You might also like
- Energies: Sliding Mode Observer With Adaptive Parameter Estimation For Sensorless Control of IPMSMDocument18 pagesEnergies: Sliding Mode Observer With Adaptive Parameter Estimation For Sensorless Control of IPMSMNhan NguyenNo ratings yet
- A High-Speed Sliding-Mode Observer For The Sensorless Speed Control of A PMSMDocument9 pagesA High-Speed Sliding-Mode Observer For The Sensorless Speed Control of A PMSMMaroju Santosh KiranNo ratings yet
- A MRAS-based Stator Resistance and Speed Estimation For Sensorless IPMSMDocument15 pagesA MRAS-based Stator Resistance and Speed Estimation For Sensorless IPMSMmusty38No ratings yet
- [23]An Improved Sliding Mode Control Using Disturbance Torque Observer for Permanent Magnet Synchronous MotorDocument11 pages[23]An Improved Sliding Mode Control Using Disturbance Torque Observer for Permanent Magnet Synchronous MotorNguyễn Văn HoàNo ratings yet
- Research Article: Sensorless Speed Control of Permanent Magnet Synchronous Motors by Neural Network AlgorithmDocument8 pagesResearch Article: Sensorless Speed Control of Permanent Magnet Synchronous Motors by Neural Network AlgorithmfvijayamiNo ratings yet
- Discrete-Time Sliding Mode Control of Permanent Magnet Linear Synchronous Motor in High-Performance Motion With Large Parameter UncertaintyDocument4 pagesDiscrete-Time Sliding Mode Control of Permanent Magnet Linear Synchronous Motor in High-Performance Motion With Large Parameter UncertaintyElzan AgungNo ratings yet
- Sensor-Less Field Oriented Control of Wind TurbineDocument11 pagesSensor-Less Field Oriented Control of Wind TurbinegiovanniNo ratings yet
- On Sensorless Induction Motor Drives: Sliding Mode Observer and Output Feedback ControllerDocument8 pagesOn Sensorless Induction Motor Drives: Sliding Mode Observer and Output Feedback ControllerRaja ReddyNo ratings yet
- Sensorless Control Strategy of Permanent Magnet Synchronous Motor Based On Fuzzy Sliding Mode ObserverDocument10 pagesSensorless Control Strategy of Permanent Magnet Synchronous Motor Based On Fuzzy Sliding Mode ObserverAnil Kumar MNo ratings yet
- Sensorless Control of Permanent Magnet Synchronous Motor A Survey WWW - Daneshpajooh.irDocument8 pagesSensorless Control of Permanent Magnet Synchronous Motor A Survey WWW - Daneshpajooh.ira1690074No ratings yet
- Compensation Algorithms For SMO PMSMDocument8 pagesCompensation Algorithms For SMO PMSMKik0510No ratings yet
- Icee2015 Paper Id3911Document4 pagesIcee2015 Paper Id3911Zellagui EnergyNo ratings yet
- Van 2013Document9 pagesVan 2013HowlNo ratings yet
- Introduction To PMSM MachineDocument5 pagesIntroduction To PMSM MachineMd QutubuddinNo ratings yet
- Research ArticleDocument8 pagesResearch Articletariq76No ratings yet
- Energies 11 03517Document21 pagesEnergies 11 03517Hemanth KumarNo ratings yet
- Fuzzy Mras PMSMDocument6 pagesFuzzy Mras PMSMFrancisco Liszt Nunes JuniorNo ratings yet
- Sliding ModeDocument13 pagesSliding ModeSiva Ganesh MallaNo ratings yet
- Applied Sciences: Practical Adaptive Sliding-Mode Control Approach For Precise Tracking of Robot ManipulatorsDocument16 pagesApplied Sciences: Practical Adaptive Sliding-Mode Control Approach For Precise Tracking of Robot ManipulatorsOmokhafe TolaNo ratings yet
- An Adaptive-Gain Sliding Mode Observer For Sensorless Control of Permanent Magnet Linear Synchronous MotorsDocument10 pagesAn Adaptive-Gain Sliding Mode Observer For Sensorless Control of Permanent Magnet Linear Synchronous MotorsBhushan JoshiNo ratings yet
- Model Reference Adaptive Control Based Parameters Estimation of Permanent Magnet Synchronous Motor DriveDocument9 pagesModel Reference Adaptive Control Based Parameters Estimation of Permanent Magnet Synchronous Motor DriveInternational Journal of Application or Innovation in Engineering & ManagementNo ratings yet
- PMSM Sensorless Control ThesisDocument6 pagesPMSM Sensorless Control Thesisafknwride100% (2)
- Energies: New Sensorless Speed Control of A Hybrid Stepper Motor Based On Fuzzy Sliding Mode ObserverDocument19 pagesEnergies: New Sensorless Speed Control of A Hybrid Stepper Motor Based On Fuzzy Sliding Mode ObserverTrần Tấn LộcNo ratings yet
- Model-Based Sensorless Control of An IPMSM With Enhanced Robustness Against Load Disturbances Based On Position and Speed Estimator Using A Speed ErrorDocument12 pagesModel-Based Sensorless Control of An IPMSM With Enhanced Robustness Against Load Disturbances Based On Position and Speed Estimator Using A Speed Errorsudheer307klceNo ratings yet
- Speed-Sensorless Estimation For Induction Motors Using Extended Kalman FiltersDocument9 pagesSpeed-Sensorless Estimation For Induction Motors Using Extended Kalman Filtersosmar_douradoNo ratings yet
- Position Control Performance Improvement of DTC-SVM For An Induction Motor: Application To Photovoltaic Panel PositionDocument14 pagesPosition Control Performance Improvement of DTC-SVM For An Induction Motor: Application To Photovoltaic Panel PositionأسامةبوعزيزNo ratings yet
- Energies: Robust Speed Control of PMSM Using Sliding Mode Control (SMC) - A ReviewDocument27 pagesEnergies: Robust Speed Control of PMSM Using Sliding Mode Control (SMC) - A ReviewAbir HezziNo ratings yet
- Speed Control of PMSM by Sliding Mode Control and PI Control1Document7 pagesSpeed Control of PMSM by Sliding Mode Control and PI Control1Lê Đức ThịnhNo ratings yet
- Robust Backstepping Sensorless Speed Control of PMSM UsingDocument6 pagesRobust Backstepping Sensorless Speed Control of PMSM UsingNguyễn Văn HoàNo ratings yet
- Extended Kalman Filter Based Speed Sensorless PMSM Control with Load ReconstructionDocument16 pagesExtended Kalman Filter Based Speed Sensorless PMSM Control with Load ReconstructionSohibul HajahNo ratings yet
- Backstepping Control of Speed Sensorless Permanent Magnet Synchronous Motor Based On Slide Model ObserverDocument7 pagesBackstepping Control of Speed Sensorless Permanent Magnet Synchronous Motor Based On Slide Model ObserverLê Đức ThịnhNo ratings yet
- Ước Tính Tốc Độ Rôto, Mômen Tải Và Các Thông Số Của ĐộngDocument8 pagesƯớc Tính Tốc Độ Rôto, Mômen Tải Và Các Thông Số Của ĐộngNguyễn Văn HoàNo ratings yet
- Command Shaping Techniques For Vibration Control of A Exible Robot ManipulatorDocument22 pagesCommand Shaping Techniques For Vibration Control of A Exible Robot ManipulatorsaeedNo ratings yet
- Adaptive SMO and tangent PLL for sensorless PMSMDocument12 pagesAdaptive SMO and tangent PLL for sensorless PMSMMuhammad Yusuf IrdandyNo ratings yet
- Simulation of A Space Vector Pulse Width Modulated Field Oriented Control of A Permanent Magnet Synchronous MotorDocument18 pagesSimulation of A Space Vector Pulse Width Modulated Field Oriented Control of A Permanent Magnet Synchronous MotorVictor IkechukwuNo ratings yet
- Sensorless Three-Phase Induction Motor Direct TorqDocument7 pagesSensorless Three-Phase Induction Motor Direct TorqSakthivelNo ratings yet
- Model Predictive Control of An Inverted Pendulum, MPCDocument4 pagesModel Predictive Control of An Inverted Pendulum, MPCerdsan100% (1)
- Energies 15 02689 v2Document17 pagesEnergies 15 02689 v2Mohit KaundalNo ratings yet
- Speed Control of DC Motor Using Sliding Mode Control ApproachDocument5 pagesSpeed Control of DC Motor Using Sliding Mode Control ApproachIOSRjournalNo ratings yet
- Education DTC 380 PDFDocument6 pagesEducation DTC 380 PDFНебојша МитровићNo ratings yet
- Fourier Series Learning Control Torque Ripple Minimization PMSMsDocument16 pagesFourier Series Learning Control Torque Ripple Minimization PMSMsCristian MardonesNo ratings yet
- Non-Linear Speed Control of PMSM - Mar13Document8 pagesNon-Linear Speed Control of PMSM - Mar13bala krishnanNo ratings yet
- Comparative Study of Sensorless Control Methods of PMSM DrivesDocument23 pagesComparative Study of Sensorless Control Methods of PMSM DrivesVinh LeNo ratings yet
- HF 1 Zaim2014Document11 pagesHF 1 Zaim2014Duy TínhNo ratings yet
- Crossmark: Control Engineering PracticeDocument13 pagesCrossmark: Control Engineering PracticeLê Đức ThịnhNo ratings yet
- Estimation and Active Damping of Unbalance Forces in Jeffcott-Like Rotor-Bearing SystemsDocument22 pagesEstimation and Active Damping of Unbalance Forces in Jeffcott-Like Rotor-Bearing SystemsAnonymous LU3Dz3TKtVNo ratings yet
- Speed Control Design of A PMSM Based On Functional Model Predictive ApproachDocument15 pagesSpeed Control Design of A PMSM Based On Functional Model Predictive Approachhieuhuech1No ratings yet
- Speed Control of PMSM Using HALL Signal Effect With Six Pulse Inverter in MATLAB/SIMLINKDocument8 pagesSpeed Control of PMSM Using HALL Signal Effect With Six Pulse Inverter in MATLAB/SIMLINKB.yaswanth KumarNo ratings yet
- New Sensor LessDocument10 pagesNew Sensor LessAbhishek AgarwalNo ratings yet
- acc.2016.7525245Document6 pagesacc.2016.7525245Nguyễn Văn HoàNo ratings yet
- HF 5 Energies-12-03645Document26 pagesHF 5 Energies-12-03645Duy TínhNo ratings yet
- A New Adaptive SMO For Speed Estimation of Sensorless Induction Motor Drives at Zero and Very Low FrequenciesDocument11 pagesA New Adaptive SMO For Speed Estimation of Sensorless Induction Motor Drives at Zero and Very Low FrequenciesUma SathyadevanNo ratings yet
- A Sliding Mode Controller For A Three Phase Induction MotorDocument4 pagesA Sliding Mode Controller For A Three Phase Induction MotorirfanangpNo ratings yet
- Speed Ripple Minimization of Permanent Magnet Synchronous Motor Based On Model Predictive and Iterative Learning ControlsDocument10 pagesSpeed Ripple Minimization of Permanent Magnet Synchronous Motor Based On Model Predictive and Iterative Learning ControlsnhatvpNo ratings yet
- Sliding Mode Control of Induction Motor ThesisDocument6 pagesSliding Mode Control of Induction Motor Thesiss0kuzej0byn2100% (2)
- Sensorless DTC of induction motor with sliding mode controllersDocument20 pagesSensorless DTC of induction motor with sliding mode controllersMuhammad UmarNo ratings yet
- Microprocessors and Microsystems: K. Thangarajan, A. SoundarrajanDocument10 pagesMicroprocessors and Microsystems: K. Thangarajan, A. SoundarrajanfvijayamiNo ratings yet
- Comparison of The Speedy Estimate Methods of The Induction MotorsDocument12 pagesComparison of The Speedy Estimate Methods of The Induction MotorsTELKOMNIKANo ratings yet
- Design High-Accuracy Attitude Stabilization System for Marine Satellite AntennaDocument19 pagesDesign High-Accuracy Attitude Stabilization System for Marine Satellite AntennaDouglas LimaNo ratings yet
- Overcurrent Relay Advances for Modern Electricity NetworksFrom EverandOvercurrent Relay Advances for Modern Electricity NetworksNo ratings yet
- Advantest r6441 DMM User ManualDocument263 pagesAdvantest r6441 DMM User Manualhieuhuech1No ratings yet
- sprc990 PDFDocument80 pagessprc990 PDF01689373477No ratings yet
- TDS7000 SeriesDocument254 pagesTDS7000 Serieshieuhuech1No ratings yet
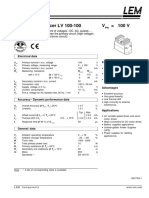
- Lem Voltage 100-500Document2 pagesLem Voltage 100-500hieuhuech1No ratings yet
- DC Motor TestDocument13 pagesDC Motor TestAjit KalelNo ratings yet
- SPLNPROC Word 2010-2016 Technical InstructionsDocument9 pagesSPLNPROC Word 2010-2016 Technical InstructionsMartín Montes RiveraNo ratings yet
- D SPACEtutorialDocument38 pagesD SPACEtutorialAsger Jørgen Thor HansenNo ratings yet
- PCR 500lDocument144 pagesPCR 500lhieuhuech1No ratings yet
- Real-Time Interface Dspace DSDocument12 pagesReal-Time Interface Dspace DShieuhuech1No ratings yet
- 2SP0115T Control IGBT ManualDocument21 pages2SP0115T Control IGBT Manualhieuhuech1No ratings yet
- DPWM PDFDocument6 pagesDPWM PDFhieuhuech1100% (1)
- Tektronix A6303 070390504Document34 pagesTektronix A6303 070390504hieuhuech1No ratings yet
- MPPT Fuzzy Control For Photovoltaic SystemDocument4 pagesMPPT Fuzzy Control For Photovoltaic Systemhieuhuech1No ratings yet
- Sanwa pc500Document42 pagesSanwa pc500hieuhuech1No ratings yet
- R2 T1 Fuzzy Control of PUMADocument4 pagesR2 T1 Fuzzy Control of PUMAhieuhuech1No ratings yet
- Simulation Study On Speed Control of Permanent Magnet Direct-Driven System For Mining ScraperDocument11 pagesSimulation Study On Speed Control of Permanent Magnet Direct-Driven System For Mining Scraperhieuhuech1No ratings yet
- Stator Flux and Speed - HADocument6 pagesStator Flux and Speed - HAhieuhuech1No ratings yet
- Modeling and Simulation of Longwall Scraper Conveyor Considering Operational FaultsDocument13 pagesModeling and Simulation of Longwall Scraper Conveyor Considering Operational FaultshieuhuechNo ratings yet
- 6DOF Motion PlatformDocument3 pages6DOF Motion Platformhieuhuech1No ratings yet
- Guideline For DSPACEDocument8 pagesGuideline For DSPACEhieuhuech1No ratings yet
- DC-AC Inverter 10KWDocument125 pagesDC-AC Inverter 10KWnishan80% (5)
- Release Notes For Altium Designer Version 17.0.7Document14 pagesRelease Notes For Altium Designer Version 17.0.7hieuhuech1No ratings yet
- Design of A Microcontroller-Based Circuit For Software ProtectionDocument6 pagesDesign of A Microcontroller-Based Circuit For Software Protectionhieuhuech1No ratings yet
- Permanent Magnet Synchronous Motor With Linear Quadratic Speed ControlDocument6 pagesPermanent Magnet Synchronous Motor With Linear Quadratic Speed Controlhieuhuech1No ratings yet
- Algoritmo Genético para MatlabDocument105 pagesAlgoritmo Genético para Matlabbonmarche28No ratings yet
- Such As - So - ThatDocument6 pagesSuch As - So - Thathieuhuech1No ratings yet
- Modeling and Control of A Single-Phase, 10 KW Fuel Cell InverterDocument119 pagesModeling and Control of A Single-Phase, 10 KW Fuel Cell Inverterhieuhuech1No ratings yet
- MSP430 LaunchPad Blink LEDs GuideDocument16 pagesMSP430 LaunchPad Blink LEDs Guidehieuhuech1No ratings yet
- Too... To - So ... ThatDocument3 pagesToo... To - So ... Thathieuhuech1No ratings yet
- Such As - So - ThatDocument6 pagesSuch As - So - Thathieuhuech1No ratings yet
- Value-Instruments Cat2012 enDocument58 pagesValue-Instruments Cat2012 enAnonymous C6Vaod9No ratings yet
- SPW3 Manual Rev 5Document713 pagesSPW3 Manual Rev 5JPYadavNo ratings yet
- AOE - FormDocument8 pagesAOE - FormBimal GuptaNo ratings yet
- Qcs 2010 Section 5 Part 8 Transportation and Placing of ConcreteDocument7 pagesQcs 2010 Section 5 Part 8 Transportation and Placing of Concretebryanpastor106No ratings yet
- Tech Rider For ShaanDocument7 pagesTech Rider For ShaanSagar Shirole100% (1)
- 7.qad-Dpr-11 ImteDocument4 pages7.qad-Dpr-11 ImteDhinakaranNo ratings yet
- Touch Screen TechnologyDocument18 pagesTouch Screen TechnologySmîlērNo ratings yet
- MTBE Presintation For IMCODocument26 pagesMTBE Presintation For IMCOMaryam AlqasimyNo ratings yet
- Factors Affecting Purchase Intentions in Generation Z Towards Hipster Cafe in Kelantan LOCKEDDocument70 pagesFactors Affecting Purchase Intentions in Generation Z Towards Hipster Cafe in Kelantan LOCKEDlassan199358No ratings yet
- Oracle Database Question Bank 1Document5 pagesOracle Database Question Bank 1subbaraomca2010No ratings yet
- Carbon Trading: Delaying Transition Away from Fossil FuelsDocument36 pagesCarbon Trading: Delaying Transition Away from Fossil FuelsFitria AyuNo ratings yet
- Process Sizing CriteriaDocument91 pagesProcess Sizing CriteriaMohammad BadakhshanNo ratings yet
- 1HD-T - 1 Land Cruiser Engine Service ManualDocument26 pages1HD-T - 1 Land Cruiser Engine Service ManualMichael Dzidowski86% (7)
- Scope of Work Project Sahastradhara Road (GYAN CONSTRUCTIONS)Document4 pagesScope of Work Project Sahastradhara Road (GYAN CONSTRUCTIONS)Hotel Central palaceNo ratings yet
- MPTK Medium Pressure Pump Performance SpecsDocument2 pagesMPTK Medium Pressure Pump Performance SpecssaronandyNo ratings yet
- Rising Stem Ball ValveDocument6 pagesRising Stem Ball ValveAnupam A. GandhewarNo ratings yet
- Bulletin 1395 Digital DC Drive 1350A & 2250ADocument213 pagesBulletin 1395 Digital DC Drive 1350A & 2250ATulioPenaNo ratings yet
- GPT 1-15 LineBackerDocument4 pagesGPT 1-15 LineBackerazadeazNo ratings yet
- Power Plant Engineering by G.R.nagpalDocument729 pagesPower Plant Engineering by G.R.nagpalGoutham Peri74% (23)
- Quarter 1 Week 8Document3 pagesQuarter 1 Week 8Geoffrey Tolentino-UnidaNo ratings yet
- 2 Biogas Kristianstad Brochure 2009Document4 pages2 Biogas Kristianstad Brochure 2009Baris SamirNo ratings yet
- Kosice Schulze Bramey PDFDocument13 pagesKosice Schulze Bramey PDFandrel_fariasNo ratings yet
- Masterseal 550Document4 pagesMasterseal 550Arjun MulluNo ratings yet
- Galaxy Service ManualDocument100 pagesGalaxy Service ManualGovind RajNo ratings yet
- OD Main Switch & OD OFF Indicator Light CircuitDocument4 pagesOD Main Switch & OD OFF Indicator Light Circuitcelestino tuliaoNo ratings yet
- Alpema Standerd For Brazed Aluminium Plate-Fin Heat ExchDocument78 pagesAlpema Standerd For Brazed Aluminium Plate-Fin Heat ExchBilal NazirNo ratings yet
- Dissertation ErsatzteilmanagementDocument7 pagesDissertation ErsatzteilmanagementWriteMyEnglishPaperForMeCanada100% (1)
- Questionnaire For Future BLICZerDocument1 pageQuestionnaire For Future BLICZerAlejandra GheorghiuNo ratings yet
- Degx1 Dggx1 Us PartsDocument24 pagesDegx1 Dggx1 Us PartsJeff RussoNo ratings yet
- List of Title-01Document30 pagesList of Title-01najwaNo ratings yet



![[23]An Improved Sliding Mode Control Using Disturbance Torque Observer for Permanent Magnet Synchronous Motor](https://imgv2-1-f.scribdassets.com/img/document/719350140/149x198/c1ef9a7124/1712072244?v=1)