You might also like
- CAN Bus - Wikipedia, The Free EncyclopediaDocument16 pagesCAN Bus - Wikipedia, The Free EncyclopediaRakesh S K100% (1)
- Theory: CAN-Bus: 1 General InformationDocument7 pagesTheory: CAN-Bus: 1 General InformationDileep Kumar100% (1)
- CAN Networks Significantly Reduce WiringDocument4 pagesCAN Networks Significantly Reduce Wiringvigneshwaran100% (2)
- Reprogramming and Blank Programming Readme Version 3.7: Revision Date ModificationDocument6 pagesReprogramming and Blank Programming Readme Version 3.7: Revision Date ModificationJose FernandezNo ratings yet
- Aeon NEW SPORTY 125-180 Repair ManualDocument93 pagesAeon NEW SPORTY 125-180 Repair ManualGassmeNo ratings yet
- Central Locking SystemDocument5 pagesCentral Locking SystemSherzad ChemNo ratings yet
- BYPASS Map SENSORDocument3 pagesBYPASS Map SENSORKushal ExpertNo ratings yet
- Kdfi V1.4: User Manual (English)Document13 pagesKdfi V1.4: User Manual (English)Dot3xe Nicolas100% (1)
- CAN HandoutDocument16 pagesCAN HandoutJaffer HussainNo ratings yet
- Illuminated Wrench Light-Diagnostic TSB 13-3-19 Trouble Code (DTC) B1029:11-With or Without Lack of PerformanceDocument2 pagesIlluminated Wrench Light-Diagnostic TSB 13-3-19 Trouble Code (DTC) B1029:11-With or Without Lack of PerformanceEvertonReis100% (1)
- ESP Torque Sensor: Resetting A CorollaDocument1 pageESP Torque Sensor: Resetting A CorolladoudzoNo ratings yet
- Intrusion Detection System Based On The Analysis of Time Intervals of CAN Messages For In-Vehicle NetworkDocument6 pagesIntrusion Detection System Based On The Analysis of Time Intervals of CAN Messages For In-Vehicle NetworkPaulNo ratings yet
- j1850 WP PDFDocument15 pagesj1850 WP PDFMikeNo ratings yet
- Touareg No. 72 / 1: 3.0 l/165 KW TDI, Engine Code BKS 3.0 l/155 KW TDI, Engine Code BUNDocument17 pagesTouareg No. 72 / 1: 3.0 l/165 KW TDI, Engine Code BKS 3.0 l/155 KW TDI, Engine Code BUNG GNo ratings yet
- VW-Audi Airbag Reset Tool User ManualDocument14 pagesVW-Audi Airbag Reset Tool User ManualgermantronikNo ratings yet
- 214 Toyota Lexus 100 Eng PDFDocument4 pages214 Toyota Lexus 100 Eng PDFMarran Almarrani100% (1)
- VW Automatic Transmission: Presentation, Working and Enhancements 1-Driving With A BVADocument37 pagesVW Automatic Transmission: Presentation, Working and Enhancements 1-Driving With A BVAJOHON SANCHEZNo ratings yet
- 12V To 220V 100W InverterDocument2 pages12V To 220V 100W InverterYudi DopiNo ratings yet
- Relay Loc LCR 200Document40 pagesRelay Loc LCR 200Yannick de WalqueNo ratings yet
- CAN Protocol Principles of Data ExchangeDocument4 pagesCAN Protocol Principles of Data Exchangerenju88100% (1)
- 556U Immobolizer InterfaceDocument9 pages556U Immobolizer InterfaceLuis Perez100% (1)
- Service: Audi A6 1998Document222 pagesService: Audi A6 1998Kovács EndreNo ratings yet
- 01-15 Check DTC Memory and Erase DTC Memory PDFDocument52 pages01-15 Check DTC Memory and Erase DTC Memory PDFmefisto06cNo ratings yet
- Immobilizer III Injection Pump Swapping - Ross-Tech WikiDocument2 pagesImmobilizer III Injection Pump Swapping - Ross-Tech WikiIonut PaleocaNo ratings yet
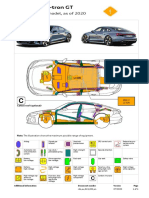
- Audi Rescue Data Sheets (E-Tron GT - Sportback - 2020 - 5d - Electric - EN)Document4 pagesAudi Rescue Data Sheets (E-Tron GT - Sportback - 2020 - 5d - Electric - EN)caragan1970No ratings yet
- 2005 Passat 2.0 TDI - EGR - Boost Pressure IssuesDocument11 pages2005 Passat 2.0 TDI - EGR - Boost Pressure IssuesSàLàh Cràzy LoveNo ratings yet
- Relay DiagramsDocument65 pagesRelay Diagramsstainless31620039126100% (1)
- NGS GettingStarted ENGDocument4 pagesNGS GettingStarted ENGdzzmikeNo ratings yet
- Ford AODDocument10 pagesFord AODMohammed MochrifNo ratings yet
- CAN Mode 6Document12 pagesCAN Mode 6Abdulbaset Selwy100% (1)
- ElsaWin 4.0 How To Instal PDFDocument38 pagesElsaWin 4.0 How To Instal PDFadrian2009_adiNo ratings yet
- A Report On Industrial Work ExperienceDocument20 pagesA Report On Industrial Work ExperienceAgusiobo Anthony ChukwudiNo ratings yet
- DL - Door LockDocument243 pagesDL - Door LockandysqnNo ratings yet
- Maintenance Manual of Chery Karry - Circuit DiagramDocument16 pagesMaintenance Manual of Chery Karry - Circuit DiagramUmar ShamsudinNo ratings yet
- Viewer 2 EngDocument35 pagesViewer 2 EngChamara JanithNo ratings yet
- Saw Filter (Siemens)Document350 pagesSaw Filter (Siemens)Luiz059100% (1)
- Installation Instructions 30-5130Document8 pagesInstallation Instructions 30-5130alexcus1539No ratings yet
- Norma Iso 9141-2Document21 pagesNorma Iso 9141-2erick alexander hernandezNo ratings yet
- Apc-Smart Ups 400Document44 pagesApc-Smart Ups 400Adam CollinsNo ratings yet
- Autoscan Grason WAUZZZ8E32A120922 227730km 141504miDocument3 pagesAutoscan Grason WAUZZZ8E32A120922 227730km 141504miVoicu FlorinNo ratings yet
- 211-02 Power Steering - Description and Operation - System OperationDocument7 pages211-02 Power Steering - Description and Operation - System OperationCARLOS LIMADANo ratings yet
- 2010 Fusion Hybrid Milan Hybrid: Emergency Response GuideDocument12 pages2010 Fusion Hybrid Milan Hybrid: Emergency Response GuideTung NguyenNo ratings yet
- AEB A4 Od1997 Schema MotoraDocument9 pagesAEB A4 Od1997 Schema MotoraRóbert Ondáš100% (1)
- Diagnosis From The Drivers SeatDocument101 pagesDiagnosis From The Drivers Seatabul hussain100% (1)
- 2.5l Petrol Engine, DAZA: Current Flow DiagramDocument24 pages2.5l Petrol Engine, DAZA: Current Flow DiagramildefonsoNo ratings yet
- Mercedes Clk350 Can IdsDocument1 pageMercedes Clk350 Can Idsjag1961No ratings yet
- Foxwell NT301 OBD OBD2 Engine Universal Car Code Reader Scanner Diagnostic ToolDocument3 pagesFoxwell NT301 OBD OBD2 Engine Universal Car Code Reader Scanner Diagnostic ToolD JocelynNo ratings yet
- Auto WikiDocument313 pagesAuto WikijhpandiNo ratings yet
- Radio Programming InterfaceDocument9 pagesRadio Programming InterfaceNigel SalmonNo ratings yet
- DSO Function Generator ExerciseDocument24 pagesDSO Function Generator ExerciseEdidjo DarwinNo ratings yet
- Product Catalogue 2006: Industrial Doors Docking Systems Service & UpgradingDocument104 pagesProduct Catalogue 2006: Industrial Doors Docking Systems Service & UpgradingMihai TimofteNo ratings yet
- Engine Control Module (ECM) : PGMFI Training Modules OBD-II Training ModulesDocument6 pagesEngine Control Module (ECM) : PGMFI Training Modules OBD-II Training ModulesrayhanNo ratings yet
- Technical Service Information: Automatic Transmission Service GroupDocument4 pagesTechnical Service Information: Automatic Transmission Service GroupPlanta Damiana2No ratings yet
- Did1 Ecu - Reference Manual: Baldur Gíslason January 17, 2021Document95 pagesDid1 Ecu - Reference Manual: Baldur Gíslason January 17, 2021achuo charles100% (1)
- Immobilizer and Smart Key Reset: T-SB-0057-18 July 6, 2018Document15 pagesImmobilizer and Smart Key Reset: T-SB-0057-18 July 6, 2018Konstantin BuNo ratings yet
- Applications: AutomotiveDocument8 pagesApplications: AutomotiveMohammad FaizalNo ratings yet
- Controller Area NetworkDocument3 pagesController Area Network12umairNo ratings yet
- CANopen Dictionary v7Document67 pagesCANopen Dictionary v7bozzec100% (1)
- CAN TutorialDocument22 pagesCAN TutorialNaveen BasavarajacharNo ratings yet
- CAN TutorialDocument22 pagesCAN TutorialApoorva BhattNo ratings yet
- DDN Exa Data Sheet 2023Document2 pagesDDN Exa Data Sheet 2023Obi Wan KenobiNo ratings yet
- Client Server ComputingDocument27 pagesClient Server Computingshriharsh123100% (1)
- FOS 8.2.2b ReleaseNotes 03082023041114Document66 pagesFOS 8.2.2b ReleaseNotes 03082023041114Sagar A.MNo ratings yet
- Access Control Lists: Huawei Technologies Co., LTDDocument14 pagesAccess Control Lists: Huawei Technologies Co., LTDNour LetaiefNo ratings yet
- Principlesof CloudComputing Updated Syllabus VIT VelloreDocument3 pagesPrinciplesof CloudComputing Updated Syllabus VIT VelloreTechno DemonNo ratings yet
- TCP/IP Tutorial: The IP Address and ClassesDocument11 pagesTCP/IP Tutorial: The IP Address and ClassesRajesh JainNo ratings yet
- Acs42 Config GuideDocument214 pagesAcs42 Config GuideOtia ObaNo ratings yet
- VPN Pix PrivateDocument13 pagesVPN Pix PrivateRaj KaranNo ratings yet
- MIPL - AMC Support Escalation Matrix - Ver-1.0Document8 pagesMIPL - AMC Support Escalation Matrix - Ver-1.0Ajay AryaNo ratings yet
- Cloud Digital Leader Best Training Material and Practice Test Q&A FromDocument60 pagesCloud Digital Leader Best Training Material and Practice Test Q&A Fromhitesh100% (3)
- Digsi 5 Quick Notes DIGSI-5-QN0009: SIPROTEC 5 - DIGSI 5 Connection Via EthernetDocument2 pagesDigsi 5 Quick Notes DIGSI-5-QN0009: SIPROTEC 5 - DIGSI 5 Connection Via EthernetMichael Parohinog GregasNo ratings yet
- BSNL TechnicalDocument5 pagesBSNL TechnicalPrashantqmarNo ratings yet
- Az 104 PDFDocument10 pagesAz 104 PDFwilfred maswaya100% (2)
- Security QuestionsDocument27 pagesSecurity Questionsshikhaxohebkhan100% (1)
- Common Requirements For Web Application Vulnerability Scanners For The Internet of ThingsDocument1 pageCommon Requirements For Web Application Vulnerability Scanners For The Internet of ThingsBangsa PEJUANGNo ratings yet
- Delta Programmable Logic Controller DVP Series: Automation For A Changing WorldDocument52 pagesDelta Programmable Logic Controller DVP Series: Automation For A Changing WorldelkimezsNo ratings yet
- VPC PeeringDocument17 pagesVPC PeeringVishwaNo ratings yet
- Ste Ict 8 Module 1 Q1 LCDocument7 pagesSte Ict 8 Module 1 Q1 LCmajinboogaming18No ratings yet
- RAB and RRC Establishment Failures Reasons After Admission ControlDocument2 pagesRAB and RRC Establishment Failures Reasons After Admission ControlMaria Eugenia Pascual100% (2)
- IIUM Wireless Registration and ConfigurationDocument56 pagesIIUM Wireless Registration and ConfigurationEncik AhmadNo ratings yet
- AWS Simple IconsDocument20 pagesAWS Simple IconsSanthosh DevulapalliNo ratings yet
- Junos Telemetry InterfaceDocument150 pagesJunos Telemetry InterfacedeeNo ratings yet
- GSM PHP MySQL Datatransfer - InoDocument3 pagesGSM PHP MySQL Datatransfer - InoZayNabNo ratings yet
- Web Client Arduinbo EthernetDocument5 pagesWeb Client Arduinbo EthernetStudy TimeNo ratings yet
- Synopsis SeminarDocument3 pagesSynopsis SeminarPALAK PAREEKNo ratings yet
- 5 LIFT电梯助手产品介绍Document3 pages5 LIFT电梯助手产品介绍Rebecca DangNo ratings yet
- Bomgar Aha 1 1Document79 pagesBomgar Aha 1 1mariamNo ratings yet
- AviatrixDocument190 pagesAviatrixBala SubramanyamNo ratings yet
- SRAN 21A ChangesDocument210 pagesSRAN 21A Changesmoustafa.aymanNo ratings yet