Professional Documents
Culture Documents
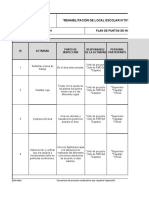
Diseño y Construccion
Uploaded by
Haanniiaa RodriguezCopyright
Available Formats
Share this document
Did you find this document useful?
Is this content inappropriate?
Report this DocumentCopyright:
Available Formats
Diseño y Construccion
Uploaded by
Haanniiaa RodriguezCopyright:
Available Formats
REVISTA INGENIERA E INVESTIGACIN VOL. 26 No.
3, DICIEMBRE DE 2006 (5-11)
Diseo y construccin de prototipo de pinza y rotador
(funciones de pronacin y supinacin) para prtesis
mioelctrica de mano
Designing and constructing prototype hand and forearm models (pronation and
supination) for myoelectric hand prostheses
Claudia Marcela Snchez1, Jair Leopoldo Loaiza2 y Carlos Julio Corts3
RESUMEN
El trabajo que se lleva a cabo en la ingeniera de rehabilitacin es el de desarrollar productos asociados con la
rehabilitacin fsica, principalmente prtesis para amputaciones de miembro superior o inferior. El desarrollo de
tales productos implica la aplicacin de diseo mecnico, seleccin de materiales y procesos de manufactura
adecuados para sustituir algunas de las funciones que el paciente puede haber perdido. El trabajo que se presenta
tiene como propsito establecer una solucin ptima para suplir la necesidad de un paciente con amputacin
de antebrazo a nivel proximal de codo. Este artculo describe el proceso que se ha seguido, desde entender el
lenguaje mdico, hasta desarrollar un prototipo funcional que sea capaz de sustituir dos funciones del miembro
superior como lo son la pinza tridigital y el movimiento de pronacin y supinacin del antebrazo.
Palabras clave: prtesis mioelctrica de mano, pronacin, supinacin, diseo mecnico.
ABSTRACT
Rehabilitation engineerings work consists of developing products associated with physical rehabilitation, mainly
prostheses for upper and lower extremity amputees. Developing such products implies mechanical design and
the suitable selection of materials and manufacturing process to replace some of the functions which a patient
may have lost. The work presented here was aimed at establishing an optimal solution for substituting the needs
of a patient having had the forearm amputated at the proximal level of the elbow. This article describes the whole
process followed, from understanding the medical language to developing a functional prototype able to replace
the arms two functions (i.e. the hand and forearms pronation and supination movements).
Keywords: myoelectric hand prostheses, pronation, supination, mechanical design
Recibido: junio 16 de 2005
Aceptado: septiembre 19 de 2006
Antecedentes
En el Grupo de Investigacin en Biomecnica de la Universidad Nacional de Colombia (GIBM-UNCB No. COL0009476)
se ha venido trabajando sobre prtesis para miembro superior desde los aos 90. Dentro de los desarrollos en este
campo se encuentra el proyecto de investigacin Desarrollo
de prtesis mioelctrica de mano, el cual dio origen a la
elaboracin de este trabajo. La investigacin mencionada
fue apoyada por la Divisin de Investigaciones de Bogot,
DIB, Cod. 80814, fases 1 y 2 (2002-2003). En el marco del
proyecto aprobado por la DIB, durante el ao 2002 se llev
a cabo el proceso de diseo de un prototipo en el trabajo
Sistema mecnico para prtesis mioelctrica de mano, el
cual inclua tres mdulos que pretendan suplir tres de las
funciones que habra perdido un paciente con amputacin
proximal de codo (Figura 1).
Ingeniera mecnica, Universidad Nacional de Colombia, Bogot. Asesor, Programa Nacional de Desarrollo Tecnolgico Industrial y Calidad,
Colciencias. Docente ocasional, Departamento de Ingeniera Mecnica y Mecatrnica, Universidad Nacional de Colombia, Bogot. cmsanchezr@
unal.edu.co, cmsanchezr@gmail.com
2
Ingeniero mecnico, Universidad Nacional de Colombia, Bogot. Docente Ocasional, Departamento de Ingeniera Mecnica y Mecatrnica,
Universidad Nacional de Colombia, Bogot. jlloaizab@unal.edu.co
3
Ingeniero mecnico. M.Sc. en Materiales y Procesos de Manufactura. Comisin de estudios de Doctorado en Manufactura. Profesor asociado,
Departamento de Ingeniera Mecnica y Mecatrnica, Universidad Nacional de Colombia, Bogot. cjcortesr@unal.edu.co
1
DISEO Y CONSTRUCCIN DE PROTOTIPO DE PINZA Y ROTADOR (FUNCIONES DE PRONACIN Y SUPINACIN) PARA PRTESIS MIOELCTRICA DE MANO
Especficamente se busca que los prototipos de los dos mdulos, tanto la pinza tridigital como el rotador, permitan que
el paciente pueda llevar a cabo las siguientes actividades:
Figura 1. Funciones a sustituir a travs del diseo de prototipo.
Fuente: Corts y Nio, 1997
Los mdulos diseados fueron una pinza tridigital para suplir
la funcin de prensin, un rotador para suplir la pronacin
supinal del antebrazo, y un flexo extensor para suplir las
funciones de flexin extensin.
Una vez revisado el diseo del prototipo, se encontr que
era necesario optimizar ciertos elementos que impedan un
adecuado funcionamiento, y por ende minimizaban las ventajas de la solucin propuesta. Por esta razn fue necesario
dividir el proyecto y buscar una solucin ms
adecuada para el diseo de los tres mdulos
que lo componan inicialmente.
Pronacin supinal de antebrazo
Agarre de fuerza: por oposicin de los dedos flejados
Prensin ms estable que en el caso de una prensa
bidigital
Fuerte prensin para retener objetos largos
Manejo de objetos delicados y sostenerlos firmemente
con movimiento casi normal
Apariencia esttica similar en estructura a la de la mano
Actividades normales poco pesadas en el trabajo
La identificacin de las actividades que debe realizar el
paciente permite establecer las caractersticas primarias del
prototipo a disear.
El desarrollo de este trabajo pretende optimizar
el prototipo mediante el diseo independiente
de dos de los tres mdulos.
Objetivos
-
Redisear y construir un prototipo de pinza
tridigital para prtesis mioelctrica de mano
encaminada a mejorar la prensin palmar y
reduccin del peso con respecto al diseo
del proyecto Sistema mecnico para prtesis mioelctrica de mano.
Redisear un prototipo de rotador para
prtesis mioelctrica de mano encaminada
a mejorar las caractersticas del diseo del
proyecto Sistema mecnico para prtesis mioelctrica
de mano.
Evaluar el sistema de transmisin de potencia de la
prtesis en relacin con su eficiencia.
Estudiar sistemas de transmisin de potencia alternos
encaminados a mejorar las condiciones actuales.
Metodologa de diseo
Identificacin del problema
Se pretende suplir la necesidad de un paciente con amputacin proximal de codo (Nardin Frankel, 2001) para las
siguientes funciones especficas:
-
Prensin tridigital
Pronacin supinal de antebrazo.
El mapa conceptual del desarrollo del prototipo se presenta
en la Figura 2.
REVISTA INGENIERA E INVESTIGACIN VOL. 26 No.3, DICIEMBRE DE 2006
Figura 2. Mapa conceptual de la prtesis mioelctrica de mano
Como se busca que el paciente tenga una mejor calidad
de vida y que el uso de una prtesis le permita minimizar
el impacto de su discapacidad, y dadas las condiciones en
que se presenta este tipo de amputacin es mas cmodo y
viable que el paciente se adapte a una prtesis con fuente
de energa extracorprea, la propuesta es el diseo de los
prototipos de pinza tridigital y rotador para una prtesis
mioelctrica (Franca et al., 2002).
El principio de este tipo de prtesis es el control mioelctrico
(De Vincenzo et al., 2000), el cual se basa en el concepto
de aprovechamiento de la energa residual del msculo, es
decir: siempre que un msculo se contrae, se produce una
pequea seal elctrica (EMG) que es creada por la interaccin qumica en el cuerpo. Esta seal es muy pequea
(5 a 200 microvoltios) (Alonso et al., 2002). En un paciente
con prtesis mioelctrica (Dario et al., 2000), para registrar
SNCHEZ, LOAIZA, CORTS
dicho tipo de seales se utilizan sensores (electrodos) que
se ponen en contacto con la superficie de la piel. Una vez
registrada la seal, se amplifica y es procesada despus por
un controlador que conmuta los motores encendindolos y
apagndolos en la mano, la mueca o el codo para producir
movimiento y funcionalidad (Schulz et al., 2001).
Documentacin relacionada con los pacientes
Para hacer un diseo adecuado de prtesis es necesario
tener en cuenta que este elemento debe reemplazar una
parte del cuerpo humano y que, por lo tanto, debe guardar
unas proporciones adecuadas para que tenga una apariencia
natural. Por esta razn es necesario restringir las dimensiones a las medidas antropomtricas, si no de cada paciente
en particular, por lo menos de un grupo tnico en general
(Nardin Frankel, 2001).
Especificaciones de diseo
El diagrama de funciones de la prtesis que se muestran en la
Figura 3, permite identificar las especificaciones de diseo.
Iniciar el proceso de diseo utilizando la tcnica de despliegue de funcin de calidad (Quality Function Deployment,
QFD), requiere vincular la voz de los profesionales de la
salud, para lo cual es necesario identificar sus necesidades,
que en este caso son las de los mdicos ortopedistas, rehabilitadores, fisiatras, fisioterapeutas, psiclogos, tcnicos
protesistas, pacientes y sus familiares.
Los requerimientos de la prtesis son los siguientes:
Tabla 2. Requerimientos del usuario (Olaya, 2003)
En la Tabla 1 se relacionan las caractersticas antropomtricas
de peso y longitud en el caso de pacientes colombianos
(Corts y Nio, 1997).
Tabla 1. Antropometra de la mano4. Valores dados en porcentaje
Para el diseo del prototipo se tomaron los datos antropomtricos de un paciente masculino, ya que en Colombia son
los hombres quienes ms sufren de este tipo de amputacin,5
con un peso de 64 kg y una estatura de 1,70 m. Teniendo
en cuenta el tipo de paciente para el cual se va a realizar
el diseo, se seleccionan las condiciones de operacin: la
fuerza para realizar la prensin tendr una carga de 80 N
y levantar una carga de 2 kg con el rotador. Los valores
mximos de peso y longitud del prototipo, de acuerdo con
las restricciones dadas por la antropometra del paciente,
son: longitud mx. 364,65 mm, peso mx. 1612,8 g.
Una vez identificados los requerimientos del usuario se
procede a traducirlos en variable de ingeniera mediante la
implementacin del QFD (Akao, 1990), con el propsito de
cumplir con las expectativas de la poblacin que lo requiere,
incluyendo la voz del cliente en el diseo del mismo. Las
variables de ingeniera, extradas de la casa de la calidad
(House of Quality), se presentan en la Tabla 3.
Una vez evaluadas las posibilidades, y teniendo en cuenta
las restricciones del peso de la prtesis, se consideraron
materiales como duraluminio y aluminio; adems, se incluy
acero inoxidable para el diseo de las partes metlicas y
tefln de alta resistencia para los rodamientos. Se seleccionaron motores DC con 12 V. El tiempo de operacin de la
prtesis diariamente requerida es de 8 horas, debido a la
autonoma que demanda el paciente para la realizacin
de sus actividades y porque las bateras por lo general no
duran un mayor tiempo; en este caso la batera alimenta dos
motores, tanto el de la pinza como el del rotador.
Diseo conceptual y preliminar
Figura 3. Diagrama de caja transparente. Funciones de la
prtesis de mano, mdulos: pinza tridigital y rotador
4
5
Las alternativas previas a la toma de decisiones de los sistemas a disear se mencionan a continuacin:
ibd.
ibd.
REVISTA INGENIERA E INVESTIGACIN VOL. 26 No.3, DICIEMBRE DE 2006
DISEO Y CONSTRUCCIN DE PROTOTIPO DE PINZA Y ROTADOR (FUNCIONES DE PRONACIN Y SUPINACIN) PARA PRTESIS MIOELCTRICA DE MANO
Se selecciona un tren paralelo y un mecanismo de sinfn
corona debido a que este ltimo ofrece autobloqueo y es
posible compensar las prdidas de potencia del sinfn con
el aumento del torque en el reductor (tren de engranajes),
adems de tener una manufactura relativamente simple, ya
que son piezas que se pueden fabricar por procesos convencionales. Permite una alta reduccin de velocidad, que
es una caracterstica importante particularmente para los
motores que se consiguen en el mercado nacional, adems
de ser el sistema mayormente utilizado en la transmisin
de potencia de las prtesis, lo cual corrobora que, por lo
pronto, es el ms apropiado.
Tabla 3. Variables de ingeniera
Estructura de la pinza
Se tienen tres alternativas que podran ser la solucin
potencial del problema (Snchez et al., 2003).
-
Sinfn corona con dedos de pinza unidos directamente
Levas con seguidores unidos a los dedos de la pinza
Sistema de transmisin de potencia
Se tienen tres posibilidades que daran una solucin potencial del problema.
-
Sinfn corona que acciona mecanismo de barras
Sinfn corona
Reductor - levas
Planetarios - sinfn corona
Para la pinza tridigital se escogi el sistema de cuatro barras
(Figura 4) debido a que es simple, adems de permitir
ubicar los ngulos ptimos para incrementar la fuerza de
prensin. Aunque tiene mayor nmero de piezas que
otras opciones, se puede fabricar fcilmente porque su
geometra no es compleja.
Figura 4. Pinza tridigital. a. Prtesis de proyecto Sistema
mecnico para prtesis mioelctrica de mano (Guzmn,
2003) b. Prtesis Otto Bock
REVISTA INGENIERA E INVESTIGACIN VOL. 26 No.3, DICIEMBRE DE 2006
SNCHEZ, LOAIZA, CORTS
Una vez establecida la geometra de los dedos y los elementos mecnicos de transmisin de potencia asociados,
usando un modelo de prtesis de una casa comercial (Otto
Bock), se dibujaron las piezas en Solid Works, y a partir del
mdulo de Dinamic Designer se realizaron simulaciones
de apertura y cierre de la pinza con el fin de establecer:
gasto energtico, requerimientos de potencia y cinemtica
de las partes.
Debido al espacio que se tiene para el rotador, el cual debe
igualmente cumplir con las caractersticas antropomtricas,
es ms conveniente que el sinfn corona, ya que se obtienen
buenos resultados de potencia y velocidad en un espacio
reducido.
Estos resultados se utilizaron para establecer, haciendo
cambios geomtricos de la disposicin de los apoyos de la
prtesis, una mejora en el sistema, disminuyendo el consumo de potencia para optimizar la pinza que ya estaba
diseada, logrando disminuir el consumo de potencia de
la prtesis en alrededor de tres vatios.
Los materiales utilizados en la produccin del prototipo por
diseo se muestran en la Tabla 4
Tabla 4. Materiales para la pinza
Figura 5. Rotador a. Prtesis del proyecto Sistema mecnico
para prtesis mioelctrica de mano (Guzmn, 2003) b. Prtesis del diseo propuesto
Siguiendo el mismo procedimiento llevado a cabo con la
pinza, para el rotador se hicieron simulaciones con Dinamic
Designer para establecer los requerimientos de potencia del
mismo, y se procedi en ambos casos a realizar el clculo
de los elementos de mquinas, generando as el diseo de
los dos mdulos.
Estructura del rotador
Se proponen tres alternativas para el diseo del rotador, que
podran ser la solucin potencial del problema.
-
Sistema sinfn corona
Engranaje corona con motor excntrico
Sistema de planetarios con salida de motor central
En la seleccin de los materiales para manufacturar los
prototipos se busca baja densidad pero buena resistencia
mecnica.
Los materiales de diseo utilizados para el rotador son los
siguientes:
Tabla 5. Materiales para rotador
Diseo de detalle (Snchez et al., 2003)
Finalmente, para el rotador, se selecciona el sistema planetario debido a que ofrece una configuracin sencilla,
tiene menos prdidas de potencia que en el sinfn corona y
ofrece posibilidades de manufactura relativamente simples.
Para el clculo de la mayora de los elementos de la pinza, se
utilizaron los mdulos de diseo de un programa de slidos
(Solid Edge), mientras para el rotador se realizaron los clculos
valindose de mtodos convencionales (Norton, 1995).
Una vez realizados los clculos de diseo correspondientes,
las caractersticas del producto final fueron las siguientes:
En el proceso de clculo en el caso de la pinza se estableci que la posicin donde sufre mayores esfuerzos es en
REVISTA INGENIERA E INVESTIGACIN VOL. 26 No.3, DICIEMBRE DE 2006
DISEO Y CONSTRUCCIN DE PROTOTIPO DE PINZA Y ROTADOR (FUNCIONES DE PRONACIN Y SUPINACIN) PARA PRTESIS MIOELCTRICA DE MANO
la apertura media (a 36 grados de giro de la corona). Las
posiciones y fuerzas encontradas se relacionan en la Tabla
6. La relacin de fuerza vs. las posiciones y el prototipo de
la pinza tridigital se muestra en la Figura 6.
lizar por mecanizado convencional, razn por la cual fue
necesario hacerlo mediante el proceso de electroerosin
por hilo, proceso que nos fue facilitado por la empresa
Ortomac S.A.
Tabla 6. Fuerza en apoyos vs. posicin de la corona para la
pinza tridigital
Para la pinza
Velocidad de apertura
47,5 mm/s
Fuerza de prensin
80 N
Peso
600 g.
Dimensiones generales
Longitud
170 mm
Voltaje
12 V
Apertura mxima
95 mm.
Figura 7. Foto Mdulo pinza tridigital 1-2003
As mismo, la apariencia del prototipo de rotador diseado
es la siguiente:
Figura 6. Anlisis esttico de la pinza en diferentes posiciones
El prototipo de Pinza Tridigital se puede ver en la figura 7.
Para el rotador
Conclusiones
Velocidad de rotacin
6 rpm
Carga mxima
2 kg
Peso
463 g
Voltaje
12 V
Dimensiones generales
Dimetro mximo
70 mm.
Longitud
110 mm
La mayora de las piezas del prototipo de la pinza se fabricaron por hidrocorte. Para el rotador se hicieron por
mecanizado convencional. Los engranajes para el rotador,
por tener un mdulo muy pequeo, no se pudieron rea-
10
Figura 8. Prtesis mdulo rotador, Proyecto 1-2003
REVISTA INGENIERA E INVESTIGACIN VOL. 26 No.3, DICIEMBRE DE 2006
El trabajo previo a la elaboracin del prototipo, la recopilacin bibliogrfica y los procesos de conceptualizacin del
producto, as como los diseos conceptual y preliminar,
son de gran importancia y toman gran cantidad de tiempo
y esfuerzo por parte del equipo de diseo.
Tras el trabajo realizado se pudo observar la importancia de
vincular personal multidiciplinario (mdicos e Ingenieros) y
la voz del profesional de la salud en el proceso de desarrollo
de un producto de aplicacin en rehabilitacin fsica.
En este trabajo se obtuvo un avance en el anlisis dinmico
de la pinza tridigital en conjunto, ya que no se encontr
despus del levantamiento bibliogrfico en el momento de
SNCHEZ, LOAIZA, CORTS
ser realizado el trabajo, anlisis cinemtico ni cintico para
este producto biomecnico como se consiguen para prtesis
de pie y simulaciones de marcha bpeda.
Agradecimientos
A la empresa Ortomac S.A. por el servicio que prestaron en
el corte de los engranajes del rotador, como aporte voluntario a esta investigacin.
Al ingeniero Miguel ngel Vega, por su colaboracin en la
solucin de problemas de diseo mecnico; al M.D. Octavio
Silva, por sus orientaciones en la parte de rehabilitacin
mdica.
A los magsteres en ingeniera de materiales y proceso
MSc. Ing. Erika Olaya, por su colaboracin en el logro de
la calidad y el manejo del programa QFD Capture; al MSc.
ing. Fernando Pacheco, por sus sugerencias en cuanto a los
procesos de manufactura del prototipo y por su colaboracin
en el proceso de ensamble.
Bibliografa
AKAO, Y., Despliegue de la funcin calidad: integracin
de Akao, Y., Despliegue de la Funcin Calidad: Integracin
de las Necesidades del Usuario en el Diseo del Producto.,
Japn, 1990.
Corts, L. y Nio L., Diseo de prtesis de miembro
superior 1. Parte estudio funcional del miembro superior.,
Proyecto de grado, Universidad Nacional de Colombia, para
optar por el ttulo de Ingeniero Mecnico, Bogot, 1997.
Snchez, C. M., Loaiza, J. L., Guevara, I. Corts C. J.
y Silva, O., Rediseo y construccin de prototipo de pinza
y rotador para Prtesis Mioelctrica de mano., Grupo de
investigacin en Biomecnica (GIBM UNCB), Informe
tcnico de Proyecto presentado al Departamento de Ingeniera Mecnica y Mecatrnica, Universidad Nacional
de Colombia - Bogot, para la asignatura de Diseo de
Mquinas, 2003.
Guzmn, D., Sistema mecnico para prtesis mioelctrica de mano., Informe Tcnico, perteneciente al GIBMUNCB, 2003
Nardin Frankel., Biomechanics Of The Musculoskeletal
System., 3dr Edition, Lippincott Williams And Willkins, 2001.
Norton, Robert., Diseo de mquinas., Ed. Prentice
Hall, 1995.
Olaya, E. S., Despliegue de Funcin Calidad (QFD)
Apoyado Mediante Lgica Difusa para Requerimientos de
Diseo de Prtesis Mioelctrica de Mano., Tesis de Maestra presentada a la Universidad Nacional de Colombia
Bogot, para optar por el ttulo de Magster en Ingeniera
Materiales y Procesos, 2003.
Schulz, S., Pylatiuk, C. and Bretthauer, G., A New Ultralight Anthropomorphic Hand., Institute Of Applied Computer
Science Research Center Of Karlsruhe, Germany, 2001.
De Vincenzo, C. V., Da Cunha, F. L., Schneebeli, H. A.,
Bastos, T. F. and Dynnikov V. I., Agent-Based Control Of
A Multifunction Mioelectric Prosthesis., Federal University
of Espirito Santo Annual EMBS International Conference,
Chicago IL, 2000.
Dario, P., Carrozza, M. C., Micera S., Massa B. and
Zecca Mitech, M., The Development of a Novel Biomechatronic Hand., Scuola Superiore SantAnna Lecture Notes in
Control and Information Sciences, Vol. 271, Experimental
Robotics VII, 2000, pp. 159 - 168 .
Alonso, A., Hornero Snchez, R., Espino Hurtado, P.,
Entrenador mioelctrico de prtesis para amputados de
brazo y mano., Mapfre Medicina, Vol. 13, No. 1, 2002,
pp. 11-19.
Franca, E.M., Ortolan, R.L., and Cunha, F. L., Dynnikov,V.
I., Cliquet Jr., Specific Control System for an Anthropomorphic Myoelectric Hand Prosthesis., In: J.M. Baltazar; P.B. Gonalves; R.M.F.L.R.F. Brasil; I.L. Caladas; F.B. Rizatto. (Org.),
Nonlinear Dynamics, Chaos, Control and Their Applications
to Engineering Sciences, Applications of Nonlinear Phenomena. Rio de Janeiro: ABCM, v. 6, 2002, pp. 356-365.
INTERNET
www.emedicine.com
www.ottobock.com
www.utaharm.com
www.oandp.org/jpo/library
www.amputee-coalition.org
http://www.armdynamics.com/spanish/
http://cosmos.buffalo.edu/
http://www.ortoinfo.com/
http://www.comunicacion.buap.mx/gaceta/2003/
gct61/pag_20.htm
http://www.smopac.org.mx/prosthetic/index.htm
REVISTA INGENIERA E INVESTIGACIN VOL. 26 No.3, DICIEMBRE DE 2006
11
You might also like
- Creas 2022Document31 pagesCreas 2022Lizeth Yossellin Retuerto ManuelNo ratings yet
- Actividad Del Mòdulo V Henry La HozDocument6 pagesActividad Del Mòdulo V Henry La HozHenry Michael La Hoz OzoriaNo ratings yet
- 1 Metodo DiaporematicoDocument20 pages1 Metodo DiaporematicoLaureano NavarroNo ratings yet
- HABADocument11 pagesHABASandra Caballero RamirezNo ratings yet
- Evaluación Primaria ATLSDocument13 pagesEvaluación Primaria ATLSJesús Torres MayaNo ratings yet
- Unidad 2. El PensamientoDocument18 pagesUnidad 2. El PensamientoAnthony MoraNo ratings yet
- 4to RM EdadesDocument3 pages4to RM EdadesOlavoRiveraNo ratings yet
- Ppi Total.Document21 pagesPpi Total.Luis AmbulayNo ratings yet
- Ejercicio 12 Fecha NacimientoDocument4 pagesEjercicio 12 Fecha Nacimientoapp meliusNo ratings yet
- PLANIFICACIÓN DE LA SESION DE APRENDIZAJE 2 Grado Unidad 4Document3 pagesPLANIFICACIÓN DE LA SESION DE APRENDIZAJE 2 Grado Unidad 4Edyll Dominguez cardenasNo ratings yet
- Sal U3 A2 EdchDocument14 pagesSal U3 A2 EdchAlejandra CervantesNo ratings yet
- Falencias en Planeamiento UrbanoDocument53 pagesFalencias en Planeamiento UrbanoCarlos Tinoco Lozano100% (1)
- Separación Sólido - LíquidoDocument10 pagesSeparación Sólido - LíquidoEnrique QuezadaNo ratings yet
- Estructura Externa Del Texto PersuasivoDocument2 pagesEstructura Externa Del Texto PersuasivoMay OMNo ratings yet
- Obstetricia (Resumen Pfo)Document18 pagesObstetricia (Resumen Pfo)Marcos CapoccettiNo ratings yet
- Preparador de ArtisticaDocument6 pagesPreparador de ArtisticaTiara AlexanderNo ratings yet
- Manual Usuario GAMMADocument46 pagesManual Usuario GAMMAJonathanNo ratings yet
- Cuestionario AlejandraDocument3 pagesCuestionario AlejandraAlexandra ParadaNo ratings yet
- Ensayo Final, Historia Del Patrimonio IIDocument19 pagesEnsayo Final, Historia Del Patrimonio IIMoisés Humberto Agredano VargasNo ratings yet
- Trabajo Grupal Estadisctica 2.0Document6 pagesTrabajo Grupal Estadisctica 2.0Juan Miguel Huamani VillafuerteNo ratings yet
- Tema 7. Esquemas - RatiosDocument32 pagesTema 7. Esquemas - RatiosJosep RodriguezNo ratings yet
- Marco Teórico Del Analisis y Creacion de Puesto.Document15 pagesMarco Teórico Del Analisis y Creacion de Puesto.Carmiush Condori MallquiNo ratings yet
- WWF o Fondo Mundial para La NaturalezaDocument4 pagesWWF o Fondo Mundial para La NaturalezasofiaNo ratings yet
- Diario de Doble EntradaDocument2 pagesDiario de Doble EntradaGabriel AvilaNo ratings yet
- Flexibilidad Verbal y RendimientoDocument5 pagesFlexibilidad Verbal y RendimientopmartinrNo ratings yet
- Modelo de Derivación A Orientación EscolarDocument3 pagesModelo de Derivación A Orientación EscolarEsteban De JesusNo ratings yet
- Proyecto de La Palabra A La ImagenDocument2 pagesProyecto de La Palabra A La ImagenMarina TarnovskyNo ratings yet
- T5 CTVDocument9 pagesT5 CTVJefferson ChipantizaNo ratings yet
- Reflexiones Sobre La Responsabilidad Social Como Estrategia Empresarial.Document7 pagesReflexiones Sobre La Responsabilidad Social Como Estrategia Empresarial.Leo Salas ZNo ratings yet
- Formato Pae IntegralDocument23 pagesFormato Pae IntegralYuvis NeyraNo ratings yet