You might also like
- L15 - Template Report CDIODocument6 pagesL15 - Template Report CDIO689xt586jgNo ratings yet
- Measurement and Instrumentation Lab 1Document10 pagesMeasurement and Instrumentation Lab 1Mompati Letsweletse100% (1)
- Lab Mannual PDFDocument26 pagesLab Mannual PDFssptc Magazine100% (1)
- Manual Ee ViiiDocument43 pagesManual Ee ViiiAkhilesh Kumar MishraNo ratings yet
- Ec2405 - Optical and Microwave Laboratory (Manual)Document32 pagesEc2405 - Optical and Microwave Laboratory (Manual)Jonathan SheltonNo ratings yet
- Lab 1 Operation of Oscilloscope and Nuclear ElectronicsDocument6 pagesLab 1 Operation of Oscilloscope and Nuclear ElectronicsSaRaNo ratings yet
- ECA-II Manual CompleteDocument100 pagesECA-II Manual CompleteRaheel RaufNo ratings yet
- Elab3 Jan 09Document13 pagesElab3 Jan 09Marlon BoucaudNo ratings yet
- Integrators, Differentiators, and Simple Filters: 6. PrelabDocument15 pagesIntegrators, Differentiators, and Simple Filters: 6. PrelabMIn LeNo ratings yet
- PNEUMATICS AND AIR CIRCUITS UNDERSTANDING THE CASCADE VALVE AND PLC UNDERSTANDINGFrom EverandPNEUMATICS AND AIR CIRCUITS UNDERSTANDING THE CASCADE VALVE AND PLC UNDERSTANDINGNo ratings yet
- Lab 10Document7 pagesLab 10Magdalena SimicNo ratings yet
- CA Lab Manual ScopeDocument10 pagesCA Lab Manual Scopea2367916100% (1)
- Experiment No. 8 Am Signal Demodulation TechniquesDocument12 pagesExperiment No. 8 Am Signal Demodulation Techniquesez shintaishiNo ratings yet
- Familiarization With AC Instruments: Experiment No. 1Document13 pagesFamiliarization With AC Instruments: Experiment No. 1NicoNo ratings yet
- CAPE U2 LAB#8 Azariah BarrettDocument5 pagesCAPE U2 LAB#8 Azariah BarrettazaribarrNo ratings yet
- Low Pass Filter 1st OrderDocument7 pagesLow Pass Filter 1st OrdervlsijpNo ratings yet
- Lab #2: Oscilloscopes and Time Varying Signals Engr. 221-001 October 20, 2010 Dr. Paul Hummel Louisiana Tech UniversityDocument7 pagesLab #2: Oscilloscopes and Time Varying Signals Engr. 221-001 October 20, 2010 Dr. Paul Hummel Louisiana Tech UniversitySajan ShresthaNo ratings yet
- Ti Adc 2012 Team 28 4 Phase 1aDocument13 pagesTi Adc 2012 Team 28 4 Phase 1ahv_chillal88No ratings yet
- Experiment: 2 1.0 TOPIC: R R C FDocument4 pagesExperiment: 2 1.0 TOPIC: R R C FLian Ai ChenNo ratings yet
- Oscilloscope 2Document22 pagesOscilloscope 2Anggia ErdienzyNo ratings yet
- Lab 1 Communication SystemDocument7 pagesLab 1 Communication SystemKhawla AlameriNo ratings yet
- Ecen 248 Lab 2 ReportDocument4 pagesEcen 248 Lab 2 Reportapi-241454978No ratings yet
- LAB 8: Stain Gauge MeasurementDocument4 pagesLAB 8: Stain Gauge MeasurementAkinoJohnkennedyNo ratings yet
- Engineering University of Engineering and Technology Peshawar (Abbottabad Campus) Lab ReportDocument9 pagesEngineering University of Engineering and Technology Peshawar (Abbottabad Campus) Lab ReportTime PresentsNo ratings yet
- Transient Response of RC CircuitDocument5 pagesTransient Response of RC CircuitJayesh Ruikar100% (1)
- Amplifiers and OscillatorsDocument109 pagesAmplifiers and OscillatorsAdilNo ratings yet
- EC6512 Communication System Lab ManualDocument52 pagesEC6512 Communication System Lab ManualSalai Kishwar JahanNo ratings yet
- Etd Lab2Document10 pagesEtd Lab2Isaya KawanaNo ratings yet
- Ec6512 Communication Systems Laboratory ManuslDocument86 pagesEc6512 Communication Systems Laboratory ManuslSriram71% (24)
- To Learn About The Op-Amp Based Schmitt Trigger Circuit and Understand Its WorkingDocument47 pagesTo Learn About The Op-Amp Based Schmitt Trigger Circuit and Understand Its WorkingRam Manohar NisargNo ratings yet
- Transmission of Signals Sergejs BoikoDocument22 pagesTransmission of Signals Sergejs BoikoСергей БойкоNo ratings yet
- T 7.2.1.1 Multiplicación de FrecuenciaDocument40 pagesT 7.2.1.1 Multiplicación de FrecuenciaBlademir Parra GayosoNo ratings yet
- Jawaharlal Nehru Engineering College: Laboratory ManualDocument33 pagesJawaharlal Nehru Engineering College: Laboratory ManualJerry boyNo ratings yet
- Frequency Response of System (Bode Diagram & Nyquist Plot)Document12 pagesFrequency Response of System (Bode Diagram & Nyquist Plot)Athirah Abd AzizNo ratings yet
- TBS1000B-EDU Courseware Lab Sampler: Selection GuideDocument50 pagesTBS1000B-EDU Courseware Lab Sampler: Selection GuideAnonymous uiqGXPYbNo ratings yet
- Reception of Amplitude Modulated Signals AM DemodulationDocument9 pagesReception of Amplitude Modulated Signals AM DemodulationKenburNo ratings yet
- Design and Characterization of A Band-Pass Filter PDFDocument6 pagesDesign and Characterization of A Band-Pass Filter PDFjgalindesNo ratings yet
- Communication System Lab Manual 123Document18 pagesCommunication System Lab Manual 123Dewan IqbalNo ratings yet
- Lab 7 Dynamic Parameters of 2 Order Measurement SystemsDocument6 pagesLab 7 Dynamic Parameters of 2 Order Measurement Systemsraylo4594No ratings yet
- Ec II Lab Manual (2013 2014)Document85 pagesEc II Lab Manual (2013 2014)surendhar1987No ratings yet
- Experiment 4Document9 pagesExperiment 4mohammed_524176180No ratings yet
- Comm2lab Exp2 PDFDocument21 pagesComm2lab Exp2 PDFFritz FatigaNo ratings yet
- (Experiment 2) Diode - Rectifier FilterDocument16 pages(Experiment 2) Diode - Rectifier FilterArik JuniarNo ratings yet
- Experiment 2 Basic Operational Amplifier CircuitsDocument7 pagesExperiment 2 Basic Operational Amplifier CircuitsVasursharpNo ratings yet
- Experiment 4 - Mixer IF Filter and Envelope Detector of AM ReceiverDocument8 pagesExperiment 4 - Mixer IF Filter and Envelope Detector of AM ReceiverJaphetRayModestoCanaNo ratings yet
- Interpretation Spectre SCDocument13 pagesInterpretation Spectre SCFrederic DelmarcheNo ratings yet
- Experiment No 1 AM TransmitterDocument6 pagesExperiment No 1 AM TransmitterashfaqiNo ratings yet
- Adc Practical 2022Document39 pagesAdc Practical 2022Kaushal ChauvhanNo ratings yet
- 225 - Lab 1 ReportDocument10 pages225 - Lab 1 Reportsyed IrvinNo ratings yet
- Practicas de OsciloscopioDocument9 pagesPracticas de OsciloscopiokarolcoNo ratings yet
- Lab 1 Report: Ho Nguyen Bao Tran Le Huynh Minh NguyetDocument20 pagesLab 1 Report: Ho Nguyen Bao Tran Le Huynh Minh NguyetBin BinNo ratings yet
- Application Note 131 February 2011 An Introduction To Acoustic ThermometryDocument16 pagesApplication Note 131 February 2011 An Introduction To Acoustic ThermometryHahdNo ratings yet
- Foi Question PaperDocument2 pagesFoi Question PaperSudden leeNo ratings yet
- Electrical Circuits Lab Experiment 1 Introduction To Basic Test and Management Equipment Part2 Oscilloscope Prepared By: Ahmad AlwohoushDocument5 pagesElectrical Circuits Lab Experiment 1 Introduction To Basic Test and Management Equipment Part2 Oscilloscope Prepared By: Ahmad AlwohoushAhmadSalimAlwohoushNo ratings yet
- Exp 8Document12 pagesExp 8esumshunNo ratings yet
- Jordan University of Science and Technology: Faculty of Engineering Department of Mechanical EngineeringDocument9 pagesJordan University of Science and Technology: Faculty of Engineering Department of Mechanical Engineeringmohamed almansiNo ratings yet
- Experiment 1 Measurement of Frequency and WavelengthDocument3 pagesExperiment 1 Measurement of Frequency and WavelengthengrkskNo ratings yet
- Diff AnsDocument5 pagesDiff AnsOnkar MulayNo ratings yet
- Analysis and Design of Multicell DC/DC Converters Using Vectorized ModelsFrom EverandAnalysis and Design of Multicell DC/DC Converters Using Vectorized ModelsNo ratings yet
- HAazopDocument35 pagesHAazopSaravanan ElangovanNo ratings yet
- Major Effects Japanese Occupation Malaya History EssayDocument7 pagesMajor Effects Japanese Occupation Malaya History EssaySaravanan ElangovanNo ratings yet
- Yamaha RXZ CATALYZER Second Model Owner ManualDocument56 pagesYamaha RXZ CATALYZER Second Model Owner Manualkbir mokashi80% (5)
- Commercialization Plan CleanDocument9 pagesCommercialization Plan CleanSaravanan Elangovan100% (2)
- Major Effects Japanese Occupation Malaya History EssayDocument7 pagesMajor Effects Japanese Occupation Malaya History EssaySaravanan Elangovan0% (1)
- Exp4 - ResultDocument22 pagesExp4 - ResultSaravanan ElangovanNo ratings yet
- Cyient Transmit and Receive Module For Radar SystemsDocument4 pagesCyient Transmit and Receive Module For Radar SystemsPercy100% (1)
- Atc 1000 DS PDFDocument2 pagesAtc 1000 DS PDFKapil GalwaniNo ratings yet
- 3BDD011641R0301 - en RLM01 Redundancy Link Module For PROFIBUS DP FMS Data SheetDocument4 pages3BDD011641R0301 - en RLM01 Redundancy Link Module For PROFIBUS DP FMS Data SheetADMixaNo ratings yet
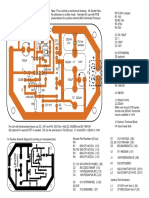
- Desulfator PCB PDFDocument1 pageDesulfator PCB PDFMarco Antonio NardyNo ratings yet
- Programmable Logic Controller (PLC)Document85 pagesProgrammable Logic Controller (PLC)riajdcNo ratings yet
- DENONavr1802 OwnersmanualDocument96 pagesDENONavr1802 OwnersmanualThomas DupinNo ratings yet
- Rfic & Mmic-0Document12 pagesRfic & Mmic-0PhilippeaNo ratings yet
- Convolutional Coded On-Off Keying Free-Space Optical Links Over Fading ChannelsDocument6 pagesConvolutional Coded On-Off Keying Free-Space Optical Links Over Fading ChannelsseventhsensegroupNo ratings yet
- Maintenance Handbook On Public Address SystemDocument63 pagesMaintenance Handbook On Public Address SystemAgronNo ratings yet
- Mohammad Reza Pasandideh - ThesisDocument166 pagesMohammad Reza Pasandideh - Thesishmalrizzo469No ratings yet
- Catalog Commax 2012 2013Document28 pagesCatalog Commax 2012 2013MesterulTauNo ratings yet
- Chapter 03completeDocument56 pagesChapter 03completeMohammad SubhanNo ratings yet
- Chapter 9 - FMIDocument4 pagesChapter 9 - FMIMiguel Angel ValderramaNo ratings yet
- WISOLAppNote WSSFM10R HW Design Guide R03 170320 PDFDocument6 pagesWISOLAppNote WSSFM10R HW Design Guide R03 170320 PDFRegis DantasNo ratings yet
- FT-817 Softw Adjustment Menu Tabela Com Valores DefaultDocument6 pagesFT-817 Softw Adjustment Menu Tabela Com Valores DefaultDaniel CoslovskyNo ratings yet
- Eaas0593 XaDocument24 pagesEaas0593 XaAchmad AnugrahNo ratings yet
- Mobile Phone Parts Functions & Identification (The Big Parts) Cute MobileTechDocument13 pagesMobile Phone Parts Functions & Identification (The Big Parts) Cute MobileTechCharles AbrahamNo ratings yet
- CIM Motor Curve Am 0255Document1 pageCIM Motor Curve Am 0255Julio CostaNo ratings yet
- BSNL 5-EssDocument28 pagesBSNL 5-EssGaurav100% (1)
- All-In-One Wireless CCTV Kit: FeaturesDocument2 pagesAll-In-One Wireless CCTV Kit: FeaturesHans66No ratings yet
- ListnamaDocument17 pagesListnamaMuhammad RiyadiNo ratings yet
- Dir 700 Dbii TG Ml312eDocument2 pagesDir 700 Dbii TG Ml312eGin Kap Sian ThangNo ratings yet
- Hardware QuestionnaireDocument2 pagesHardware QuestionnaireShakila ShakiNo ratings yet
- Unit-1 PicDocument40 pagesUnit-1 Picsarath100% (1)
- Optimized Rat-Race Coupler With Different Shapes of Defected Ground StructureDocument4 pagesOptimized Rat-Race Coupler With Different Shapes of Defected Ground Structureravi010582No ratings yet
- DetalleSolicitud 202208170905Document1 pageDetalleSolicitud 202208170905Renato BobadillaNo ratings yet
- NetUP IPTV BrochureDocument10 pagesNetUP IPTV BrochureTechne PhobosNo ratings yet
- Undervoltage/Overvoltage Lockout For VI-200/VI-J00 and Maxi, Mini, Micro ConvertersDocument10 pagesUndervoltage/Overvoltage Lockout For VI-200/VI-J00 and Maxi, Mini, Micro ConvertersAnonymous TPVfFif6TONo ratings yet
- The Pioneer: of FintechDocument18 pagesThe Pioneer: of FintechKitNo ratings yet