You might also like
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- 12 Detail Kuda Kuda ModelDocument1 page12 Detail Kuda Kuda ModelBoby culiusNo ratings yet
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- NM PHPDocument8 pagesNM PHPBoby culiusNo ratings yet
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (895)
- Project Report1Document202 pagesProject Report1Boby culiusNo ratings yet
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- CSM Grap PDFDocument1 pageCSM Grap PDFBoby culiusNo ratings yet
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (588)
- Show Static Pushover Curve: Run A Static Nonlinear AnalysisDocument5 pagesShow Static Pushover Curve: Run A Static Nonlinear AnalysisBoby culiusNo ratings yet
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (400)
- Mass Source DefinitionDocument1 pageMass Source DefinitionBoby culiusNo ratings yet
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- Show Static Pushover Curve: Run A Static Nonlinear AnalysisDocument5 pagesShow Static Pushover Curve: Run A Static Nonlinear AnalysisBoby culiusNo ratings yet
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Sikament NNDocument2 pagesSikament NNBoby culiusNo ratings yet
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- Sikament NNDocument2 pagesSikament NNBoby culiusNo ratings yet
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- Sika AerDocument2 pagesSika AerBoby culiusNo ratings yet
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Plastiment VZDocument2 pagesPlastiment VZBoby culiusNo ratings yet
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Sikament 520Document2 pagesSikament 520Boby culiusNo ratings yet
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- Sikament - 163: High Range Water - ReducingDocument2 pagesSikament - 163: High Range Water - ReducingBoby culiusNo ratings yet
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- Dyna Bolt InstallDocument1 pageDyna Bolt InstallBoby culiusNo ratings yet
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (345)
- Space Structures Principles and PracticeDocument8 pagesSpace Structures Principles and PracticeBoby culiusNo ratings yet
- Ec PDFDocument1,232 pagesEc PDFАндрей НадточийNo ratings yet
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- BOOM Camion (165 297)Document133 pagesBOOM Camion (165 297)David BriceñoNo ratings yet
- Evo Transmission InformationDocument13 pagesEvo Transmission InformationReynaldo Juanito Ludo LafortezaNo ratings yet
- C801 DDRCSDocument64 pagesC801 DDRCSKeval8 VedNo ratings yet
- 96463Document45 pages96463Paulo César Daqui LoureiroNo ratings yet
- XE145F Presentation AUMDocument21 pagesXE145F Presentation AUMrudyNo ratings yet
- Memo LubDocument57 pagesMemo LubjoelNo ratings yet
- 02 - G12 Powertrain PDFDocument112 pages02 - G12 Powertrain PDFSalisburNo ratings yet
- Aqua Series Water-Cooled Chillers 04-811-50038Document2 pagesAqua Series Water-Cooled Chillers 04-811-50038sil_muahdibNo ratings yet
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- CEPL - Company ProfileDocument11 pagesCEPL - Company ProfileKamalNo ratings yet
- SOHC Head Flow Data + CarburetorsDocument62 pagesSOHC Head Flow Data + CarburetorsVincenzo SepeNo ratings yet
- Top and Cabinet Parts: For Model: 3RLSQ8033SW2 (White/Grey)Document13 pagesTop and Cabinet Parts: For Model: 3RLSQ8033SW2 (White/Grey)CristianNo ratings yet
- SP Concare Pvt. LTD.: Repair & RetrofittingDocument15 pagesSP Concare Pvt. LTD.: Repair & RetrofittingAnkita Baban GavadeNo ratings yet
- Rr410801 Transport PhenomenaDocument8 pagesRr410801 Transport PhenomenaSrinivasa Rao GNo ratings yet
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (121)
- Japan: EDI CT OF GovernmentDocument23 pagesJapan: EDI CT OF GovernmentHan Win AungNo ratings yet
- Brake SystemDocument42 pagesBrake SystemeduamaNo ratings yet
- Lifting Sling Capacity Equations, Calculator and Considerations - Engineers EdgeDocument2 pagesLifting Sling Capacity Equations, Calculator and Considerations - Engineers EdgeRaja GopalNo ratings yet
- Manual (Master 2014) Movano Ope Part 3lDocument64 pagesManual (Master 2014) Movano Ope Part 3ledsononohara50% (2)
- Experiment 2 Data Enthalpy of Fusion For Water: T T T T T HFDocument7 pagesExperiment 2 Data Enthalpy of Fusion For Water: T T T T T HFmeropeatlaNo ratings yet
- A Creep Life Assessment Method For Boiler Pipes Using Small Punch Creep TestDocument6 pagesA Creep Life Assessment Method For Boiler Pipes Using Small Punch Creep TestAndrea CalderaNo ratings yet
- Is 1786Document5 pagesIs 1786Jeevan ShendreNo ratings yet
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- SKY AIR R32 - Bomba de CalorDocument196 pagesSKY AIR R32 - Bomba de CalorMiguel HerediaNo ratings yet
- Gears PresentationDocument33 pagesGears PresentationNaveen YadavNo ratings yet
- D SADFNDJSFGVVDFDocument27 pagesD SADFNDJSFGVVDFFahmi AzisNo ratings yet
- Sunfolding Pneumatics White Paper 2020 07Document8 pagesSunfolding Pneumatics White Paper 2020 07Hilmi Dhiya UlhaqNo ratings yet
- Studi Eksperimental Pengaruh Penambahan Twisted Tape Terhadap Perpindahan Kalor Dan Penurunan Tekanan Pada Water To Air HeatDocument7 pagesStudi Eksperimental Pengaruh Penambahan Twisted Tape Terhadap Perpindahan Kalor Dan Penurunan Tekanan Pada Water To Air Heatsulaiman rasyidNo ratings yet
- 4 Laws of MotionDocument15 pages4 Laws of MotionHimanshu Gupta100% (1)
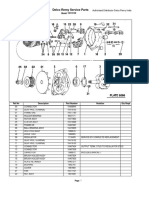
- Delco Remy Service Parts: New Indo Trading Company Authorised Distributor Delco Remy IndiaDocument2 pagesDelco Remy Service Parts: New Indo Trading Company Authorised Distributor Delco Remy IndiaWilson AcostaNo ratings yet
- Service Parts List: M18™ 1/4" Hex Impact Driver - Single SpeedDocument2 pagesService Parts List: M18™ 1/4" Hex Impact Driver - Single SpeedhiramfgarciaNo ratings yet
- Pennbarry SX Catalogue TS v9bDocument34 pagesPennbarry SX Catalogue TS v9bjacaNo ratings yet