You might also like
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Material Science - CompressedDocument82 pagesMaterial Science - CompressedMatthew SmithNo ratings yet
- C 20 MTT 1 2 SemDocument165 pagesC 20 MTT 1 2 SemMatthew SmithNo ratings yet
- Time Management Conference 2019Document28 pagesTime Management Conference 2019Matthew SmithNo ratings yet
- C 20 MY 3 4 SemDocument80 pagesC 20 MY 3 4 SemMatthew SmithNo ratings yet
- Combustion in Si EnginesDocument36 pagesCombustion in Si Enginesrgopi_83No ratings yet
- Combustion PDFDocument24 pagesCombustion PDFserkalemtNo ratings yet
- Maths 3 CompressedDocument208 pagesMaths 3 CompressedMatthew SmithNo ratings yet
- Application of Taguchi Method For Optimization of Process Parameters in Improving The Surface Roughness of Lathe Facing OperationDocument7 pagesApplication of Taguchi Method For Optimization of Process Parameters in Improving The Surface Roughness of Lathe Facing Operationwww.irjes.comNo ratings yet
- Front-Wheel-Drive (Transaxle and CV Joint) Fundamentals: © 2012 Delmar, Cengage LearningDocument25 pagesFront-Wheel-Drive (Transaxle and CV Joint) Fundamentals: © 2012 Delmar, Cengage LearningMatthew SmithNo ratings yet
- 1 s2.0 S0263822315005164 MainDocument22 pages1 s2.0 S0263822315005164 MainMatthew SmithNo ratings yet
- 6Rph6Wxglhv RQ 0hfkdqlfdo 3urshuwlhv Ri (SR (/&7%1&od/ %Dvhg3Ro/Phu 1Dqrfrpsrvlwhv 31&Document8 pages6Rph6Wxglhv RQ 0hfkdqlfdo 3urshuwlhv Ri (SR (/&7%1&od/ %Dvhg3Ro/Phu 1Dqrfrpsrvlwhv 31&Matthew SmithNo ratings yet
- Influence of Interface On Epoxy/clay Nanocomposites: 1. Morphology StructureDocument6 pagesInfluence of Interface On Epoxy/clay Nanocomposites: 1. Morphology StructureMatthew SmithNo ratings yet
- 10 1 1 558 3354Document12 pages10 1 1 558 3354Matthew SmithNo ratings yet
- Abst PHD EnotiadisDocument2 pagesAbst PHD EnotiadisMatthew SmithNo ratings yet
- 1 s2.0 S2211812814005872 MainDocument7 pages1 s2.0 S2211812814005872 MainMatthew SmithNo ratings yet
- Study of Friction and Wear of ABS/Zno Polymer Composite Using Taguchi TechniqueDocument10 pagesStudy of Friction and Wear of ABS/Zno Polymer Composite Using Taguchi TechniqueMatthew SmithNo ratings yet
- 813201113306Document10 pages813201113306Matthew SmithNo ratings yet
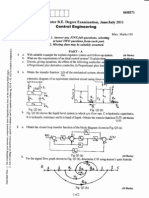
- CE June 2011Document2 pagesCE June 2011sohan2902No ratings yet
- Basic Thermo 3Document65 pagesBasic Thermo 3Matthew SmithNo ratings yet
- BTD - QBDocument25 pagesBTD - QBMatthew SmithNo ratings yet
- FM II AssaignmentDocument2 pagesFM II AssaignmentMatthew SmithNo ratings yet
- Automatic Transmission SystemDocument21 pagesAutomatic Transmission SystemMamesh Mathankar100% (1)
- Fluid Mechanics Question Paper December 2014 January 2015Document2 pagesFluid Mechanics Question Paper December 2014 January 2015Matthew SmithNo ratings yet
- Describe The Construction and Operation of Manual and Semi-Automatic Transmissions Used On Light VehiclesDocument3 pagesDescribe The Construction and Operation of Manual and Semi-Automatic Transmissions Used On Light VehiclesMatthew SmithNo ratings yet
- 1 PBDocument8 pages1 PBMatthew SmithNo ratings yet
- Automobile EnginesDocument86 pagesAutomobile EnginesMatthew SmithNo ratings yet
- Automatic Transmission ApplicationsDocument26 pagesAutomatic Transmission ApplicationsMatthew SmithNo ratings yet
- Automatic Transmission SystemDocument21 pagesAutomatic Transmission SystemMamesh Mathankar100% (1)
- 1 PBDocument8 pages1 PBMatthew SmithNo ratings yet
- Types of Chassis LayoutDocument8 pagesTypes of Chassis LayoutMatthew SmithNo ratings yet
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (895)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (400)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (588)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (121)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- Status Report Rinnen Foreuse C9 MBD08641 La Totale - PSRPT - 2021-07-20 - 14.03.53Document4 pagesStatus Report Rinnen Foreuse C9 MBD08641 La Totale - PSRPT - 2021-07-20 - 14.03.53Jean DiscretNo ratings yet
- IR5000 6000trDocument107 pagesIR5000 6000trjuli_naz100% (1)
- How To Make A CRT TV Into An OscilloscopeDocument10 pagesHow To Make A CRT TV Into An OscilloscopeNusret YılmazNo ratings yet
- Arctic Cat 2008 DVX Utility 250 Service ManualDocument10 pagesArctic Cat 2008 DVX Utility 250 Service Manualbonnie100% (42)
- Microcontrollers and Embedded Systems Unit 2:8051 ProgrammingDocument6 pagesMicrocontrollers and Embedded Systems Unit 2:8051 ProgrammingKyly BlueNo ratings yet
- NOM 003 SCFI 2014 Electrical Products Safety RequirementsDocument6 pagesNOM 003 SCFI 2014 Electrical Products Safety Requirements2357131270No ratings yet
- Auto Crane 5005H User ManualDocument98 pagesAuto Crane 5005H User ManualJim RNo ratings yet
- New NC Report FormatDocument24 pagesNew NC Report FormatNitish SinghNo ratings yet
- Isuzu Diesel EngineDocument43 pagesIsuzu Diesel EngineKin Arvin PelagioNo ratings yet
- Pt. Rahmi Ida Nusantara: Sumbagut-2 Peaker Power Plant (Electrical)Document20 pagesPt. Rahmi Ida Nusantara: Sumbagut-2 Peaker Power Plant (Electrical)Andri WahyudiNo ratings yet
- HC110Document13 pagesHC110rustamriyadiNo ratings yet
- MegneticDocument7 pagesMegneticweiwanchengsxgNo ratings yet
- Battery Charge Management: bq24160, bq24161, bq24162Document1 pageBattery Charge Management: bq24160, bq24161, bq24162wilsonNo ratings yet
- Etp, Boq - AaaDocument8 pagesEtp, Boq - Aaagnbuildtech Pvt ltdNo ratings yet
- B8 - A5 - ABS System - Electrical Flow Diagram - From June 2007Document8 pagesB8 - A5 - ABS System - Electrical Flow Diagram - From June 2007Divakaran VaradarajaluNo ratings yet
- Traco CablesDocument7 pagesTraco CablesRetheesh NarayananNo ratings yet
- Pulsar Analogue Quartz Watch With Alarm Chronograph Timer: Modes and Displays C A L - N 9 4 4, N 9 4 5 FeaturesDocument13 pagesPulsar Analogue Quartz Watch With Alarm Chronograph Timer: Modes and Displays C A L - N 9 4 4, N 9 4 5 FeaturesAnas IbrahimNo ratings yet
- Swing Motor PW200 220-7Document7 pagesSwing Motor PW200 220-7Teknik Makina100% (1)
- Thermo OrionDocument2 pagesThermo Orionhdabc123No ratings yet
- Corvette c3 Catalogo-CompletoDocument236 pagesCorvette c3 Catalogo-CompletoSimone MaranoNo ratings yet
- J-1480 Mastercopy Spare PartsDocument163 pagesJ-1480 Mastercopy Spare PartsbrunoNo ratings yet
- Dp1100i t3 Specification Sheet EnglishDocument4 pagesDp1100i t3 Specification Sheet EnglishRAFTAMA JAYA ABADINo ratings yet
- MT6768 (SBS) : MT6177M (LWG+LTG)Document31 pagesMT6768 (SBS) : MT6177M (LWG+LTG)pc partnerNo ratings yet
- Total Flow XRC G4 Manual PDFDocument168 pagesTotal Flow XRC G4 Manual PDFIgnacio CatalanNo ratings yet
- High-Efficiency Inverter Controller: FeaturesDocument7 pagesHigh-Efficiency Inverter Controller: Featureszigmund zigmundNo ratings yet
- FN SDFDocument21 pagesFN SDFArun KumarNo ratings yet
- Manual ZB2L3-Medidor Capacidad BateriaDocument2 pagesManual ZB2L3-Medidor Capacidad BateriaPetérNo ratings yet
- Crowtail Starter Kit For Micro Bit User ManualDocument23 pagesCrowtail Starter Kit For Micro Bit User ManualJohn WestNo ratings yet
- Manual Balanceadora HunterDocument19 pagesManual Balanceadora HunterAriel MercochaNo ratings yet
- 742RDocument19 pages742Rj31ocNo ratings yet