You might also like
- (2016 PEDSTC, Iran) # HosseinzadehDocument7 pages(2016 PEDSTC, Iran) # HosseinzadehSherif M. DabourNo ratings yet
- ArafatMN - Dis (Final Comments 4)Document317 pagesArafatMN - Dis (Final Comments 4)Sherif M. DabourNo ratings yet
- IEEE Transactions On Industry Applications Volume 47 Issue 6 2011 (Doi 10.1109/tia.2011.2170101) Muetze, A. Sullivan, C.R. - Simplified Design of Common-Mode Chokes For Reduction of Motor Ground CDocument8 pagesIEEE Transactions On Industry Applications Volume 47 Issue 6 2011 (Doi 10.1109/tia.2011.2170101) Muetze, A. Sullivan, C.R. - Simplified Design of Common-Mode Chokes For Reduction of Motor Ground CSherif M. DabourNo ratings yet
- New Generator Static Excitation: Using Boost-Buck ChopperDocument6 pagesNew Generator Static Excitation: Using Boost-Buck ChopperSherif M. DabourNo ratings yet
- UntitledDocument8 pagesUntitledSherif M. DabourNo ratings yet
- Terms and ConditionsDocument2 pagesTerms and ConditionsSherif M. DabourNo ratings yet
- SEMIKRON Article No Need For External Sensors en 2016-05-01Document5 pagesSEMIKRON Article No Need For External Sensors en 2016-05-01Sherif M. DabourNo ratings yet
- Elvira Baygildina A4Document153 pagesElvira Baygildina A4Sherif M. DabourNo ratings yet
- Lee ThesisDocument173 pagesLee ThesisSherif M. DabourNo ratings yet
- Terms and ConditionsDocument2 pagesTerms and ConditionsSherif M. DabourNo ratings yet
- 08048414Document11 pages08048414Sherif M. DabourNo ratings yet
- 6086497 (2)Document11 pages6086497 (2)Sherif M. DabourNo ratings yet
- T FM Fern Do Jesus Garcia Diaz RuoDocument46 pagesT FM Fern Do Jesus Garcia Diaz RuoHồ Minh HớiNo ratings yet
- STDF-IFE Call 5 Application FormDocument5 pagesSTDF-IFE Call 5 Application FormSherif M. DabourNo ratings yet
- New Text DocumentDocument1 pageNew Text DocumentSherif M. DabourNo ratings yet
- Koubo20170818 PeeDocument1 pageKoubo20170818 PeeSherif M. DabourNo ratings yet
- DC-Bus Utilisation in Series-Connected Multi-Phase Machines Supplied From A VSI With A Composite Phase NumberDocument6 pagesDC-Bus Utilisation in Series-Connected Multi-Phase Machines Supplied From A VSI With A Composite Phase NumberSherif M. DabourNo ratings yet
- Koubo20170818 PeeDocument1 pageKoubo20170818 PeeSherif M. DabourNo ratings yet
- DC-Bus Utilisation in Series-Connected Multi-Phase Machines Supplied From A VSI With A Composite Phase NumberDocument6 pagesDC-Bus Utilisation in Series-Connected Multi-Phase Machines Supplied From A VSI With A Composite Phase NumberSherif M. DabourNo ratings yet
- IEEE Transactions On Energy Conversion Volume 14 Issue 1 1999 (Doi 10.1109 - 60.749146) Levi, E. - Saturation Modelling in D-Q Axis Models of Salient Pole Synchronous MachinesDocument7 pagesIEEE Transactions On Energy Conversion Volume 14 Issue 1 1999 (Doi 10.1109 - 60.749146) Levi, E. - Saturation Modelling in D-Q Axis Models of Salient Pole Synchronous MachinesSherif M. DabourNo ratings yet
- 17 Chapter 7Document52 pages17 Chapter 7Sherif M. DabourNo ratings yet
- Untitled 2Document10 pagesUntitled 2Sherif M. DabourNo ratings yet
- A Five-Phase Multilevel Space-Vector PWM Algorithm For A Dual-Inverter Supplied DriveDocument6 pagesA Five-Phase Multilevel Space-Vector PWM Algorithm For A Dual-Inverter Supplied DriveSherif M. DabourNo ratings yet
- Session5h PDFDocument8 pagesSession5h PDFSherif M. DabourNo ratings yet
- (Doi 10.1109 - Iecon.2013.6699976) Che, H.S. Jones, M. Levi, E. Riveros, J.A. Bogado, B. Barre - (IEEE IECON 2013 - 39th Annual Conference of The IEEE Industrial Electronics Society - Vienna, AuDocument6 pages(Doi 10.1109 - Iecon.2013.6699976) Che, H.S. Jones, M. Levi, E. Riveros, J.A. Bogado, B. Barre - (IEEE IECON 2013 - 39th Annual Conference of The IEEE Industrial Electronics Society - Vienna, AuSherif M. DabourNo ratings yet
- Xpaper 05Document10 pagesXpaper 05Sherif M. DabourNo ratings yet
- (Doi 10.1109 - 61.544289) R. Mancini Z. Zabar L. Birenbaum E. Levi J. Hajagos S. Kali - An Area Substation Load Model in The Presence of HarmonicsDocument7 pages(Doi 10.1109 - 61.544289) R. Mancini Z. Zabar L. Birenbaum E. Levi J. Hajagos S. Kali - An Area Substation Load Model in The Presence of HarmonicsSherif M. DabourNo ratings yet
- A Novel Six-Phase Series-Connected Two-Motor Drive With Decoupled Dynamic ControlDocument8 pagesA Novel Six-Phase Series-Connected Two-Motor Drive With Decoupled Dynamic ControlSherif M. DabourNo ratings yet
- (Doi 10.1049 - cp.2014.0482) Levi, E. Che, H.S. Gonzalez, I. Aguado, J. Duran, M.J. - (Institution of Engineering and Technology 7th IET International Conference On Power Electronics, Machines AnDocument6 pages(Doi 10.1049 - cp.2014.0482) Levi, E. Che, H.S. Gonzalez, I. Aguado, J. Duran, M.J. - (Institution of Engineering and Technology 7th IET International Conference On Power Electronics, Machines AnSherif M. DabourNo ratings yet
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (587)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (894)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (399)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (73)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2219)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (265)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (119)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- Design Procedure of A Push Pull Current-Fed DC-DCDocument8 pagesDesign Procedure of A Push Pull Current-Fed DC-DCIhya UlumuddinNo ratings yet
- Modeling and Analysis of Very Fast Transient Overvoltages in 400 KV GISDocument5 pagesModeling and Analysis of Very Fast Transient Overvoltages in 400 KV GISmohamad akbariNo ratings yet
- CMS Physics Investigatory ProjectDocument12 pagesCMS Physics Investigatory Projectbiswajitdutta05sep0% (1)
- IET Circuits Devices Syst - 2016 - Ayachit - Transfer Functions of A Transformer at Different Values of CouplingDocument12 pagesIET Circuits Devices Syst - 2016 - Ayachit - Transfer Functions of A Transformer at Different Values of CouplingVlad AlexNo ratings yet
- Ferroresonance and Its CausesDocument10 pagesFerroresonance and Its CauseselectrificatorbbbNo ratings yet
- Eim Exp 7 8 Schering OwenDocument8 pagesEim Exp 7 8 Schering Owensaksham guptaNo ratings yet
- SAMPLE PAPER 3 QuestionDocument21 pagesSAMPLE PAPER 3 QuestionmuthuNo ratings yet
- LTspiceGettingStartedGuide PDFDocument53 pagesLTspiceGettingStartedGuide PDFRichard ZerpaNo ratings yet
- DC Chopper FundamentalsDocument77 pagesDC Chopper FundamentalsyogitaNo ratings yet
- Troubleshooting electric lift truck error codesDocument6 pagesTroubleshooting electric lift truck error codesbibhuti bhusan routNo ratings yet
- Vidya Pratishthan’s College of Engineering MCQs on Basic Electrical EngineeringDocument13 pagesVidya Pratishthan’s College of Engineering MCQs on Basic Electrical Engineeringshubha christopherNo ratings yet
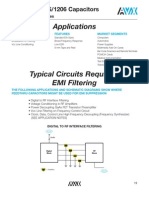
- Applications: Feedthru 0805/1206 CapacitorsDocument6 pagesApplications: Feedthru 0805/1206 CapacitorspblhnrqNo ratings yet
- Equivalent Circuit of The Loop Antenna. The Small Loop As A Receiving Antenna. Ferrite Loops.)Document20 pagesEquivalent Circuit of The Loop Antenna. The Small Loop As A Receiving Antenna. Ferrite Loops.)Kamaraj PandianNo ratings yet
- Electronic Door Lock1Document26 pagesElectronic Door Lock1smahesh_1980No ratings yet
- Wireless Power Transmission Seminar Report 2019Document35 pagesWireless Power Transmission Seminar Report 2019MAHENDRA KUMAR100% (7)
- Choppers & Ac ControllersDocument28 pagesChoppers & Ac Controllersves vegasNo ratings yet
- ANNA UNIVERSITY PART TIME ECE CURRICULUMDocument167 pagesANNA UNIVERSITY PART TIME ECE CURRICULUMganathippu1No ratings yet
- Measuring Coaxial Cable Impedance Using Oscilloscope To Analyze WaveformDocument24 pagesMeasuring Coaxial Cable Impedance Using Oscilloscope To Analyze WaveformlufrasaNo ratings yet
- 120 Days CountdownDocument6 pages120 Days CountdownApuNo ratings yet
- Piece-Wise Linear Electrical Circuit SimulationDocument478 pagesPiece-Wise Linear Electrical Circuit SimulationphieuxuatkhoNo ratings yet
- GenRad - Experimenter - Nov - 1952 Inductor Resonance and GR 1482 Standard InductorsDocument8 pagesGenRad - Experimenter - Nov - 1952 Inductor Resonance and GR 1482 Standard InductorsBill AlbertNo ratings yet
- Transformer Isolated Gate DriveDocument9 pagesTransformer Isolated Gate DriverobertdenchNo ratings yet
- EE8251 IQ 2marksDocument44 pagesEE8251 IQ 2markspriya dharshiniNo ratings yet
- Mariusz MalinowskiDocument128 pagesMariusz Malinowskiahmadusman123No ratings yet
- 4634 Lectures Labs 1 11 1Document212 pages4634 Lectures Labs 1 11 1Tiago Nunes0% (2)
- Interpretation of Transformer FRA Responses - Part II: Influence of Transformer StructureDocument8 pagesInterpretation of Transformer FRA Responses - Part II: Influence of Transformer StructureErfan AhmedNo ratings yet
- Chap 6 - Grounding and ShieldingDocument19 pagesChap 6 - Grounding and ShieldingShashesh Silwal50% (2)
- PCB Ibm PDFDocument408 pagesPCB Ibm PDFFelipe AndinoNo ratings yet
- CKP Notes Vol 2 VERSION 2Document116 pagesCKP Notes Vol 2 VERSION 2Sivasankar AkcNo ratings yet
- Universiti Teknologi Mara Final Examination: Confidential AS/OCT 2010/PHY150Document11 pagesUniversiti Teknologi Mara Final Examination: Confidential AS/OCT 2010/PHY150Immoral FlowerNo ratings yet