You might also like
- Analytical Methods in Conduction Heat TransferDocument242 pagesAnalytical Methods in Conduction Heat TransferMayank Sharma50% (2)
- Taewoo Kim Et Al. v. Jump TradingDocument44 pagesTaewoo Kim Et Al. v. Jump TradingCrainsChicagoBusiness100% (1)
- Iterative Methods For Sparse Linear SystemsDocument460 pagesIterative Methods For Sparse Linear SystemsDavid BillaNo ratings yet
- Checklist Code ReviewDocument2 pagesChecklist Code ReviewTrang Đỗ Thu100% (1)
- GPR Data ProcessingDocument38 pagesGPR Data ProcessingInformerNo ratings yet
- Semi-Analytical Solutions of Non-Linear Differential Equations ArDocument137 pagesSemi-Analytical Solutions of Non-Linear Differential Equations ArmmrmathsiubdNo ratings yet
- #Data Assimilation - Mathematical Concepts and Instructive ExamplesDocument140 pages#Data Assimilation - Mathematical Concepts and Instructive ExamplesMichael G. TadesseNo ratings yet
- Two Phase Fluid MechanicsDocument35 pagesTwo Phase Fluid MechanicsKingsley Etornam AnkuNo ratings yet
- Cam5 DescDocument283 pagesCam5 DescCheng ZhouNo ratings yet
- Understanding Quantum Measurement From The Solution of Dynamical Models - Armen E. Allahverdyan, Roger Balian, Theo M. Nieuwenhuizen - 1107.2138v4Document201 pagesUnderstanding Quantum Measurement From The Solution of Dynamical Models - Armen E. Allahverdyan, Roger Balian, Theo M. Nieuwenhuizen - 1107.2138v4dagush100% (1)
- Computational Methods in Power System AnalysisDocument113 pagesComputational Methods in Power System Analysisrsrtnj100% (8)
- Geometric Wave EquationDocument279 pagesGeometric Wave EquationUirá MatosNo ratings yet
- (Horst D. Schulz, Georg Teutsch) Geochemical Proce PDFDocument293 pages(Horst D. Schulz, Georg Teutsch) Geochemical Proce PDFPaul Heriver Gonzales PalaciosNo ratings yet
- Multi-Agent Coordination: Fluid-Inspired and Optimal Control ApproachesDocument153 pagesMulti-Agent Coordination: Fluid-Inspired and Optimal Control ApproachesKayhan UlgenNo ratings yet
- KeithGalvin PhDthesisDocument162 pagesKeithGalvin PhDthesisHolli HortonNo ratings yet
- Out 13Document150 pagesOut 13mfmechanicsNo ratings yet
- Bloques de Tierra Compactada Estabilizados Con Aglomerante Natural CP 2015-GuatemalaDocument14 pagesBloques de Tierra Compactada Estabilizados Con Aglomerante Natural CP 2015-GuatemalamaximoalbertoNo ratings yet
- Traffic Flow TheoryDocument108 pagesTraffic Flow TheoryAlex BratuNo ratings yet
- Thesis 1997 AbdullahDocument259 pagesThesis 1997 Abdullahtabadredeen02No ratings yet
- Aerocuda: The 2-d CFD CodeDocument59 pagesAerocuda: The 2-d CFD Codebucsfan221100% (1)
- EulerDocument251 pagesEulerVicky Wildan YustisiaNo ratings yet
- 2014 Elias WZPHDDocument182 pages2014 Elias WZPHDDr ADITYA VORANo ratings yet
- Shrodinger PHDDocument250 pagesShrodinger PHDmohammadali naimNo ratings yet
- Wavelet PDFDocument287 pagesWavelet PDFVivekPendyalaNo ratings yet
- PHD Thesis On Physical Design GoodDocument153 pagesPHD Thesis On Physical Design GoodVenkat GadireddyNo ratings yet
- PhDThesis DellElceDocument204 pagesPhDThesis DellElceDiego PinheiroNo ratings yet
- Klein Berg BookDocument459 pagesKlein Berg BookAbhinav PujariNo ratings yet
- Simulation of Fractional Brownian Motion: Ton Dieker Ton@cwi - NLDocument77 pagesSimulation of Fractional Brownian Motion: Ton Dieker Ton@cwi - NLnahv_08No ratings yet
- Quentin Estimation and Prediction of Wave Inpit and System States Based On Local Hydropressure and Machinery ResponseDocument78 pagesQuentin Estimation and Prediction of Wave Inpit and System States Based On Local Hydropressure and Machinery ResponseMuntoiaNo ratings yet
- Noncommutative Statioary ProcessesDocument147 pagesNoncommutative Statioary ProcesseswellbeingempireNo ratings yet
- Dynamic Analysis of Multi-Degree-Of-Freedom Systems Using A PoleDocument90 pagesDynamic Analysis of Multi-Degree-Of-Freedom Systems Using A PoleChristian ZoundjiNo ratings yet
- (Lecture Notes in Control and Information Sciences 385) Raphaël Jungers (Auth.) - The Joint Spectral Radius - Theory and applications-Springer-Verlag Berlin Heidelberg (2009) PDFDocument144 pages(Lecture Notes in Control and Information Sciences 385) Raphaël Jungers (Auth.) - The Joint Spectral Radius - Theory and applications-Springer-Verlag Berlin Heidelberg (2009) PDFRolando perez ccentaNo ratings yet
- 1568813074Document379 pages1568813074seotut100% (1)
- Elements of Computational Fluid Dynamics: P. WesselingDocument147 pagesElements of Computational Fluid Dynamics: P. WesselingLuis Felipe Gutierrez MarcantoniNo ratings yet
- Modelling and Design of Graphene-Based THZ DevicesDocument162 pagesModelling and Design of Graphene-Based THZ DevicesMohamed MOUMOUNo ratings yet
- Approximate Solutions of Common Fixed-Point Problems - A. J.zaslavskiDocument457 pagesApproximate Solutions of Common Fixed-Point Problems - A. J.zaslavskiНиколай Бобков100% (1)
- Meshless Methods For Elliptic and Free Boundary ProblemsDocument170 pagesMeshless Methods For Elliptic and Free Boundary ProblemsJoderadorNo ratings yet
- The Computation Structure of LCADocument20 pagesThe Computation Structure of LCARamez Mohamad100% (1)
- Alrowaili Mtsu 0170E 10886Document118 pagesAlrowaili Mtsu 0170E 10886Chang-Joon LeeNo ratings yet
- Openfoam 2d Refinement Explanation Dynamic Meshing Around Fluid-Fluid Interfaces With Applications TDocument220 pagesOpenfoam 2d Refinement Explanation Dynamic Meshing Around Fluid-Fluid Interfaces With Applications TMyrtw WoodpeckersNo ratings yet
- Numerical Method 2Document68 pagesNumerical Method 2MeghrajMoreyNo ratings yet
- Thesis 1Document154 pagesThesis 1Konderu AnilNo ratings yet
- Csc-Report13 Englisch Final-Mit Umschlag PDFDocument138 pagesCsc-Report13 Englisch Final-Mit Umschlag PDFSiharath PhoummixayNo ratings yet
- Continuous Low-Thrust Trajectory Optimization PDFDocument136 pagesContinuous Low-Thrust Trajectory Optimization PDFkuldeepNo ratings yet
- Modeling and Simulation of Time-Harmonic Wave Propagation in Cylindrical Impedance Guides: Application To An Oil Well Stimulation TechnologyDocument130 pagesModeling and Simulation of Time-Harmonic Wave Propagation in Cylindrical Impedance Guides: Application To An Oil Well Stimulation TechnologyMath055No ratings yet
- 8 BeeDocument162 pages8 BeeElhussain HassanNo ratings yet
- PHD Thesis Bernardo R C Costa Lima Final SubmissionDocument204 pagesPHD Thesis Bernardo R C Costa Lima Final SubmissionSohaib ShamsiNo ratings yet
- Swan Technical ManualDocument132 pagesSwan Technical ManualmikeprefectureNo ratings yet
- Bhaadu PHDDocument137 pagesBhaadu PHDBhaaduNo ratings yet
- Environmental Hydraulics: Hydrodynamic and Pollutant Transport Models of Lakes and Coastal WatersFrom EverandEnvironmental Hydraulics: Hydrodynamic and Pollutant Transport Models of Lakes and Coastal WatersRating: 5 out of 5 stars5/5 (1)
- Glow Discharge Plasmas in Analytical SpectroscopyFrom EverandGlow Discharge Plasmas in Analytical SpectroscopyR. Kenneth MarcusNo ratings yet
- Nano Mechanics and Materials: Theory, Multiscale Methods and ApplicationsFrom EverandNano Mechanics and Materials: Theory, Multiscale Methods and ApplicationsNo ratings yet
- Electron Capture: Theory and Practice in ChromatographyFrom EverandElectron Capture: Theory and Practice in ChromatographyNo ratings yet
- Handbook of Computational Fluid MechanicsFrom EverandHandbook of Computational Fluid MechanicsRating: 3.5 out of 5 stars3.5/5 (2)
- A Tour of Triangle GeometryDocument52 pagesA Tour of Triangle GeometryarendaleNo ratings yet
- A Tour of Triangle GeometryDocument52 pagesA Tour of Triangle GeometryarendaleNo ratings yet
- Numerical Methods FinanceDocument10 pagesNumerical Methods FinanceIsbar PratamaNo ratings yet
- 2009-04-02Document24 pages2009-04-02Isbar PratamaNo ratings yet
- 2010 05 24 - LWR - Mazare Claudel Bayen PDFDocument21 pages2010 05 24 - LWR - Mazare Claudel Bayen PDFIsbar PratamaNo ratings yet
- Model LWRDocument12 pagesModel LWRIsbar PratamaNo ratings yet
- Ms Word2Document2 pagesMs Word2Isbar PratamaNo ratings yet
- Activity Aware MapDocument12 pagesActivity Aware MapIsbar PratamaNo ratings yet
- Topics For Oral PresentationDocument6 pagesTopics For Oral PresentationMohd HyqalNo ratings yet
- MSC 200Document18 pagesMSC 200Amit KumarNo ratings yet
- AppendixA LaplaceDocument12 pagesAppendixA LaplaceSunny SunNo ratings yet
- Trading Book - AGDocument7 pagesTrading Book - AGAnilkumarGopinathanNairNo ratings yet
- Cs09 404 Programming Paradigm (Module 1 Notes)Document24 pagesCs09 404 Programming Paradigm (Module 1 Notes)Rohith BhaskaranNo ratings yet
- Catalyst 4500 SeriesDocument1,230 pagesCatalyst 4500 SeriesnvleninkumarNo ratings yet
- Minimization Z Z Z Z Maximization Z Z : LP IPDocument13 pagesMinimization Z Z Z Z Maximization Z Z : LP IPSandeep Kumar JhaNo ratings yet
- Macro Economics A2 Level Notes Book PDFDocument33 pagesMacro Economics A2 Level Notes Book PDFMustafa Bilal50% (2)
- Upend RA Kumar: Master List of Approved Vendors For Manufacture and Supply of Electrical ItemsDocument42 pagesUpend RA Kumar: Master List of Approved Vendors For Manufacture and Supply of Electrical Itemssantosh iyerNo ratings yet
- LLB IV Sem GST Unit I Levy and Collection Tax by DR Nisha SharmaDocument7 pagesLLB IV Sem GST Unit I Levy and Collection Tax by DR Nisha Sharmad. CNo ratings yet
- AXIOM75 50 25 1B - Rev.6 10.000MHzDocument4 pagesAXIOM75 50 25 1B - Rev.6 10.000MHzTürkay PektürkNo ratings yet
- Industrial Training ReportDocument19 pagesIndustrial Training ReportKapil Prajapati33% (3)
- Surge Protection Devices GuidesDocument167 pagesSurge Protection Devices GuidessultanprinceNo ratings yet
- Muscular System Coloring Book: Now You Can Learn and Master The Muscular System With Ease While Having Fun - Pamphlet BooksDocument8 pagesMuscular System Coloring Book: Now You Can Learn and Master The Muscular System With Ease While Having Fun - Pamphlet BooksducareliNo ratings yet
- Urban LifestyleDocument27 pagesUrban LifestyleNindy AslindaNo ratings yet
- Rated Operational Current: InstructionsDocument12 pagesRated Operational Current: InstructionsJhon SanabriaNo ratings yet
- A Study On Awareness of Mutual Funds and Perception of Investors 2Document89 pagesA Study On Awareness of Mutual Funds and Perception of Investors 2Yashaswini BangeraNo ratings yet
- Making Sense of The Future of Libraries: Dan Dorner, Jennifer Campbell-Meier and Iva SetoDocument14 pagesMaking Sense of The Future of Libraries: Dan Dorner, Jennifer Campbell-Meier and Iva SetoBiblioteca IICENo ratings yet
- TMIS07 - Kalam Internship - S7 Tesla MindsDocument3 pagesTMIS07 - Kalam Internship - S7 Tesla MindsDMJ JonesNo ratings yet
- Man of The House Faq: About MothDocument2 pagesMan of The House Faq: About MothPrapya BarmanNo ratings yet
- MyResume RecentDocument1 pageMyResume RecentNish PatwaNo ratings yet
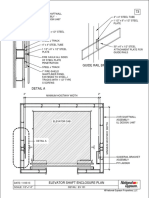
- Guide Rail Bracket AssemblyDocument1 pageGuide Rail Bracket AssemblyPrasanth VarrierNo ratings yet
- Role of Quick Response To Supply ChainDocument15 pagesRole of Quick Response To Supply ChainSanuwar RashidNo ratings yet
- UGC NET Paper I PreviousDocument16 pagesUGC NET Paper I PreviousKirran Khumar GollaNo ratings yet
- Repro Indo China Conf PDFDocument16 pagesRepro Indo China Conf PDFPavit KaurNo ratings yet
- Segmentation of Qarshi Industries Private Limited PakistanDocument6 pagesSegmentation of Qarshi Industries Private Limited PakistanReader100% (1)
- English Examination 1-Bdsi-XiDocument1 pageEnglish Examination 1-Bdsi-XiHarsuni Winarti100% (1)
- Sci5 q3 Module3 NoanswerkeyDocument22 pagesSci5 q3 Module3 NoanswerkeyRebishara CapobresNo ratings yet