You might also like
- Real Time Operating System A Complete Guide - 2020 EditionFrom EverandReal Time Operating System A Complete Guide - 2020 EditionNo ratings yet
- Path Following For A Differential Drive Robot - MATLAB & Simulink ExampleDocument8 pagesPath Following For A Differential Drive Robot - MATLAB & Simulink Exampletdit84No ratings yet
- Collision Avoidance Control With SteeringDocument7 pagesCollision Avoidance Control With SteeringDavid MartínezNo ratings yet
- Autonomous Pedestrian Collision Avoidance Using A Fuzzy Steering ControllerDocument12 pagesAutonomous Pedestrian Collision Avoidance Using A Fuzzy Steering ControllerSundar C EceNo ratings yet
- Pradeep Seminar ReportDocument28 pagesPradeep Seminar ReportNEERAJNo ratings yet
- BA Waypoint NavigationDocument131 pagesBA Waypoint Navigationartist-bossNo ratings yet
- 0TH ReviewDocument10 pages0TH ReviewAkash KamalNo ratings yet
- 4road Damage DetectionDocument46 pages4road Damage DetectionAjit RajNo ratings yet
- Research ProposalDocument1 pageResearch ProposalSowmitraDasNo ratings yet
- Object Detection Using Convolution Al Neural NetworksDocument6 pagesObject Detection Using Convolution Al Neural NetworksAnita JaiswalNo ratings yet
- Chapter 2 - Literature Reviews: 2.1 Application of Electronic in AutomotiveDocument23 pagesChapter 2 - Literature Reviews: 2.1 Application of Electronic in AutomotiveMuhamad AdibNo ratings yet
- Motion Blur Detection and Removal in ImagesDocument3 pagesMotion Blur Detection and Removal in ImagesInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- Accident Protection System Using Electromagnetic Abs Braking SystemDocument26 pagesAccident Protection System Using Electromagnetic Abs Braking SystemCODING CHANNELNo ratings yet
- Intelligent Driving System: Bachelor of TechnologyDocument20 pagesIntelligent Driving System: Bachelor of TechnologyRajaNo ratings yet
- Image Processing in Road Traf C AnalysisDocument11 pagesImage Processing in Road Traf C AnalysisAshwiini Vigna BasuthkarNo ratings yet
- Object Motion Detection in Video Frames Using Background Frame MatchingDocument4 pagesObject Motion Detection in Video Frames Using Background Frame MatchingseventhsensegroupNo ratings yet
- Title in Caps (Font Size 16) : Visvesvaraya Technological University, BelagaviDocument11 pagesTitle in Caps (Font Size 16) : Visvesvaraya Technological University, Belagavidarshan kuppaswamyNo ratings yet
- Ultrasonic Glasses For Blinds 3Document19 pagesUltrasonic Glasses For Blinds 3shradha anandNo ratings yet
- Enclosure Design Bud - Handbook PDFDocument28 pagesEnclosure Design Bud - Handbook PDFRajesh Sivasankaran100% (1)
- Object PDFDocument6 pagesObject PDFsudheerNo ratings yet
- Motion DetectionDocument33 pagesMotion DetectionChetan TurkaneNo ratings yet
- Road Accident Prevention Using OpenCVDocument4 pagesRoad Accident Prevention Using OpenCVInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- Vehicle Anti Collision Using Ultrasonic SignalsDocument22 pagesVehicle Anti Collision Using Ultrasonic SignalsAakash GuptaNo ratings yet
- Hawassa University: Institute of Technology Faculty of Manufacturing Engineering Department of Mechanical EngineeringDocument25 pagesHawassa University: Institute of Technology Faculty of Manufacturing Engineering Department of Mechanical EngineeringYosef TesfayeNo ratings yet
- Image Segmentation For Object Detection Using Mask R-CNN in ColabDocument5 pagesImage Segmentation For Object Detection Using Mask R-CNN in ColabGRD JournalsNo ratings yet
- Rao & Naidu Engineering College: Topic: Embedded Systems SUB: Automation of CarsDocument9 pagesRao & Naidu Engineering College: Topic: Embedded Systems SUB: Automation of Carsapi-19799369100% (1)
- Toaster Oven Control SystemDocument12 pagesToaster Oven Control SystemfaridrahmanNo ratings yet
- ES 22 Lab ManualDocument33 pagesES 22 Lab ManualRoselle Joy Dela CruzNo ratings yet
- Final Pick and Place ReportDocument48 pagesFinal Pick and Place ReportPraveen D JadhavNo ratings yet
- Design of Intelligent Ambulance and Traffic Control RFDocument12 pagesDesign of Intelligent Ambulance and Traffic Control RFBala GaneshNo ratings yet
- Obstacle Avoiding Robot 1920Document13 pagesObstacle Avoiding Robot 1920Abhishek ViraleNo ratings yet
- The Concept of Crashless Cars &: Anti Collision DevicesDocument2 pagesThe Concept of Crashless Cars &: Anti Collision Devicessourabh ChoudhuryNo ratings yet
- FYPpptDocument40 pagesFYPpptCosmk1ng Zero-1No ratings yet
- Synopsis Object DetectionDocument7 pagesSynopsis Object Detectionkartik sangNo ratings yet
- ConclusionsDocument2 pagesConclusionsseehari0% (1)
- A Review of Deep Learning Methods and Applications For PDFDocument14 pagesA Review of Deep Learning Methods and Applications For PDFershadNo ratings yet
- Lab ManualDocument24 pagesLab ManualASHVINI GAUTAMNo ratings yet
- Robotics in ManufacturingDocument8 pagesRobotics in ManufacturingJadelyn MangondatoNo ratings yet
- Real Time Bangladeshi License Plate Detection & Recognition: Submitted byDocument25 pagesReal Time Bangladeshi License Plate Detection & Recognition: Submitted byHomaira AlamNo ratings yet
- Classification Using Deep Learning NetworksDocument27 pagesClassification Using Deep Learning NetworksWaheed NangigaddaNo ratings yet
- Visvesvaraya Technological University, Belgaum: Technical Seminar Report OnDocument18 pagesVisvesvaraya Technological University, Belgaum: Technical Seminar Report OnShyam RajNo ratings yet
- Unit 21 PDFDocument45 pagesUnit 21 PDFNishanth VallabhadasuNo ratings yet
- A Review On Deep Learning ApplicationsDocument11 pagesA Review On Deep Learning ApplicationsDr.Chitra DhawaleNo ratings yet
- Robot Motion Planning: Approaches and Research IssuesDocument26 pagesRobot Motion Planning: Approaches and Research IssuesRahul KalaNo ratings yet
- Matlab ManualDocument16 pagesMatlab Manualishan varshneyNo ratings yet
- Sensor Fusion of Differential Gps and Inertial Measuring Unit To Measure State of A Test VehicleDocument216 pagesSensor Fusion of Differential Gps and Inertial Measuring Unit To Measure State of A Test VehicleRăzvan PopaNo ratings yet
- Ai in RoboticsDocument83 pagesAi in RoboticsMahmoud RashwanNo ratings yet
- Solar Panelled RoadDocument7 pagesSolar Panelled RoadSreeraj PtyNo ratings yet
- MotionControlTerminologyPrimerv2 PDFDocument2 pagesMotionControlTerminologyPrimerv2 PDFFouad ElhajjiNo ratings yet
- Transport Company ComputerizationDocument1 pageTransport Company ComputerizationRohan SinghNo ratings yet
- Web of Science and Web of KnowledgeDocument10 pagesWeb of Science and Web of KnowledgenirnawulanNo ratings yet
- Single Shot DetectionDocument8 pagesSingle Shot DetectionDaniel FleuryNo ratings yet
- My Seminar PPT - 1490697694118Document25 pagesMy Seminar PPT - 1490697694118basavaraj hagaratagiNo ratings yet
- Object DetectionDocument4 pagesObject DetectionnamanNo ratings yet
- Contents of ThesisDocument75 pagesContents of ThesisOlyadNo ratings yet
- 2013 Robotics RoadmapDocument137 pages2013 Robotics RoadmapRoberto OliverioNo ratings yet
- LTCC and HTCC PDFDocument3 pagesLTCC and HTCC PDFPhan Xuân TuấnNo ratings yet
- Mayank FinalprojectDocument74 pagesMayank FinalprojectPathikrit GuhaNo ratings yet
- Obstacle Avoidance Subsystem For An Autonomous RobotDocument51 pagesObstacle Avoidance Subsystem For An Autonomous RobotAndré QuirinoNo ratings yet
- Au4000 Web Handbook Iss 9Document55 pagesAu4000 Web Handbook Iss 9André QuirinoNo ratings yet
- Au4000 LeafletDocument2 pagesAu4000 LeafletAndré QuirinoNo ratings yet
- A LIDAR-Based Crop Height Measurement System For Miscanthus GiganteusDocument7 pagesA LIDAR-Based Crop Height Measurement System For Miscanthus GiganteusAndré QuirinoNo ratings yet
- RegadorDocument9 pagesRegadorgaelNo ratings yet
- Van Der Zande GBL Measurement Setup 2006Document14 pagesVan Der Zande GBL Measurement Setup 2006André QuirinoNo ratings yet
- Accuracy and Feasibility of Optoelectronic Sensors For Weed Mapping in Wide Row CropsDocument15 pagesAccuracy and Feasibility of Optoelectronic Sensors For Weed Mapping in Wide Row CropsAndré QuirinoNo ratings yet
- Georeferenced LiDAR 3D Vine Plantation Map GenerationDocument20 pagesGeoreferenced LiDAR 3D Vine Plantation Map GenerationAndré QuirinoNo ratings yet
- Obstacle Avoidance Subsystem For An Autonomous RobotDocument51 pagesObstacle Avoidance Subsystem For An Autonomous RobotAndré QuirinoNo ratings yet
- Blenkinsopp 2012 Application of LiDARDocument5 pagesBlenkinsopp 2012 Application of LiDARAndré QuirinoNo ratings yet
- A LIDAR-Based Crop Height Measurement System For Miscanthus GiganteusDocument7 pagesA LIDAR-Based Crop Height Measurement System For Miscanthus GiganteusAndré QuirinoNo ratings yet
- Sensors 11 02166Document9 pagesSensors 11 02166André QuirinoNo ratings yet
- Vision Guided Precision CultivationDocument18 pagesVision Guided Precision CultivationAndré QuirinoNo ratings yet
- Using The Xbox Kinect Sensor For Positional Data AcquisitionDocument14 pagesUsing The Xbox Kinect Sensor For Positional Data AcquisitionAndré QuirinoNo ratings yet
- Remotesensing 03 01691Document19 pagesRemotesensing 03 01691André QuirinoNo ratings yet
- A LIDAR-Based Crop Height Measurement System For Miscanthus GiganteusDocument7 pagesA LIDAR-Based Crop Height Measurement System For Miscanthus GiganteusAndré QuirinoNo ratings yet
- Deposits Can ManualDocument17 pagesDeposits Can ManualAndré QuirinoNo ratings yet
- Internal Gear Pumps: Series QXDocument32 pagesInternal Gear Pumps: Series QXtecnicomanelNo ratings yet
- Towbar New HT-47SDocument1 pageTowbar New HT-47SAnselmo Alvarez GonzalezNo ratings yet
- Design of Engine Stand For Inline Type Engines. Final Year ProjectDocument71 pagesDesign of Engine Stand For Inline Type Engines. Final Year ProjectTolasa NamomsaNo ratings yet
- Hydraulics Outriggers LTM 1120 1Document9 pagesHydraulics Outriggers LTM 1120 1mohamedNo ratings yet
- Review of Maglev Train Technologies: IEEE Transactions On Magnetics August 2006Document10 pagesReview of Maglev Train Technologies: IEEE Transactions On Magnetics August 2006Vaibhav SharmaNo ratings yet
- Early Estimates of Motor Vehicle Traffic Fatalities and Fatality Rate by Sub-Categories in 2021Document10 pagesEarly Estimates of Motor Vehicle Traffic Fatalities and Fatality Rate by Sub-Categories in 2021Katie CrolleyNo ratings yet
- C4 1.6i Petrol Engine Bay Fuse Box BSI Fuse AllocationDocument5 pagesC4 1.6i Petrol Engine Bay Fuse Box BSI Fuse AllocationCarlos Oswaldo Garzon BarajasNo ratings yet
- An Overview To Industrial Arts ModuleDocument44 pagesAn Overview To Industrial Arts ModuleEla Sofia ArnaizNo ratings yet
- Simulia SCN 1012Document24 pagesSimulia SCN 1012kglorstadNo ratings yet
- Landfill CompactionDocument8 pagesLandfill CompactionMuhaiminNo ratings yet
- A Review Paper On Challenges and Opportunities in Battery TechnologiesDocument3 pagesA Review Paper On Challenges and Opportunities in Battery TechnologiesVIVA-TECH IJRINo ratings yet
- Rs 3 Sportback-A1mdsnfvDocument11 pagesRs 3 Sportback-A1mdsnfvMotswadisi Abram NoeNo ratings yet
- Reverse Gear MechanismDocument4 pagesReverse Gear MechanismJose Luis Llerena FloresNo ratings yet
- Fire QAPDocument2 pagesFire QAPSuryadev singhNo ratings yet
- Gear Lubrication FZG Wind TurbinesDocument9 pagesGear Lubrication FZG Wind Turbinesrbulnes2350No ratings yet
- Challenger XPJavelin NotesDocument25 pagesChallenger XPJavelin NotesAlex CunilleNo ratings yet
- Observe The Operation of Single Cylinder 4 Stroke Cycle Air Cooled /water Cooled Diesel EngineDocument3 pagesObserve The Operation of Single Cylinder 4 Stroke Cycle Air Cooled /water Cooled Diesel EngineSydur RahamanNo ratings yet
- Ravi ResumeDocument3 pagesRavi ResumeDolly RajputNo ratings yet
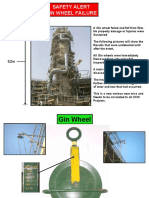
- Safety Alert Gin Wheel FailureDocument8 pagesSafety Alert Gin Wheel Failurerodman823No ratings yet
- Asd 12Document2 pagesAsd 12ab hadi hafizin ab kaharNo ratings yet
- Mapa de Sensores Caex 930EDocument7 pagesMapa de Sensores Caex 930EBASE MINECARE CERREJONNo ratings yet
- Blue Dynamic: Order InformationDocument2 pagesBlue Dynamic: Order InformationTanveer AhmedNo ratings yet
- Services - Halfords UKDocument6 pagesServices - Halfords UKdfNo ratings yet
- Security Indicator: Immobilizer System Symptom Troubleshooting InformationDocument34 pagesSecurity Indicator: Immobilizer System Symptom Troubleshooting InformationrankiadNo ratings yet
- FML Questions 2018 Entry Batch PDFDocument11 pagesFML Questions 2018 Entry Batch PDF5 engineer TejasNo ratings yet
- XG491Q MeDocument9 pagesXG491Q MeHernan CarNo ratings yet
- 6.2. TW63 - Operating Manual - English PDFDocument72 pages6.2. TW63 - Operating Manual - English PDFВячеслав ЩетинниковNo ratings yet
- GS Cult New Unit Militia RulesDocument4 pagesGS Cult New Unit Militia RulesCorwen BrochNo ratings yet
- Parts Cataloque 2006Document47 pagesParts Cataloque 2006keesNo ratings yet
- Guide Book - SMT2 Eco-Ta - 6.2Document38 pagesGuide Book - SMT2 Eco-Ta - 6.2Automotive ElectronicsNo ratings yet