You might also like
- CS3448 BOM - Parts List for CS3000/4000/4080 SchematicDocument7 pagesCS3448 BOM - Parts List for CS3000/4000/4080 SchematicJohnny Tenezaca DuarteNo ratings yet
- DC-AC Inverter 10KWDocument125 pagesDC-AC Inverter 10KWnishan80% (5)
- John Deere Diesel GensetDocument2 pagesJohn Deere Diesel Gensetnanocycle0% (1)
- DC Circuits 1st Edition by Chad DavisDocument136 pagesDC Circuits 1st Edition by Chad DavisHippong NiswantoroNo ratings yet
- Ev Battery TechnlogoiesDocument91 pagesEv Battery TechnlogoiesAtheli Vijay ChandraNo ratings yet
- Updated Brushless Controller Schematic 2015 DIY Electric Car, Masina ElectricaDocument32 pagesUpdated Brushless Controller Schematic 2015 DIY Electric Car, Masina ElectricaSyed Hassan TariqNo ratings yet
- SPLNPROC Word 2010-2016 Technical InstructionsDocument9 pagesSPLNPROC Word 2010-2016 Technical InstructionsMartín Montes RiveraNo ratings yet
- Speed Control for BLDC Motors Using PID Algorithm WhitepaperDocument14 pagesSpeed Control for BLDC Motors Using PID Algorithm Whitepapertoufani95No ratings yet
- Three-Phase BLDC Sensorless Motor Control ApplicationDocument30 pagesThree-Phase BLDC Sensorless Motor Control Applicationthierry42No ratings yet
- Sensorless PMSM Vector Control With A SM Observer USING MC56F8013Document110 pagesSensorless PMSM Vector Control With A SM Observer USING MC56F8013Chiheb Ben RegayaNo ratings yet
- ECE 8830 - Electric Drives: Topic 13: Vector Control of AC Induction MotorsDocument61 pagesECE 8830 - Electric Drives: Topic 13: Vector Control of AC Induction MotorsVikas PatelNo ratings yet
- Clipper and ClamperDocument35 pagesClipper and ClamperRahul YadavNo ratings yet
- ARM Architecture OverviewDocument7 pagesARM Architecture OverviewManiswari MothukuruNo ratings yet
- MmuDocument113 pagesMmuSunny SanNo ratings yet
- ICT Testing Electronic ComponentsDocument7 pagesICT Testing Electronic ComponentsCristine Santos100% (1)
- Sensorless Trapezoidal Control of BLDC MotorsDocument38 pagesSensorless Trapezoidal Control of BLDC MotorsYang ElvisQUNo ratings yet
- Synchronous MotorsDocument16 pagesSynchronous Motorsshinkentom2No ratings yet
- AnalogicdesignDocument42 pagesAnalogicdesignPrabhu SakinalaNo ratings yet
- Vtu Lab Manuals VlsiDocument79 pagesVtu Lab Manuals VlsisrikanthuasNo ratings yet
- Brushless DC (BLDC) Motor FundamentalsDocument20 pagesBrushless DC (BLDC) Motor FundamentalsEdo007100% (1)
- Introduction To Power ElectronicsDocument71 pagesIntroduction To Power ElectronicsAshwini SinghNo ratings yet
- DPWM PDFDocument6 pagesDPWM PDFhieuhuech1100% (1)
- Design and Implementation of A G P Photovoltaic Maximum Power Point TrackerDocument55 pagesDesign and Implementation of A G P Photovoltaic Maximum Power Point TrackerBilal KanjNo ratings yet
- Real-Time Interface Dspace DSDocument12 pagesReal-Time Interface Dspace DShieuhuech1No ratings yet
- 9309 - CMOS Analog Design Chapter 8Document54 pages9309 - CMOS Analog Design Chapter 8raju.kprr8862No ratings yet
- SensoMAG MCP50 Manual Call Point EN54-11 SpecsDocument2 pagesSensoMAG MCP50 Manual Call Point EN54-11 SpecsXavierNo ratings yet
- Construction and Working of Brushless DC PDFDocument12 pagesConstruction and Working of Brushless DC PDFaswardi8756No ratings yet
- BLDC Motor Open Loop ControlDocument20 pagesBLDC Motor Open Loop ControlShiva SuryaNo ratings yet
- Speed Control of BLDC MotorDocument5 pagesSpeed Control of BLDC Motorgourav kakhaniNo ratings yet
- BLDC Motors Controller Bxsd-Program Software ManualDocument5 pagesBLDC Motors Controller Bxsd-Program Software ManualAgi TriwibowoNo ratings yet
- How To Install ADB, Fastboot and Drivers in Few Seconds PDFDocument1 pageHow To Install ADB, Fastboot and Drivers in Few Seconds PDFdbmNo ratings yet
- Documentation of PMSMDocument89 pagesDocumentation of PMSM07be1a0213No ratings yet
- Electronics Mechanic PDFDocument41 pagesElectronics Mechanic PDFAn00pSherlock50% (6)
- Design and Development of Three Phase Permanent Magnet BrushlessDocument11 pagesDesign and Development of Three Phase Permanent Magnet BrushlessteomondoNo ratings yet
- AVR492: Brushless DC Motor Control Using AT90PWM3: Application NoteDocument26 pagesAVR492: Brushless DC Motor Control Using AT90PWM3: Application NotenicoletabytaxNo ratings yet
- BLDCDocument4 pagesBLDCmechtex Pvt LtdNo ratings yet
- Design of Three Phase Inverter Fed Induction Motor Drive Using Neural Network Predictive ControlDocument5 pagesDesign of Three Phase Inverter Fed Induction Motor Drive Using Neural Network Predictive Controlesatjournals100% (1)
- Project Electrical Equipments Control Through SoundDocument44 pagesProject Electrical Equipments Control Through SoundMicron MegaNo ratings yet
- Brushless Sensor ConfigDocument11 pagesBrushless Sensor ConfigAlexandru TimofteNo ratings yet
- Speed Control of BLDC Motor For Electric Vehicle: Presented byDocument13 pagesSpeed Control of BLDC Motor For Electric Vehicle: Presented byPawan ChauhanNo ratings yet
- CMOS Inverter LayoutDocument2 pagesCMOS Inverter LayoutRen ValerosoNo ratings yet
- Mobile Phone Charger ReportDocument16 pagesMobile Phone Charger ReportVarun Khanna100% (3)
- Manual - Samsung Galaxy Tab A7Document130 pagesManual - Samsung Galaxy Tab A7Hazel Aikulola Griffith100% (1)
- TRACTION CONTROLLER UNIT FOR ELECTRIC VEHICLESDocument18 pagesTRACTION CONTROLLER UNIT FOR ELECTRIC VEHICLESGiridharNo ratings yet
- Update Device Software For The Samsung Galaxy S 5 (G900A) - Wireless SupportDocument4 pagesUpdate Device Software For The Samsung Galaxy S 5 (G900A) - Wireless SupportOlabooye AyodejiNo ratings yet
- Advanced Battery Management System Using MATLAB SimulinkDocument6 pagesAdvanced Battery Management System Using MATLAB SimulinkAkash KumarNo ratings yet
- STM32 for Motor Control Applications FeaturesDocument61 pagesSTM32 for Motor Control Applications FeaturestraineeNo ratings yet
- Arc Welding Machine DesignDocument45 pagesArc Welding Machine DesignUbiracy ZanetiNo ratings yet
- EE6504 Electrical Machines-II PDFDocument233 pagesEE6504 Electrical Machines-II PDFkumar m100% (1)
- Design 1.5kVA PWM InverterDocument13 pagesDesign 1.5kVA PWM Invertershah pallav pankaj kumarNo ratings yet
- Embedded System in Automobiles Seminar ReportDocument18 pagesEmbedded System in Automobiles Seminar ReportDeepak DevarajanNo ratings yet
- Implementation of Brushless DC Motor Speed Control PDFDocument7 pagesImplementation of Brushless DC Motor Speed Control PDFDane DaneNo ratings yet
- Sensorless BLDC Control With Back-EMF FilteringDocument28 pagesSensorless BLDC Control With Back-EMF FilteringRomeo Đạp Xíck LôNo ratings yet
- Interface GSM Module with PIC MicrocontrollerDocument7 pagesInterface GSM Module with PIC Microcontrollerahmad_wazierNo ratings yet
- Eee-Vi-switchgear & Protection (10ee62) - NotesDocument93 pagesEee-Vi-switchgear & Protection (10ee62) - NotesVinoth Kumar0% (1)
- Switched Reluctance MotorDocument75 pagesSwitched Reluctance Motor15BEE1120 ISHAV SHARDANo ratings yet
- Exam 03 SolutionDocument13 pagesExam 03 Solutiondummy1957jNo ratings yet
- Design of High Performance Linear Brushless DC Motor With Ironless CoreDocument6 pagesDesign of High Performance Linear Brushless DC Motor With Ironless CoreShubhzsNo ratings yet
- GSM Controlled DC Motor Using AT CommandsDocument6 pagesGSM Controlled DC Motor Using AT Commandstalk2neel12No ratings yet
- Sensored FOC of PMSMDocument37 pagesSensored FOC of PMSMRintuMathunniNo ratings yet
- Sensored FOC of PMSM - XL - BPDocument48 pagesSensored FOC of PMSM - XL - BPmanikanta241No ratings yet
- Sensored FOC of PMSM PDFDocument37 pagesSensored FOC of PMSM PDFGenaro Bessa CeppoNo ratings yet
- Sensorless FOC of ACIDocument43 pagesSensorless FOC of ACIdimitaringNo ratings yet
- Trapezoidal Control of BLDC Motors Using Hall SensorsDocument33 pagesTrapezoidal Control of BLDC Motors Using Hall Sensorstoggle123No ratings yet
- WEGSM1 ManualDocument15 pagesWEGSM1 Manualshinkentom2No ratings yet
- Trapezoidal Control of BLDC Motors Using Hall Effect SensorsDocument33 pagesTrapezoidal Control of BLDC Motors Using Hall Effect SensorsYang ElvisQUNo ratings yet
- Advantest r6441 DMM User ManualDocument263 pagesAdvantest r6441 DMM User Manualhieuhuech1No ratings yet
- sprc990 PDFDocument80 pagessprc990 PDF01689373477No ratings yet
- TDS7000 SeriesDocument254 pagesTDS7000 Serieshieuhuech1No ratings yet
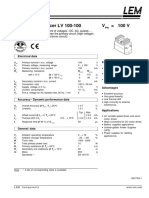
- Lem Voltage 100-500Document2 pagesLem Voltage 100-500hieuhuech1No ratings yet
- DC Motor TestDocument13 pagesDC Motor TestAjit KalelNo ratings yet
- D SPACEtutorialDocument38 pagesD SPACEtutorialAsger Jørgen Thor HansenNo ratings yet
- PCR 500lDocument144 pagesPCR 500lhieuhuech1No ratings yet
- 2SP0115T Control IGBT ManualDocument21 pages2SP0115T Control IGBT Manualhieuhuech1No ratings yet
- Tektronix A6303 070390504Document34 pagesTektronix A6303 070390504hieuhuech1No ratings yet
- MPPT Fuzzy Control For Photovoltaic SystemDocument4 pagesMPPT Fuzzy Control For Photovoltaic Systemhieuhuech1No ratings yet
- Sanwa pc500Document42 pagesSanwa pc500hieuhuech1No ratings yet
- R2 T1 Fuzzy Control of PUMADocument4 pagesR2 T1 Fuzzy Control of PUMAhieuhuech1No ratings yet
- Simulation Study On Speed Control of Permanent Magnet Direct-Driven System For Mining ScraperDocument11 pagesSimulation Study On Speed Control of Permanent Magnet Direct-Driven System For Mining Scraperhieuhuech1No ratings yet
- Stator Flux and Speed - HADocument6 pagesStator Flux and Speed - HAhieuhuech1No ratings yet
- Modeling and Simulation of Longwall Scraper Conveyor Considering Operational FaultsDocument13 pagesModeling and Simulation of Longwall Scraper Conveyor Considering Operational FaultshieuhuechNo ratings yet
- 6DOF Motion PlatformDocument3 pages6DOF Motion Platformhieuhuech1No ratings yet
- Guideline For DSPACEDocument8 pagesGuideline For DSPACEhieuhuech1No ratings yet
- Release Notes For Altium Designer Version 17.0.7Document14 pagesRelease Notes For Altium Designer Version 17.0.7hieuhuech1No ratings yet
- Design of A Microcontroller-Based Circuit For Software ProtectionDocument6 pagesDesign of A Microcontroller-Based Circuit For Software Protectionhieuhuech1No ratings yet
- Permanent Magnet Synchronous Motor With Linear Quadratic Speed ControlDocument6 pagesPermanent Magnet Synchronous Motor With Linear Quadratic Speed Controlhieuhuech1No ratings yet
- Algoritmo Genético para MatlabDocument105 pagesAlgoritmo Genético para Matlabbonmarche28No ratings yet
- Such As - So - ThatDocument6 pagesSuch As - So - Thathieuhuech1No ratings yet
- Modeling and Control of A Single-Phase, 10 KW Fuel Cell InverterDocument119 pagesModeling and Control of A Single-Phase, 10 KW Fuel Cell Inverterhieuhuech1No ratings yet
- MSP430 LaunchPad Blink LEDs GuideDocument16 pagesMSP430 LaunchPad Blink LEDs Guidehieuhuech1No ratings yet
- Too... To - So ... ThatDocument3 pagesToo... To - So ... Thathieuhuech1No ratings yet
- Such As - So - ThatDocument6 pagesSuch As - So - Thathieuhuech1No ratings yet
- SIC9762D SISemiconductorsDocument14 pagesSIC9762D SISemiconductorsVaibhavNo ratings yet
- 7.5 KW Vorttek DatasheetDocument2 pages7.5 KW Vorttek DatasheetcarrascohnNo ratings yet
- High Speed Can Bus Transceiver: DescriptionDocument9 pagesHigh Speed Can Bus Transceiver: Descriptionsweety987No ratings yet
- Sony dsr-pdx10 Ver-1.8 SMDocument526 pagesSony dsr-pdx10 Ver-1.8 SMSaulvcr64 PorleyNo ratings yet
- Building WireDocument57 pagesBuilding WireDinesh Guna100% (1)
- LP For SCIENCE 5Document9 pagesLP For SCIENCE 5DARYL SATURNO CORRALNo ratings yet
- Bravo: He Small Pump Package With Big FeaturesDocument5 pagesBravo: He Small Pump Package With Big Featuresvibin globalNo ratings yet
- Breaking Code Read Protection on NXP LPC MicrocontrollersDocument57 pagesBreaking Code Read Protection on NXP LPC MicrocontrollerspaulNo ratings yet
- Marson'S: Power & Distribution TransformerDocument9 pagesMarson'S: Power & Distribution TransformerMind of BeautyNo ratings yet
- Analog I/o ModuleDocument20 pagesAnalog I/o Modulecamus1125No ratings yet
- Module 1 - Introduction To Electronic Communications Systems - ECE0025Document65 pagesModule 1 - Introduction To Electronic Communications Systems - ECE0025CydelMarie PerezNo ratings yet
- Terrasat Communications IBUC 3 - IBUC3G Operations Manual - RevBDocument234 pagesTerrasat Communications IBUC 3 - IBUC3G Operations Manual - RevBAyoola oNo ratings yet
- Entrelec 05Document56 pagesEntrelec 05baurzhan.kunkuzhayevNo ratings yet
- LG+47ln5700 47ln570t 47ln570y 47ln5710 Chassis lb33bDocument119 pagesLG+47ln5700 47ln570t 47ln570y 47ln5710 Chassis lb33bmidominguez0% (1)
- Protected LED Array Driver: Features and Benefits DescriptionDocument19 pagesProtected LED Array Driver: Features and Benefits DescriptionkarimNo ratings yet
- Installation and user guide for PLATINUM invertersDocument90 pagesInstallation and user guide for PLATINUM invertersElyes MbarekNo ratings yet
- Thermoelectric Cooler2Document33 pagesThermoelectric Cooler2Ahmad ShujaNo ratings yet
- Diode IntroDocument34 pagesDiode IntroSachin AroraNo ratings yet
- Electrical Engineer Resume - 3+ Years ExperienceDocument5 pagesElectrical Engineer Resume - 3+ Years ExperienceAri MachaNo ratings yet
- اعطال الموتوراتDocument65 pagesاعطال الموتوراتmoathNo ratings yet
- Zelio Plug-In Relays RXM2AB1JDDocument6 pagesZelio Plug-In Relays RXM2AB1JDAhmedNo ratings yet
- Product Brief QN8036: High Performance Digital FM Transceiver For Portable DevicesDocument3 pagesProduct Brief QN8036: High Performance Digital FM Transceiver For Portable Devicesdeena.karan5281No ratings yet
- EAMCET 2015 - EngineeringDocument26 pagesEAMCET 2015 - EngineeringNeepur Garg100% (1)
- LTC 4060Document20 pagesLTC 4060Sherif EltoukhiNo ratings yet
- America's PowerDocument1 pageAmerica's PoweralabamacoalNo ratings yet