You might also like
- Alta Luis Alberto CangalayaDocument2 pagesAlta Luis Alberto CangalayaChristianChávezRodríguezNo ratings yet
- Certificado de Calibración #T-3393-2020Document2 pagesCertificado de Calibración #T-3393-2020ChristianChávezRodríguezNo ratings yet
- Reportando e Investigando "Cuasi Accidentes"Document1 pageReportando e Investigando "Cuasi Accidentes"ChristianChávezRodríguezNo ratings yet
- Alta Ditmar FloresDocument2 pagesAlta Ditmar FloresChristianChávezRodríguezNo ratings yet
- Reporte Tareos ConsolidadoDocument6,104 pagesReporte Tareos ConsolidadoChristianChávezRodríguezNo ratings yet
- No Registraron Su TamiDocument8 pagesNo Registraron Su TamiChristianChávezRodríguezNo ratings yet
- GyM K172 - Formato de Observaciones - 2021-05-10 - CompressedDocument5 pagesGyM K172 - Formato de Observaciones - 2021-05-10 - CompressedChristianChávezRodríguezNo ratings yet
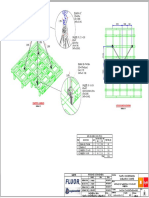
- Plano 1Document1 pagePlano 1ChristianChávezRodríguezNo ratings yet
- Uso de Aisladores y Disipadores en EstructurasDocument190 pagesUso de Aisladores y Disipadores en EstructurasYIN QUISPE ARONES0% (1)
- PROC OTI1900039 018 - 0 D - TorquePlateworksDocument23 pagesPROC OTI1900039 018 - 0 D - TorquePlateworksChristianChávezRodríguezNo ratings yet
- Pistola Classic LuxDocument2 pagesPistola Classic LuxChristianChávezRodríguezNo ratings yet
- Copia de Copia de Reporte Seguridad 11-06-21 (Molino Bolas 2)Document2 pagesCopia de Copia de Reporte Seguridad 11-06-21 (Molino Bolas 2)ChristianChávezRodríguezNo ratings yet
- Reporte TareosDocument1 pageReporte TareosChristianChávezRodríguezNo ratings yet
- K CC3-172 - GyM - PIN - DART - 08.08.21Document2 pagesK CC3-172 - GyM - PIN - DART - 08.08.21ChristianChávezRodríguezNo ratings yet
- Plano 2Document1 pagePlano 2ChristianChávezRodríguezNo ratings yet
- Certificado de Calibración #T-3393-2020Document2 pagesCertificado de Calibración #T-3393-2020ChristianChávezRodríguezNo ratings yet
- Grupo 12 - Personal Considerado Subida ExpressDocument1 pageGrupo 12 - Personal Considerado Subida ExpressChristianChávezRodríguezNo ratings yet
- Operacion Puentes GruaDocument19 pagesOperacion Puentes GruaChristianChávezRodríguezNo ratings yet
- Certificado de Calibración #T-3393-2020Document2 pagesCertificado de Calibración #T-3393-2020ChristianChávezRodríguezNo ratings yet
- La Norma PAS 55 (Publicly Available Specification)Document3 pagesLa Norma PAS 55 (Publicly Available Specification)Preditec/IRMNo ratings yet
- 2 Desarrollo Teorico PDF 3 v2Document21 pages2 Desarrollo Teorico PDF 3 v2ChristianChávezRodríguezNo ratings yet
- Reportando e Investigando "Cuasi Accidentes"Document1 pageReportando e Investigando "Cuasi Accidentes"ChristianChávezRodríguezNo ratings yet
- CM-PG-SSO-04-F2 Evaluacion AST - Rev0Document1 pageCM-PG-SSO-04-F2 Evaluacion AST - Rev0ChristianChávezRodríguezNo ratings yet
- Sem3 Caso El Grupo SandovalDocument7 pagesSem3 Caso El Grupo SandovalChristianChávezRodríguezNo ratings yet
- Luis Tesis Maestria 2016Document66 pagesLuis Tesis Maestria 2016ChristianChávezRodríguezNo ratings yet
- Gestión de La ProducciónDocument19 pagesGestión de La ProducciónKellyMejíaVillanuevaNo ratings yet
- Pas 55Document11 pagesPas 55Aydee Aranguren100% (1)
- FormatoDocument13 pagesFormatoChristianChávezRodríguezNo ratings yet
- 2 Desarrollo Teorico PDF 4 v2 PDFDocument14 pages2 Desarrollo Teorico PDF 4 v2 PDFChristianChávezRodríguezNo ratings yet
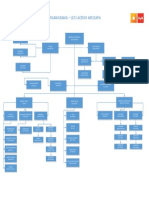
- Organigrama Proyecto Al 18.01Document1 pageOrganigrama Proyecto Al 18.01ChristianChávezRodríguez67% (3)
- Inteligencia ArtificialDocument40 pagesInteligencia ArtificialAtilin Maltez100% (1)
- Lenguaje 7Document5 pagesLenguaje 7MaYita AndraDe0% (1)
- IA MultimodalDocument2 pagesIA MultimodalrojasperezjoaquinliNo ratings yet
- NOM-010-SCFI-1994 28 de Febrero de 2018 PDFDocument169 pagesNOM-010-SCFI-1994 28 de Febrero de 2018 PDFEric Rojas SanchezNo ratings yet
- Control PID DiscretoDocument12 pagesControl PID Discretorolando ojedaNo ratings yet
- Algoritmo Del Machine LearningDocument4 pagesAlgoritmo Del Machine LearningPedro 19-EIST-1-082No ratings yet
- Signos Símbolos, Indicios, ÍconosDocument4 pagesSignos Símbolos, Indicios, ÍconosLuis Barrientos EscobarNo ratings yet
- PerceptronDocument2 pagesPerceptronAndres Morales DelgadoNo ratings yet
- La ComunicaciónDocument74 pagesLa Comunicaciónmarcos25% (4)
- Plan Global Dinamica de SistemasDocument5 pagesPlan Global Dinamica de SistemasDianaNo ratings yet
- Bases de Datos 2 Tarea 3Document7 pagesBases de Datos 2 Tarea 3Estefania Rodriguez SanchezNo ratings yet
- Pregunta 2Document7 pagesPregunta 2Kevin Andrés AmayaNo ratings yet
- Resumen para Derecho Informático 1Document43 pagesResumen para Derecho Informático 1Manuela ReNo ratings yet
- Evolución de La Robotica-Linea Del TiempoDocument5 pagesEvolución de La Robotica-Linea Del TiempoLuis Vazquez60% (5)
- 1.2 Conceptos y TecnicasDocument7 pages1.2 Conceptos y TecnicasJuan Carlos AlcazarNo ratings yet
- Machine LearningDocument2 pagesMachine LearningEdgard ChavzNo ratings yet
- Guia de Lectura para Gregory Bateson y La Sistémica, La Cibernética y La InformáticaDocument1 pageGuia de Lectura para Gregory Bateson y La Sistémica, La Cibernética y La InformáticaAntonio Doval BorthagarayNo ratings yet
- Introducción A La Lingüística. Lenguaje - Lengua.Document32 pagesIntroducción A La Lingüística. Lenguaje - Lengua.antonio perezNo ratings yet
- Delicia Aurora PoloDocument20 pagesDelicia Aurora PoloAyni WasiNo ratings yet
- Trabajo TAE 1Document5 pagesTrabajo TAE 1Luis Gabriel Rojas VivancoNo ratings yet
- Informe Deep LearningDocument15 pagesInforme Deep LearningEngel Luna CaldNo ratings yet
- INDICEDocument6 pagesINDICELis BaldeonNo ratings yet
- Comunicación Oral - StevenDocument16 pagesComunicación Oral - Stevenangelog1989No ratings yet
- 2.cibercultura TeoríasDocument23 pages2.cibercultura TeoríasGabo CevallosNo ratings yet
- Tecnologia IndustrialDocument6 pagesTecnologia IndustrialWILMER CRUZ DIAZNo ratings yet
- Cédula Sumaria. Auditoria IIDocument6 pagesCédula Sumaria. Auditoria IIRosindy RamirezNo ratings yet
- Principios de La RoboticaDocument2 pagesPrincipios de La RoboticaCarlos MadrigalNo ratings yet
- Aprendemos y Creamos RimasDocument8 pagesAprendemos y Creamos RimasJUAN88% (8)
- Programa Diplomado NoviembreDocument3 pagesPrograma Diplomado NoviembreAlexander Saravia AndiaNo ratings yet
- Etn 702Document8 pagesEtn 702MarcosNo ratings yet