4udaykumar8995No ratings yet
- Shell Element Forces StressesDocument6 pagesShell Element Forces Stressesmacarena menaNo ratings yet
- Density: 1. You Have A Mineral With A Volume of 15 CMDocument2 pagesDensity: 1. You Have A Mineral With A Volume of 15 CMAndrés LondoñoNo ratings yet
- Static Electromagnetic Fields in Matter Chapter 7 SummaryDocument7 pagesStatic Electromagnetic Fields in Matter Chapter 7 Summaryekosatria0040% (1)
- Fluid Description of PlasmaDocument10 pagesFluid Description of PlasmaDaniel HikaNo ratings yet
- Concrete Electrical ResistivityDocument7 pagesConcrete Electrical Resistivitysoulmateforeverforu100% (1)
- WCOG Paper4 MCQ QuestionsDocument43 pagesWCOG Paper4 MCQ QuestionsRupaliNo ratings yet
- GP 1 Module 4Document91 pagesGP 1 Module 4Raymund EspinoNo ratings yet
- An Improved Quadrilateral Flat Element With Drilling Degrees of Freedom For Shell Structural AnalysisDocument35 pagesAn Improved Quadrilateral Flat Element With Drilling Degrees of Freedom For Shell Structural AnalysisDaniele Di LucaNo ratings yet
- ECH148 UC DavisDocument5 pagesECH148 UC DavisKaul PatrickNo ratings yet
- S - Kuliah04 - 2 MARCH - FORCE IN 3DDocument23 pagesS - Kuliah04 - 2 MARCH - FORCE IN 3DFahmi FauziNo ratings yet
- Ec2305 Transmission Lines & Wave Guides Question BankDocument6 pagesEc2305 Transmission Lines & Wave Guides Question BankharvishNo ratings yet
- Hydrodynamics of Foaming Systems in Packed TowersDocument9 pagesHydrodynamics of Foaming Systems in Packed TowersdoufethiNo ratings yet
- Problems CH 2Document7 pagesProblems CH 2Oec EngNo ratings yet
- Heiser - Temperature Charts For Induction and Constant Temperature HeatingDocument10 pagesHeiser - Temperature Charts For Induction and Constant Temperature Heatingsharkdude1134No ratings yet
- Vector Algebra: Unit IvDocument95 pagesVector Algebra: Unit IvTharindu PrabhathNo ratings yet
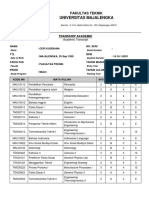
- TRANSCRIPTDocument3 pagesTRANSCRIPTCepi KusdianaNo ratings yet
- 44-4345CAT SensorsAndEmittersInfraredSensingDocument48 pages44-4345CAT SensorsAndEmittersInfraredSensingwowbagger02No ratings yet
- Wolfram Models For Physics PDFDocument448 pagesWolfram Models For Physics PDFjcNo ratings yet
- Physics Project On ThermoelectricityDocument10 pagesPhysics Project On ThermoelectricityAbdul SamiNo ratings yet
- 4th-Qrtr-dll Gr.-9Document29 pages4th-Qrtr-dll Gr.-9harold carbonelNo ratings yet
- Effects of solution heat treatment on microstructure and mechanical properties of AZ61-0.7Si magnesium alloyDocument5 pagesEffects of solution heat treatment on microstructure and mechanical properties of AZ61-0.7Si magnesium alloysujit_sekharNo ratings yet