You might also like
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (121)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Kindergarten Boyfriend From HeathersDocument11 pagesKindergarten Boyfriend From HeathersRaquel Carvalho100% (3)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (588)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (400)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (345)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (895)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- An Irish BlessingDocument1 pageAn Irish BlessingNele-D0% (1)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Grazilaxx'S Guide: AncestryDocument35 pagesGrazilaxx'S Guide: AncestryJoão BrumattiNo ratings yet
- Hearts of WulinDocument231 pagesHearts of WulinAieie100% (1)
- Unisim Hot Keys PDFDocument1 pageUnisim Hot Keys PDFNatasha GhazaliNo ratings yet
- A New Transcription and Performance Interpretation of J.S. BachsDocument110 pagesA New Transcription and Performance Interpretation of J.S. BachsFedericoYañezNo ratings yet
- FlashArray XR2 & XR3 Cabling GuideDocument21 pagesFlashArray XR2 & XR3 Cabling GuideluckyNo ratings yet
- 2010 Double Bass ExcerptsDocument8 pages2010 Double Bass ExcerptsSebastien SiroisNo ratings yet
- ALL ABOUT US 5 UNIT 5 Vocab and GrammarDocument3 pagesALL ABOUT US 5 UNIT 5 Vocab and Grammaravecren67% (3)
- Dadaist FilmsDocument4 pagesDadaist FilmsDiego GrañenaNo ratings yet
- From Here To Sanguinity NumeneraDocument6 pagesFrom Here To Sanguinity NumeneraMaya KarasovaNo ratings yet
- New Ob W Jungle Book TestDocument9 pagesNew Ob W Jungle Book TestLiliana AmpNo ratings yet
- Manual Analizador Pirogenio Ellab Man - Py - SW - 20090626 - 3.0 PDFDocument122 pagesManual Analizador Pirogenio Ellab Man - Py - SW - 20090626 - 3.0 PDFAlam AlvesNo ratings yet
- Smart Agriculture System Using IOTDocument3 pagesSmart Agriculture System Using IOTVrushali KhatpeNo ratings yet
- Embedded Tourist Guide Using ARM-7 and RFID TechniquesDocument3 pagesEmbedded Tourist Guide Using ARM-7 and RFID TechniquesVrushali KhatpeNo ratings yet
- Iot Based Green House Monitoring SystemDocument19 pagesIot Based Green House Monitoring SystemVrushali KhatpeNo ratings yet
- Morse CodeDocument7 pagesMorse CodeVrushali KhatpeNo ratings yet
- Shopping Mall Transaction Control Using Smart Card and GSM TechniquesDocument3 pagesShopping Mall Transaction Control Using Smart Card and GSM TechniquesVrushali KhatpeNo ratings yet
- Neonatal Monitoring SmartphoneDocument5 pagesNeonatal Monitoring SmartphoneVrushali KhatpeNo ratings yet
- Digital Audio Watermarking Using Digital Wavelet Transform: AbstractDocument17 pagesDigital Audio Watermarking Using Digital Wavelet Transform: AbstractVrushali KhatpeNo ratings yet
- MFCC Speech PDFDocument8 pagesMFCC Speech PDFVrushali KhatpeNo ratings yet
- Automation of MallDocument4 pagesAutomation of MallVrushali KhatpeNo ratings yet
- 1.1 Problem Definition: 1.2.1 Available Methods of RecognitionDocument17 pages1.1 Problem Definition: 1.2.1 Available Methods of RecognitionVrushali KhatpeNo ratings yet
- American Standard Sign Language Representation Using SpeechRecognitionDocument5 pagesAmerican Standard Sign Language Representation Using SpeechRecognitionVrushali KhatpeNo ratings yet
- Atm DDDocument5 pagesAtm DDVrushali KhatpeNo ratings yet
- Water BillingDocument3 pagesWater BillingVrushali KhatpeNo ratings yet
- ANNOT For Gas - 8051GSMDocument5 pagesANNOT For Gas - 8051GSMVrushali KhatpeNo ratings yet
- Remote Aquarium Monitor and Control System: Project DescriptionDocument7 pagesRemote Aquarium Monitor and Control System: Project DescriptionVrushali KhatpeNo ratings yet
- Face Recognition SystemDocument6 pagesFace Recognition SystemVrushali KhatpeNo ratings yet
- Zigbee Based Wireless Air Pollution Monitoring: Nikheel A. Chourasia Surekha P. WashimkarDocument5 pagesZigbee Based Wireless Air Pollution Monitoring: Nikheel A. Chourasia Surekha P. WashimkarVrushali KhatpeNo ratings yet
- Taliking System For Blind - UltrasonicDocument2 pagesTaliking System For Blind - UltrasonicVrushali KhatpeNo ratings yet
- S2-2nd Edit Unit-6 (6.4 Colours of Light)Document18 pagesS2-2nd Edit Unit-6 (6.4 Colours of Light)Kyaw Sit Nyein MaungNo ratings yet
- Warner Records IncDocument5 pagesWarner Records IncMi PhanNo ratings yet
- Error Code Bizhub 350Document1 pageError Code Bizhub 350Fotocopy ChanelNo ratings yet
- Football Fortunes - Rules.enDocument13 pagesFootball Fortunes - Rules.enRishavGoelNo ratings yet
- English Test Part A I. Choose The Best Answer by Crossing The Letter A, B, C or D!Document3 pagesEnglish Test Part A I. Choose The Best Answer by Crossing The Letter A, B, C or D!Yudi AsmoroNo ratings yet
- AlteonDocument13 pagesAlteonChuck CheungNo ratings yet
- Internal Tests 990cxiDocument9 pagesInternal Tests 990cxinicky_balanNo ratings yet
- Orthodox Theatre in ByzantiumDocument3 pagesOrthodox Theatre in ByzantiumASRNo ratings yet
- History of BasketballDocument9 pagesHistory of Basketballflo sollestreNo ratings yet
- Oneida VVS FootballDocument1 pageOneida VVS FootballOneida Daily DispatchNo ratings yet
- Intro To TheaterDocument22 pagesIntro To TheaterMichelle RangesNo ratings yet
- Screenshot 2022-04-09 at 4.20.54 PMDocument1 pageScreenshot 2022-04-09 at 4.20.54 PMalex whiteNo ratings yet
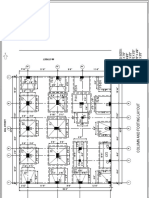
- Column and Footing LayoutDocument1 pageColumn and Footing LayoutV.m. RajanNo ratings yet
- AutoTap ManualDocument54 pagesAutoTap ManualDaniel BernardNo ratings yet
- Aikido VocabularyDocument5 pagesAikido VocabularyrafiendutNo ratings yet
- Swann n3960 Camera ManualDocument4 pagesSwann n3960 Camera ManualEddie Lopez0% (3)
- ERLPhase USB Driver InstructionsDocument9 pagesERLPhase USB Driver InstructionscacobecoNo ratings yet