You might also like
- Why Industrial Bearings Fail: Analysis, Maintenance, and PreventionFrom EverandWhy Industrial Bearings Fail: Analysis, Maintenance, and PreventionNo ratings yet
- Journal Bearing LubricationDocument5 pagesJournal Bearing LubricationYorman Hernandez100% (1)
- Understanding Journal BearingsDocument26 pagesUnderstanding Journal BearingsΡαφαηλ Καμ.100% (1)
- Troubleshooting Rotating Machinery: Including Centrifugal Pumps and Compressors, Reciprocating Pumps and Compressors, Fans, Steam Turbines, Electric Motors, and MoreFrom EverandTroubleshooting Rotating Machinery: Including Centrifugal Pumps and Compressors, Reciprocating Pumps and Compressors, Fans, Steam Turbines, Electric Motors, and MoreNo ratings yet
- TilTing Pad Radial BeaRings PDFDocument28 pagesTilTing Pad Radial BeaRings PDFmrbookaniNo ratings yet
- Tilting Pad Bearing PreloadDocument3 pagesTilting Pad Bearing Preloadrafay0saeed100% (2)
- Thrust Bearing End PlayDocument3 pagesThrust Bearing End PlayKrishnan SanthanarajNo ratings yet
- Bearing Installation ProcedureDocument6 pagesBearing Installation ProcedureHamad KhaledNo ratings yet
- BearingDocument41 pagesBearingM.IBRAHEEMNo ratings yet
- Vibration Basics and Machine Reliability Simplified : A Practical Guide to Vibration AnalysisFrom EverandVibration Basics and Machine Reliability Simplified : A Practical Guide to Vibration AnalysisRating: 4 out of 5 stars4/5 (2)
- Oil Whirl in Floating Ring SealsDocument11 pagesOil Whirl in Floating Ring SealsMuhammad Irfan AnwarNo ratings yet
- Maintenance of Journal (Babbitt) BearingsDocument34 pagesMaintenance of Journal (Babbitt) BearingsNilav KumarNo ratings yet
- Lubrication: A Practical Guide to Lubricant SelectionFrom EverandLubrication: A Practical Guide to Lubricant SelectionRating: 5 out of 5 stars5/5 (3)
- Hydrodynamic Journal BearingDocument5 pagesHydrodynamic Journal Bearing113314100% (1)
- Babbitted Bearing Health AssessmentDocument18 pagesBabbitted Bearing Health AssessmentSomen MukherjeeNo ratings yet
- Case Study Analysis Planetary Gearbox Sept 5 2006Document12 pagesCase Study Analysis Planetary Gearbox Sept 5 2006lorindal100% (3)
- Bearing Failures - PresentationDocument13 pagesBearing Failures - PresentationMaintenance CircleNo ratings yet
- Forsthoffer’s Component Condition MonitoringFrom EverandForsthoffer’s Component Condition MonitoringRating: 4 out of 5 stars4/5 (2)
- Gearbox ReliabilityDocument63 pagesGearbox ReliabilityPIRATASANTANA100% (2)
- Ultrasound Analysis for Condition Monitoring: Applications of Ultrasound Detection for Various Industrial EquipmentFrom EverandUltrasound Analysis for Condition Monitoring: Applications of Ultrasound Detection for Various Industrial EquipmentRating: 4.5 out of 5 stars4.5/5 (3)
- Shaft Alignment: A Training HandbookDocument13 pagesShaft Alignment: A Training HandbookBruno Gonzalez0% (1)
- Generator Magnetic CenterDocument3 pagesGenerator Magnetic CenterSreekanthMylavarapuNo ratings yet
- Tilting Pad Journal Bearings: Principles of OperationDocument18 pagesTilting Pad Journal Bearings: Principles of OperationZeeshan Sajid100% (2)
- Bearings: A Tribology HandbookFrom EverandBearings: A Tribology HandbookM. J. NealeRating: 3 out of 5 stars3/5 (8)
- Babbitted Bearing Health AssessmentDocument15 pagesBabbitted Bearing Health AssessmentZeeshan AnwarNo ratings yet
- Is My Machine OK?: A Field Guide to Assessing Process MachineryFrom EverandIs My Machine OK?: A Field Guide to Assessing Process MachineryNo ratings yet
- The Repair of Induction MotorsDocument50 pagesThe Repair of Induction MotorsAngel Gutierrez0% (1)
- Practical Machinery Vibration Analysis and Predictive MaintenanceFrom EverandPractical Machinery Vibration Analysis and Predictive MaintenanceRating: 4.5 out of 5 stars4.5/5 (10)
- Failure Analysis of BearingsDocument14 pagesFailure Analysis of Bearingsmaidul.islam100% (2)
- Rolling Bearing Tribology: Tribology and Failure Modes of Rolling Element BearingsFrom EverandRolling Bearing Tribology: Tribology and Failure Modes of Rolling Element BearingsNo ratings yet
- Shaft AlignmentDocument44 pagesShaft Alignmentrodolfosti100% (1)
- SKF Bearing Failure and CausesDocument44 pagesSKF Bearing Failure and CausescazacuphNo ratings yet
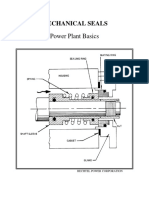
- Mechanical Seals: Power Plant BasicsDocument26 pagesMechanical Seals: Power Plant BasicsService Port100% (1)
- Runout Mecanico y ElectricoDocument6 pagesRunout Mecanico y ElectricoJuan Pablo Chumba LaraNo ratings yet
- Pressure Dam Bearings USEFULDocument16 pagesPressure Dam Bearings USEFULAmna Chaudary100% (1)
- 5000 KW Gearbox High Pinion Bearing Temperatures 1644227029Document7 pages5000 KW Gearbox High Pinion Bearing Temperatures 1644227029MC ANo ratings yet
- Bearing FitsDocument9 pagesBearing Fitstaekwangkim4907No ratings yet
- Centrifugal Pump OverloadingDocument2 pagesCentrifugal Pump OverloadingAbdul AlimNo ratings yet
- Thrust Bearing Manual PDFDocument28 pagesThrust Bearing Manual PDFAkarshan SoodNo ratings yet
- Symptoms Causes Remedies: Rolling Bearing DamageDocument1 pageSymptoms Causes Remedies: Rolling Bearing Damageemad sabriNo ratings yet
- FAG Failure Diagnosis PC en PDFDocument28 pagesFAG Failure Diagnosis PC en PDFLeire MeigaNo ratings yet
- FAG Rolling Bearing LubricationDocument69 pagesFAG Rolling Bearing LubricationSam ChengNo ratings yet
- Sleeve Bearing Diagnostics R1Document75 pagesSleeve Bearing Diagnostics R1Daniel_Ali_bNo ratings yet
- How To Analyze Gear FailuresDocument6 pagesHow To Analyze Gear FailuresHossein100% (1)
- Factor of Alignment-PDocument12 pagesFactor of Alignment-Pvinothenergy100% (1)
- Tilt Pad BRGDocument3 pagesTilt Pad BRGmaidul.islam100% (1)
- Tilting Pad Journal Bearings High Speed High LoadDocument11 pagesTilting Pad Journal Bearings High Speed High LoadHatem AliNo ratings yet
- Examples of Balancing Method - Four-Run and Least-Squares Influence CoefficientsDocument44 pagesExamples of Balancing Method - Four-Run and Least-Squares Influence CoefficientsNguyen Anh TuNo ratings yet
- Journal Bearing ClearanceDocument2 pagesJournal Bearing ClearanceLookman FajarNo ratings yet
- System Natural Frequency Change by Changing MassDocument2 pagesSystem Natural Frequency Change by Changing MassThiMinhKhuyenNo ratings yet
- Bearing MaintenanceDocument34 pagesBearing MaintenanceThiMinhKhuyenNo ratings yet
- A Review of Aerodynamically Induced Forces Acting On Centrifugal Compressors, and Resulting Vibration Characteristics of RotorsDocument18 pagesA Review of Aerodynamically Induced Forces Acting On Centrifugal Compressors, and Resulting Vibration Characteristics of RotorsThiMinhKhuyenNo ratings yet
- Effects of Misalignment & The Benefits of Precision Shaft AlignmentDocument40 pagesEffects of Misalignment & The Benefits of Precision Shaft AlignmentThiMinhKhuyenNo ratings yet
- Flowserve SealDocument71 pagesFlowserve SealThiMinhKhuyen100% (2)
- VibrationAnalysisOfRotatingEquipment CaMauDocument69 pagesVibrationAnalysisOfRotatingEquipment CaMauThiMinhKhuyenNo ratings yet
- Library SectionsDocument4 pagesLibrary SectionsGello Sotnuiq100% (4)
- Compuware DCRUM Intro 2012 Version 12.00Document142 pagesCompuware DCRUM Intro 2012 Version 12.00JanNo ratings yet
- Etymological Wordplay in Ovid's Pyramus and ThisbeDocument5 pagesEtymological Wordplay in Ovid's Pyramus and Thisbeignoramus83No ratings yet
- Eps 400 New Notes Dec 15-1Document47 pagesEps 400 New Notes Dec 15-1BRIAN MWANGINo ratings yet
- Instant Download The Practice of Creative Writings 3rd Edition Ebook PDF PDF FREEDocument32 pagesInstant Download The Practice of Creative Writings 3rd Edition Ebook PDF PDF FREEbarbara.ward425100% (46)
- Manual en TC1 TD4 Curr 2018-07-16Document39 pagesManual en TC1 TD4 Curr 2018-07-16Daniel Peña100% (1)
- Minglana-Mitch-T-Answers in Long QuizDocument9 pagesMinglana-Mitch-T-Answers in Long QuizMitch MinglanaNo ratings yet
- Group Screening Test, English 6Document4 pagesGroup Screening Test, English 6Jayson Alvarez MagnayeNo ratings yet
- Comparison of The EC-GMP Guide Part I With The SFDA-GMP Guideline For Chinese CompaniesDocument7 pagesComparison of The EC-GMP Guide Part I With The SFDA-GMP Guideline For Chinese Companiesrambabukomati472No ratings yet
- Linic - by SlidesgoDocument84 pagesLinic - by SlidesgoKhansa MutiaraHasnaNo ratings yet
- A Review of Automatic License Plate Recognition System in Mobile-Based PlatformDocument6 pagesA Review of Automatic License Plate Recognition System in Mobile-Based PlatformadiaNo ratings yet
- Causal Relationships WorksheetDocument2 pagesCausal Relationships Worksheetledmabaya23No ratings yet
- English Idioms and PhrasesDocument384 pagesEnglish Idioms and Phrasesthwe thweNo ratings yet
- Circuit Breaker - Ground & Test Device Type VR Electrically OperatedDocument24 pagesCircuit Breaker - Ground & Test Device Type VR Electrically OperatedcadtilNo ratings yet
- Cosmology Questions and Answers - SanfoundryDocument9 pagesCosmology Questions and Answers - SanfoundryGopinathan MNo ratings yet
- DIFFERENCE BETWEEN Intrior Design and DecorationDocument13 pagesDIFFERENCE BETWEEN Intrior Design and DecorationSadaf khanNo ratings yet
- Philippines and Singapore Trade Relations and Agreements: 1. What Leads To Said Agreement?Document11 pagesPhilippines and Singapore Trade Relations and Agreements: 1. What Leads To Said Agreement?Ayrah Erica JaimeNo ratings yet
- Lessons From The Humanitarian Disaster Logistics Management A Case Study of The Earthquake in HaitiDocument19 pagesLessons From The Humanitarian Disaster Logistics Management A Case Study of The Earthquake in HaitiM Irfan Kemal100% (1)
- SB Roadmap B1 1Document161 pagesSB Roadmap B1 1Carmen Flores AloyNo ratings yet
- Extension of MDRRMO OfficeDocument12 pagesExtension of MDRRMO OfficeJustin YuabNo ratings yet
- Implementasi Sistem Pengenalan Candi Kecil Di Yogyakarta Menggunakan BerbasisDocument7 pagesImplementasi Sistem Pengenalan Candi Kecil Di Yogyakarta Menggunakan BerbasisRivan AuliaNo ratings yet
- Algorithm Design TechniquesDocument24 pagesAlgorithm Design TechniquespermasaNo ratings yet
- WB-Mech 120 Ch05 ModalDocument16 pagesWB-Mech 120 Ch05 ModalhebiyongNo ratings yet
- The Mutant Epoch Mature Adult Content Mutations v1Document4 pagesThe Mutant Epoch Mature Adult Content Mutations v1Joshua GibsonNo ratings yet
- Amlodipine Besylate Drug StudyDocument2 pagesAmlodipine Besylate Drug StudyJonieP84No ratings yet
- Transformational and Charismatic Leadership: The Road Ahead 10th Anniversary EditionDocument32 pagesTransformational and Charismatic Leadership: The Road Ahead 10th Anniversary Editionfisaac333085No ratings yet
- Theories of GrowthDocument33 pagesTheories of Growthdr parveen bathlaNo ratings yet
- BRB Personal Care Cost Effictive Guide Formulation Edition 2019Document28 pagesBRB Personal Care Cost Effictive Guide Formulation Edition 2019Abdulrahman HamdanNo ratings yet
- Useful C Library FunctionDocument31 pagesUseful C Library FunctionraviNo ratings yet
- Defining Who Is A Volunteer ConceptualDocument21 pagesDefining Who Is A Volunteer ConceptualYosep Trisaputro WahyuNo ratings yet
- Clean Mama's Guide to a Healthy Home: The Simple, Room-by-Room Plan for a Natural HomeFrom EverandClean Mama's Guide to a Healthy Home: The Simple, Room-by-Room Plan for a Natural HomeRating: 5 out of 5 stars5/5 (2)
- The Gentle Art of Swedish Death Cleaning: How to Free Yourself and Your Family from a Lifetime of ClutterFrom EverandThe Gentle Art of Swedish Death Cleaning: How to Free Yourself and Your Family from a Lifetime of ClutterRating: 4 out of 5 stars4/5 (468)
- Declutter Like a Mother: A Guilt-Free, No-Stress Way to Transform Your Home and Your LifeFrom EverandDeclutter Like a Mother: A Guilt-Free, No-Stress Way to Transform Your Home and Your LifeRating: 4.5 out of 5 stars4.5/5 (164)
- It's All Too Much: An Easy Plan for Living a Richer Life with Less StuffFrom EverandIt's All Too Much: An Easy Plan for Living a Richer Life with Less StuffRating: 4 out of 5 stars4/5 (232)
- Transformed: Moving to the Product Operating ModelFrom EverandTransformed: Moving to the Product Operating ModelRating: 4 out of 5 stars4/5 (1)
- Summary of Goodbye, Things: The New Japanese Minimalism by Fumio SasakiFrom EverandSummary of Goodbye, Things: The New Japanese Minimalism by Fumio SasakiRating: 4.5 out of 5 stars4.5/5 (5)
- How to Keep House While Drowning: A Gentle Approach to Cleaning and OrganizingFrom EverandHow to Keep House While Drowning: A Gentle Approach to Cleaning and OrganizingRating: 4.5 out of 5 stars4.5/5 (847)
- How to Manage Your Home Without Losing Your Mind: Dealing with Your House's Dirty Little SecretsFrom EverandHow to Manage Your Home Without Losing Your Mind: Dealing with Your House's Dirty Little SecretsRating: 5 out of 5 stars5/5 (340)
- How to Keep House While Drowning: A Gentle Approach to Cleaning and OrganizingFrom EverandHow to Keep House While Drowning: A Gentle Approach to Cleaning and OrganizingRating: 4.5 out of 5 stars4.5/5 (79)
- The Martha Manual: How to Do (Almost) EverythingFrom EverandThe Martha Manual: How to Do (Almost) EverythingRating: 4 out of 5 stars4/5 (11)
- Summary of KC Davis's How to Keep House While DrowningFrom EverandSummary of KC Davis's How to Keep House While DrowningRating: 5 out of 5 stars5/5 (1)
- The Joy of Less: A Minimalist Guide to Declutter, Organize, and SimplifyFrom EverandThe Joy of Less: A Minimalist Guide to Declutter, Organize, and SimplifyRating: 4 out of 5 stars4/5 (278)
- Success at Home with ADHD.: Practical Organization Strategies to Make Your Life Easier.From EverandSuccess at Home with ADHD.: Practical Organization Strategies to Make Your Life Easier.Rating: 4 out of 5 stars4/5 (17)
- Decluttering at the Speed of Life: Winning Your Never-Ending Battle with StuffFrom EverandDecluttering at the Speed of Life: Winning Your Never-Ending Battle with StuffRating: 4.5 out of 5 stars4.5/5 (578)
- The Everything Organize Your Home Book: Eliminate clutter, set up your home office, and utilize space in your homeFrom EverandThe Everything Organize Your Home Book: Eliminate clutter, set up your home office, and utilize space in your homeRating: 3 out of 5 stars3/5 (1)
- The Life-Changing Magic of Tidying Up: The Japanese Art of Decluttering and OrganizingFrom EverandThe Life-Changing Magic of Tidying Up: The Japanese Art of Decluttering and OrganizingRating: 4 out of 5 stars4/5 (2997)
- Organizing for the Rest of Us: 100 Realistic Strategies to Keep Any House Under ControlFrom EverandOrganizing for the Rest of Us: 100 Realistic Strategies to Keep Any House Under ControlRating: 4.5 out of 5 stars4.5/5 (206)
- Let It Go: Downsizing Your Way to a Richer, Happier LifeFrom EverandLet It Go: Downsizing Your Way to a Richer, Happier LifeRating: 4.5 out of 5 stars4.5/5 (67)
- Laws of UX: Using Psychology to Design Better Products & ServicesFrom EverandLaws of UX: Using Psychology to Design Better Products & ServicesRating: 5 out of 5 stars5/5 (9)
- Carpentry Made Easy - The Science and Art of Framing - With Specific Instructions for Building Balloon Frames, Barn Frames, Mill Frames, Warehouses, Church SpiresFrom EverandCarpentry Made Easy - The Science and Art of Framing - With Specific Instructions for Building Balloon Frames, Barn Frames, Mill Frames, Warehouses, Church SpiresRating: 1 out of 5 stars1/5 (2)
- Life Hacks: 50 Amazing Life Hacks That Will Make Your Life EasierFrom EverandLife Hacks: 50 Amazing Life Hacks That Will Make Your Life EasierRating: 4 out of 5 stars4/5 (3)