You might also like
- Raspberry Pi For Beginners: How to get the most out of your raspberry pi, including raspberry pi basics, tips and tricks, raspberry pi projects, and more!From EverandRaspberry Pi For Beginners: How to get the most out of your raspberry pi, including raspberry pi basics, tips and tricks, raspberry pi projects, and more!No ratings yet
- The Raspberry Pi Magazine - The MagPi. Issue 19Document44 pagesThe Raspberry Pi Magazine - The MagPi. Issue 19iscrbdi100% (1)
- 10OfTheBestRaspberryPiZeroProjectsSoFar PDFDocument10 pages10OfTheBestRaspberryPiZeroProjectsSoFar PDFMr JasNo ratings yet
- Amiga 500 User's ManualDocument300 pagesAmiga 500 User's Manualremow100% (7)
- Autopilot Nautopilot Np60Document4 pagesAutopilot Nautopilot Np60yogaNo ratings yet
- EXPERIMENT 16-Pressure ControlDocument21 pagesEXPERIMENT 16-Pressure ControlQeseraReaNo ratings yet
- The Raspberry Pi Magazine - The MagPi. Issue 17Document40 pagesThe Raspberry Pi Magazine - The MagPi. Issue 17iscrbdi100% (2)
- Process Control and Data Acquisition System2Document56 pagesProcess Control and Data Acquisition System2Alejandro BilingonNo ratings yet
- RasPi Issue 6 - 2014 UK (Repost)Document68 pagesRasPi Issue 6 - 2014 UK (Repost)Elena Paulina Alecu100% (1)
- Introducing The Raspberry Pi ZeroDocument40 pagesIntroducing The Raspberry Pi ZeroMufaddal AzadNo ratings yet
- Raspberry Pi Pico STEAM Robot BuildDocument25 pagesRaspberry Pi Pico STEAM Robot BuildVictor EckerdtNo ratings yet
- Wolf: Iot Multi-Terrain Quadruped: by HuskyroboDocument50 pagesWolf: Iot Multi-Terrain Quadruped: by HuskyroboAniket KaushikNo ratings yet
- CameraShyHoodie InstructionsDocument26 pagesCameraShyHoodie InstructionsManuel PintaNo ratings yet
- Camara FomakoDocument37 pagesCamara FomakoEkmeg KwongNo ratings yet
- Introducing The Raspberry Pi Zero: Created by Lady AdaDocument36 pagesIntroducing The Raspberry Pi Zero: Created by Lady AdaArif Heru SanjayaNo ratings yet
- FI8910W User Manual FinalDocument50 pagesFI8910W User Manual FinalkuomattNo ratings yet
- Speech & Web Controlled Surveillance Spider RobotDocument15 pagesSpeech & Web Controlled Surveillance Spider RobotGCNo ratings yet
- Line Following Zumo Robot Programmed With SimulinkDocument19 pagesLine Following Zumo Robot Programmed With SimulinkNiravNo ratings yet
- TutorialDocument17 pagesTutorialericsylvestre80No ratings yet
- Diy Wifi Raspberry Pi Touch CamDocument14 pagesDiy Wifi Raspberry Pi Touch CamPakar BacaNo ratings yet
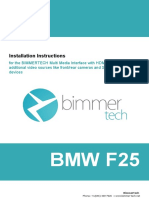
- BMW F25: Installation InstructionsDocument26 pagesBMW F25: Installation InstructionsAlNo ratings yet
- Ttl-Serial-Camera para Arduino PDFDocument29 pagesTtl-Serial-Camera para Arduino PDFCésar Carrión AguirreNo ratings yet
- Pip-Boy 2040 Wrist-Mounted Prop: Created by John ParkDocument31 pagesPip-Boy 2040 Wrist-Mounted Prop: Created by John ParkMervin HernandezNo ratings yet
- How To Make 3D Printed LaptopDocument11 pagesHow To Make 3D Printed LaptopHamza Sadaqa100% (1)
- DIY ESP32 Camera Motor Shield Wifi Camera Robot CarDocument22 pagesDIY ESP32 Camera Motor Shield Wifi Camera Robot CarCarlos DiazNo ratings yet
- Raspberry Pi Camera User ManualDocument3 pagesRaspberry Pi Camera User ManualLauraNo ratings yet
- FindMyCat The Open Source Pet TrackerDocument23 pagesFindMyCat The Open Source Pet TrackerMihaiNo ratings yet
- Icam 4000Document10 pagesIcam 4000Mircea FrantNo ratings yet
- Making A Mini Monitor For Raspberry PiDocument44 pagesMaking A Mini Monitor For Raspberry PiRamji PatelNo ratings yet
- OSOYOO V2.1 Robot Car Kit Lesson 4 - Tracking Line Robot CarDocument8 pagesOSOYOO V2.1 Robot Car Kit Lesson 4 - Tracking Line Robot Cargeloandima1No ratings yet
- IP Camera Nc800 ManualDocument26 pagesIP Camera Nc800 ManualCarlos Vieites100% (1)
- TTL Serial CameraDocument25 pagesTTL Serial CameraJoseph Quezada Fellizar100% (1)
- CBC User Manual PDFDocument44 pagesCBC User Manual PDFNacho CansecoNo ratings yet
- Camera NanoTankDocument8 pagesCamera NanoTankjuan martinezNo ratings yet
- Rideable Segway Clone - Low Cost and Easy Build: Digital MPU6050 Accelerometer/gyro IMU BoardDocument45 pagesRideable Segway Clone - Low Cost and Easy Build: Digital MPU6050 Accelerometer/gyro IMU BoardpaolaNo ratings yet
- Introducing The Raspberry Pi ZeroDocument34 pagesIntroducing The Raspberry Pi ZeroJohn DoeNo ratings yet
- Installation of IPROBOT3: InhaltDocument27 pagesInstallation of IPROBOT3: InhaltjamodurNo ratings yet
- Ricoh WG 4Document253 pagesRicoh WG 4SURFnskNo ratings yet
- Raspberry Pi Face Recognition Treasure BoxDocument21 pagesRaspberry Pi Face Recognition Treasure BoxpikachobsNo ratings yet
- GVP Impact Series II A500 HD Users GuideDocument28 pagesGVP Impact Series II A500 HD Users GuideDaniel Hosaka SamwaysNo ratings yet
- 10 Great Pico Projects for BeginnersDocument66 pages10 Great Pico Projects for Beginnersnop samNo ratings yet
- Fidget Spinning RobotDocument8 pagesFidget Spinning RobotJhonny Roy Salomon DonayreNo ratings yet
- Getting Started: Raspberry Pi High Quality CameraDocument7 pagesGetting Started: Raspberry Pi High Quality CameraquxNo ratings yet
- Car Raspberry Pi3 Dash Cam - 7 Steps (With Pictures) - InstructablesDocument21 pagesCar Raspberry Pi3 Dash Cam - 7 Steps (With Pictures) - InstructablesJesse KazemekNo ratings yet
- Jingfeng LiuDocument72 pagesJingfeng LiulcvalmeidaNo ratings yet
- Darwin Mini ManualDocument39 pagesDarwin Mini ManualMuhammad RenaldyNo ratings yet
- Build your own flexible DIY surveillance systemDocument41 pagesBuild your own flexible DIY surveillance systemamacmanNo ratings yet
- DETERMINE PATH INTO HOME CAMERASDocument2 pagesDETERMINE PATH INTO HOME CAMERASrelu c.No ratings yet
- LP-I IoTES Assignment No 3Document5 pagesLP-I IoTES Assignment No 3Merlin StringsNo ratings yet
- Control Robotic Arm with Android AppDocument9 pagesControl Robotic Arm with Android AppZied SanaaNo ratings yet
- Front Camera Install On 2017 Grand Cherokee SummitDocument12 pagesFront Camera Install On 2017 Grand Cherokee SummitaliinhauseNo ratings yet
- TTL Serial Camera 2Document28 pagesTTL Serial Camera 2ConejoSinPompon gomaNo ratings yet
- Manual K-30 EN PDFDocument295 pagesManual K-30 EN PDFStamatis PapadopoulosNo ratings yet
- Playing Sounds and Using Buttons With Raspberry PiDocument10 pagesPlaying Sounds and Using Buttons With Raspberry PiMariano AmorNo ratings yet
- Operating Manual: SLR Digital CameraDocument300 pagesOperating Manual: SLR Digital CameraMohammed ShabanNo ratings yet
- Touch ScreenDocument36 pagesTouch ScreenThomas PravinrajNo ratings yet
- Key Chain Spy Camera Video 808 26 ModifiedDocument22 pagesKey Chain Spy Camera Video 808 26 ModifiedtrialqwNo ratings yet
- Build Your Own Low-cost Augmented Reality Eyeglass with Thermal VisionDocument8 pagesBuild Your Own Low-cost Augmented Reality Eyeglass with Thermal VisionVvOoDdNo ratings yet
- Holybro Kopis2 6S ManualDocument43 pagesHolybro Kopis2 6S ManualMarek BalcerekNo ratings yet
- Pix4Team User ManualDocument19 pagesPix4Team User ManualSomeoneInAusTXNo ratings yet
- Mkii User Manual PDFDocument60 pagesMkii User Manual PDFGaston MartinezNo ratings yet
- Sailor 6300 MF/HF: More Than GMDSS New ConnectionsDocument4 pagesSailor 6300 MF/HF: More Than GMDSS New ConnectionsGaston MartinezNo ratings yet
- Serial Ata Flash Drive: Rohs CompliantDocument20 pagesSerial Ata Flash Drive: Rohs CompliantGaston MartinezNo ratings yet
- Mkii User Manual PDFDocument60 pagesMkii User Manual PDFGaston MartinezNo ratings yet
- Instruction Manual: VHF Marine TransceiverDocument64 pagesInstruction Manual: VHF Marine TransceiverGaston MartinezNo ratings yet
- Rugged industrial SSDs with 3D NANDDocument2 pagesRugged industrial SSDs with 3D NANDGaston MartinezNo ratings yet
- JHS-182 Brochure PDFDocument4 pagesJHS-182 Brochure PDFGaston MartinezNo ratings yet
- Shimaden SR1 8Y 1WDocument8 pagesShimaden SR1 8Y 1WmaufisanNo ratings yet
- Advanced Level Control AlgorithmDocument10 pagesAdvanced Level Control AlgorithmLuthandoNo ratings yet
- 3014all - 7th Semester - Mineral EngineeringDocument62 pages3014all - 7th Semester - Mineral EngineeringadNo ratings yet
- APCMT - shortAnswer-QUESTION BANK - 2020Document4 pagesAPCMT - shortAnswer-QUESTION BANK - 2020devashishNo ratings yet
- Pneumatic Controller FundamentalsDocument46 pagesPneumatic Controller Fundamentalsbaba maachoNo ratings yet
- Feedback Controllers: Figure. Schematic Diagram For A Stirred-Tank Blending SystemDocument24 pagesFeedback Controllers: Figure. Schematic Diagram For A Stirred-Tank Blending SystemRama ChilpuriNo ratings yet
- Process Control Instrumentation Polytechnic Books PDF DownloadDocument92 pagesProcess Control Instrumentation Polytechnic Books PDF DownloadVaibhav ChoudhariNo ratings yet
- Assignment 1 CodeDocument7 pagesAssignment 1 Codeshivakalyan yadavNo ratings yet
- A Control System of DC Motor Speed - Systematic ReviewDocument19 pagesA Control System of DC Motor Speed - Systematic ReviewCanizares1000No ratings yet
- CH4-Trans Resp PDFDocument53 pagesCH4-Trans Resp PDFLove StrikeNo ratings yet
- 11 1 Dynamic Closed LoopDocument34 pages11 1 Dynamic Closed LoopShilpya KurniasihNo ratings yet
- Week 10-Feedback ControlDocument34 pagesWeek 10-Feedback ControlMohd Aizad100% (1)
- LAPSE DOMAIN SOLUTIONSDocument24 pagesLAPSE DOMAIN SOLUTIONSscribideNo ratings yet
- Controlador Temperatura TC3YTDocument6 pagesControlador Temperatura TC3YTLuiz Mauro XavierNo ratings yet
- Simulation and Performance of Liquid Level Controllers For Linear TankDocument9 pagesSimulation and Performance of Liquid Level Controllers For Linear TankFerry DewantoNo ratings yet
- Labsheet Liquid Level and Flow SystemDocument22 pagesLabsheet Liquid Level and Flow SystemNazif MisnanNo ratings yet
- Hanyoung HY-2000Document2 pagesHanyoung HY-2000QAD ImedcoNo ratings yet
- Developments in Plastics Technology-1 - Extrusion (PDFDrive) PDFDocument292 pagesDevelopments in Plastics Technology-1 - Extrusion (PDFDrive) PDFzuhrotun urfiyahNo ratings yet
- Chapter 5 CS DesignDocument42 pagesChapter 5 CS DesignSiferaw NegashNo ratings yet
- Auto PilotDocument5 pagesAuto PilotKannanNo ratings yet
- Experiment 06: Study of Process Control-I: Mesbah Ahmad Lecturer Department of Chemical Engineering, BUETDocument18 pagesExperiment 06: Study of Process Control-I: Mesbah Ahmad Lecturer Department of Chemical Engineering, BUETMd Abid AfridiNo ratings yet
- Proportional Control For Water Level in A Tank: Experiment No. 1Document5 pagesProportional Control For Water Level in A Tank: Experiment No. 1Dioselle CastilloNo ratings yet
- Control Lab All Exp and Reports in Single PDF (Abdullah Ibn Mahmud) PDFDocument183 pagesControl Lab All Exp and Reports in Single PDF (Abdullah Ibn Mahmud) PDFShakil Ahmed100% (1)
- Thesis On Vaccine ProductionDocument177 pagesThesis On Vaccine Productionsanjaykumarkadam2289No ratings yet
- 2.2 Dynamics of Feedback Control SystemsDocument42 pages2.2 Dynamics of Feedback Control SystemsJust RobotNo ratings yet
- Pid Basic CodeDocument14 pagesPid Basic Codechandushar1604No ratings yet
- Tuning Workshop PID Controllers: Shell Global SolutionsDocument33 pagesTuning Workshop PID Controllers: Shell Global SolutionsSunil SinghNo ratings yet