You might also like
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (399)
- TE Time Table Insem 2015 PDFDocument3 pagesTE Time Table Insem 2015 PDFDhondiram Maruthi KakreNo ratings yet
- Be 2012 Course Insem 2015Document7 pagesBe 2012 Course Insem 2015contrasterNo ratings yet
- Paper 15Document3 pagesPaper 15Dhondiram Maruthi KakreNo ratings yet
- 2070 201504 PDFDocument1 page2070 201504 PDFDhondiram Maruthi KakreNo ratings yet
- Admission SE 15-16 - Roll Call ListDocument28 pagesAdmission SE 15-16 - Roll Call ListDhondiram Maruthi KakreNo ratings yet
- 2070 201506 PDFDocument1 page2070 201506 PDFDhondiram Maruthi KakreNo ratings yet
- ApplicationDocument1 pageApplicationDhondiram Maruthi KakreNo ratings yet
- India'S Three Stage Nuclear ProgrammeDocument5 pagesIndia'S Three Stage Nuclear ProgrammeDhondiram Maruthi KakreNo ratings yet
- Admission BE 15-16Document66 pagesAdmission BE 15-16Dhondiram Maruthi KakreNo ratings yet
- Paper 15Document3 pagesPaper 15Dhondiram Maruthi KakreNo ratings yet
- TransNum - Aug 04 - 095317 - Bank Statement PDFDocument5 pagesTransNum - Aug 04 - 095317 - Bank Statement PDFDhondiram Maruthi KakreNo ratings yet
- Paper 15Document3 pagesPaper 15Dhondiram Maruthi KakreNo ratings yet
- 2070 201506 PDFDocument1 page2070 201506 PDFDhondiram Maruthi KakreNo ratings yet
- 2070 201505 PDFDocument1 page2070 201505 PDFDhondiram Maruthi KakreNo ratings yet
- BE June 15 Attendance PQDocument15 pagesBE June 15 Attendance PQDhondiram Maruthi KakreNo ratings yet
- TE 15 Attendance Theory June 2015Document9 pagesTE 15 Attendance Theory June 2015Dhondiram Maruthi KakreNo ratings yet
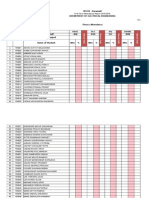
- Class: SE: VPCOE, Baramati First Term Attendance Report 2015-2016 Department of Electrical EngineeringDocument16 pagesClass: SE: VPCOE, Baramati First Term Attendance Report 2015-2016 Department of Electrical EngineeringDhondiram Maruthi KakreNo ratings yet
- BE June 15 AttendanceDocument15 pagesBE June 15 AttendanceDhondiram Maruthi KakreNo ratings yet
- BE Aug 15 AttendanceDocument6 pagesBE Aug 15 AttendanceDhondiram Maruthi KakreNo ratings yet
- India'S Three Stage Nuclear ProgrammeDocument5 pagesIndia'S Three Stage Nuclear ProgrammeDhondiram Maruthi KakreNo ratings yet
- Sandip Randive Open PDFDocument1 pageSandip Randive Open PDFDhondiram Maruthi KakreNo ratings yet
- BE Aug 15 AttendanceDocument12 pagesBE Aug 15 AttendanceDhondiram Maruthi KakreNo ratings yet
- FE Roll Call List for VPCOE, BaramatiDocument21 pagesFE Roll Call List for VPCOE, BaramatiDhondiram Maruthi KakreNo ratings yet
- Sandip Randive Open PDFDocument1 pageSandip Randive Open PDFDhondiram Maruthi KakreNo ratings yet
- Vidya Pratishthan'S College of Engineering, Baramati Fe Academic Calendar Semester - I (2015-2016)Document4 pagesVidya Pratishthan'S College of Engineering, Baramati Fe Academic Calendar Semester - I (2015-2016)Dhondiram Maruthi KakreNo ratings yet
- VPCOE Baramati BEE Practical Course Plan 2015-16Document2 pagesVPCOE Baramati BEE Practical Course Plan 2015-16Dhondiram Maruthi KakreNo ratings yet
- Chaitanya Kulkarni Open PDFDocument1 pageChaitanya Kulkarni Open PDFDhondiram Maruthi KakreNo ratings yet
- Vidya Pratishthan'S College of Engineering, Baramati Fe Academic Calendar Semester - I (2015-2016)Document4 pagesVidya Pratishthan'S College of Engineering, Baramati Fe Academic Calendar Semester - I (2015-2016)Dhondiram Maruthi KakreNo ratings yet
- BE June 15 Attendance PQDocument15 pagesBE June 15 Attendance PQDhondiram Maruthi KakreNo ratings yet
- Presentation PDFDocument1 pagePresentation PDFDhondiram Maruthi KakreNo ratings yet
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (894)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (587)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (265)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (73)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2219)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (119)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- Assignment - Final TestDocument3 pagesAssignment - Final TestbahilashNo ratings yet
- Todo Matic PDFDocument12 pagesTodo Matic PDFSharrife JNo ratings yet
- Typical T Intersection On Rural Local Road With Left Turn LanesDocument1 pageTypical T Intersection On Rural Local Road With Left Turn Lanesahmed.almakawyNo ratings yet
- Felizardo C. Lipana National High SchoolDocument3 pagesFelizardo C. Lipana National High SchoolMelody LanuzaNo ratings yet
- Fast Aldol-Tishchenko ReactionDocument5 pagesFast Aldol-Tishchenko ReactionRSLNo ratings yet
- Unr Ece R046Document74 pagesUnr Ece R046rianteri1125No ratings yet
- Easa Management System Assessment ToolDocument40 pagesEasa Management System Assessment ToolAdam Tudor-danielNo ratings yet
- Rapport DharaviDocument23 pagesRapport DharaviUrbanistes du MondeNo ratings yet
- History of Microfinance in NigeriaDocument9 pagesHistory of Microfinance in Nigeriahardmanperson100% (1)
- Committee History 50yearsDocument156 pagesCommittee History 50yearsd_maassNo ratings yet
- The Smith Generator BlueprintsDocument36 pagesThe Smith Generator BlueprintsZoran AleksicNo ratings yet
- Applied Statics and Strength of Materials 6th Edition Ebook PDFDocument61 pagesApplied Statics and Strength of Materials 6th Edition Ebook PDFteri.sanborn87695% (44)
- Big Joe Pds30-40Document198 pagesBig Joe Pds30-40mauro garciaNo ratings yet
- Brochure en 2014 Web Canyon Bikes How ToDocument36 pagesBrochure en 2014 Web Canyon Bikes How ToRadivizija PortalNo ratings yet
- Aries Computer Repair SolutionsDocument9 pagesAries Computer Repair SolutionsedalzurcNo ratings yet
- The Dominant Regime Method - Hinloopen and Nijkamp PDFDocument20 pagesThe Dominant Regime Method - Hinloopen and Nijkamp PDFLuiz Felipe GuaycuruNo ratings yet
- Get Oracle Order DetailsDocument4 pagesGet Oracle Order Detailssiva_lordNo ratings yet
- Differential Pulse Code ModulationDocument12 pagesDifferential Pulse Code ModulationNarasimhareddy MmkNo ratings yet
- ERIKS Dynamic SealsDocument28 pagesERIKS Dynamic Sealsdd82ddNo ratings yet
- Service Manual: Precision SeriesDocument32 pagesService Manual: Precision SeriesMoises ShenteNo ratings yet
- Induction ClassesDocument20 pagesInduction ClassesMichelle MarconiNo ratings yet
- List of Reactive Chemicals - Guardian Environmental TechnologiesDocument69 pagesList of Reactive Chemicals - Guardian Environmental TechnologiesGuardian Environmental TechnologiesNo ratings yet
- Extrajudicial Settlement of Estate Rule 74, Section 1 ChecklistDocument8 pagesExtrajudicial Settlement of Estate Rule 74, Section 1 ChecklistMsyang Ann Corbo DiazNo ratings yet
- Journals OREF Vs ORIF D3rd RadiusDocument9 pagesJournals OREF Vs ORIF D3rd RadiusironNo ratings yet
- Use Visual Control So No Problems Are Hidden.: TPS Principle - 7Document8 pagesUse Visual Control So No Problems Are Hidden.: TPS Principle - 7Oscar PinillosNo ratings yet
- I Will Be Here TABSDocument7 pagesI Will Be Here TABSEric JaoNo ratings yet
- There Is There Are Exercise 1Document3 pagesThere Is There Are Exercise 1Chindy AriestaNo ratings yet
- Revision Worksheet - Matrices and DeterminantsDocument2 pagesRevision Worksheet - Matrices and DeterminantsAryaNo ratings yet
- Assignment Gen PsyDocument3 pagesAssignment Gen PsyHelenNo ratings yet
- Embryology-Nervous System DevelopmentDocument157 pagesEmbryology-Nervous System DevelopmentGheavita Chandra DewiNo ratings yet