You might also like
- Lifecycle Checklist: Recommended Preventive Maintenance Schedule For 10 Kva+ Upss (Varies by Model)Document1 pageLifecycle Checklist: Recommended Preventive Maintenance Schedule For 10 Kva+ Upss (Varies by Model)Talha Ali KhanNo ratings yet
- AnfisDocument5 pagesAnfisTalha Ali KhanNo ratings yet
- Intelligent Control of A Stepping Motor Drive Using A Hybrid Neuro-Fuzzy ANFIS ApproachDocument11 pagesIntelligent Control of A Stepping Motor Drive Using A Hybrid Neuro-Fuzzy ANFIS ApproachTalha Ali KhanNo ratings yet
- Pattern Recognition of Power System Voltage Stability Using StatiDocument88 pagesPattern Recognition of Power System Voltage Stability Using StatiTalha Ali KhanNo ratings yet
- Matlab Tutorial1Document9 pagesMatlab Tutorial1Asterix100% (6)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (587)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (894)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (399)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (73)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2219)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (265)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (119)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- Welding and Cutting Owner's ManualDocument24 pagesWelding and Cutting Owner's ManualJorge QuintanaNo ratings yet
- Technical Specification: Sr. No. Bullet Camera Specification Name Bid Requirement (Allowed Values)Document8 pagesTechnical Specification: Sr. No. Bullet Camera Specification Name Bid Requirement (Allowed Values)Danger LogNo ratings yet
- IITB EE Undergraduate Course SyllabiiDocument28 pagesIITB EE Undergraduate Course SyllabiiSuvra PattanayakNo ratings yet
- Topic 9Document11 pagesTopic 9Cj GamingNo ratings yet
- Invertec v145sDocument37 pagesInvertec v145sCristian CiocoiuNo ratings yet
- Technical Data Sheet for 25kW 208V 1000Vdc String InvertersDocument2 pagesTechnical Data Sheet for 25kW 208V 1000Vdc String Inverterslalo rivasNo ratings yet
- MB3759 FujitsuDocument27 pagesMB3759 FujitsuCesar ValdexNo ratings yet
- Simulation and Design of SRF Based Control Algorithm For Three Phase Shunt Active Power FilterDocument4 pagesSimulation and Design of SRF Based Control Algorithm For Three Phase Shunt Active Power Filteridescitation100% (1)
- Ring Amplifiers For Switched Capacitor CircuitsDocument15 pagesRing Amplifiers For Switched Capacitor CircuitsJack KangNo ratings yet
- Sliding Mode Control of Active and Reactive Powers Generated by A Doubly-Fed Induction Generator (DFIG)Document14 pagesSliding Mode Control of Active and Reactive Powers Generated by A Doubly-Fed Induction Generator (DFIG)marouan86No ratings yet
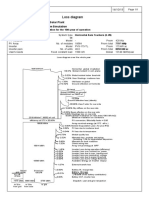
- Loss DiagramDocument1 pageLoss DiagramAahd GhafriNo ratings yet
- Adaptive MPC Current Control-4Document8 pagesAdaptive MPC Current Control-4sainadh saiNo ratings yet
- Pott and Putt SchemeDocument13 pagesPott and Putt SchemeDipayan DasNo ratings yet
- TPH King 60 - 120KVA PDFDocument4 pagesTPH King 60 - 120KVA PDFa.elwahabNo ratings yet
- ZEAS Service ManualDocument156 pagesZEAS Service ManualDaas International0% (1)
- Sanyo Oik Service ManualDocument43 pagesSanyo Oik Service Manualtravieso112No ratings yet
- Power Quality Improvement of Grid Connected Wind Energy System Using Dstatcom-BessDocument11 pagesPower Quality Improvement of Grid Connected Wind Energy System Using Dstatcom-BessUsama RiazNo ratings yet
- Central Inverter: Planning of A PV GeneratorDocument37 pagesCentral Inverter: Planning of A PV Generatorraj sekhar100% (1)
- Powtran Pi 130 InverterDocument113 pagesPowtran Pi 130 InverterClaudiuMaxmiucNo ratings yet
- User Manual: YX2000/3000/3300 Sensorless Vector TypeDocument172 pagesUser Manual: YX2000/3000/3300 Sensorless Vector TypeAlex VargasNo ratings yet
- EEE TitleDocument7 pagesEEE Titlebvkarthik2711No ratings yet
- Poultry InstallationDocument28 pagesPoultry InstallationEletrolm Materiais EletricosNo ratings yet
- Leçon Reparation OnduleursDocument12 pagesLeçon Reparation OnduleursdemonstradomoticsNo ratings yet
- CFW300 Frequency Inverter: Quick Parameter ReferenceDocument2 pagesCFW300 Frequency Inverter: Quick Parameter Referenceubiratan loureiroNo ratings yet
- Inverter Varispeed F7A (KAE-S616-55F)Document98 pagesInverter Varispeed F7A (KAE-S616-55F)Miguel LinaresNo ratings yet
- Lessons from Developing Australia's Moree Solar FarmDocument12 pagesLessons from Developing Australia's Moree Solar Farmmanju100% (1)
- 13 Wind Contrans INGDocument2 pages13 Wind Contrans INGLwin PhyoNo ratings yet
- WEG CFW700 Manual PDFDocument239 pagesWEG CFW700 Manual PDFjose paezNo ratings yet
- LG Ang Multi SplitDocument27 pagesLG Ang Multi Splittrungnq_ktd97No ratings yet
- Solar Load WorksheetDocument2 pagesSolar Load WorksheetohiozuaNo ratings yet