You might also like
- Desing For OperabiliyDocument10 pagesDesing For OperabiliydavidmenesesrNo ratings yet
- A Review of Optimal Planning of Level and Raise Spacing in Inclined Narrow ReefsDocument9 pagesA Review of Optimal Planning of Level and Raise Spacing in Inclined Narrow ReefspaulogmelloNo ratings yet
- A Comparison of Limit Equilibrium and Numerical Modelling Approaches To Risk Analysis For Open Pit MiningDocument10 pagesA Comparison of Limit Equilibrium and Numerical Modelling Approaches To Risk Analysis For Open Pit MiningdavidmenesesrNo ratings yet
- 602 200315 Syama Gold Mine To Move To Underground Mining by 2017Document3 pages602 200315 Syama Gold Mine To Move To Underground Mining by 2017davidmenesesrNo ratings yet
- A Case Study Application of Linear Programming and Simulation To Mine PlanningDocument8 pagesA Case Study Application of Linear Programming and Simulation To Mine PlanningdavidmenesesrNo ratings yet
- 1637138Document40 pages1637138davidmenesesrNo ratings yet
- ASX - MBL Debt Hedging Thunderbox Decision FinalDocument25 pagesASX - MBL Debt Hedging Thunderbox Decision FinaldavidmenesesrNo ratings yet
- A Case Study Application of Linear Programming and Simulation To Mine PlanningDocument8 pagesA Case Study Application of Linear Programming and Simulation To Mine PlanningdavidmenesesrNo ratings yet
- Mil STD 105dDocument68 pagesMil STD 105dGabriel BeloqueNo ratings yet
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (399)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (894)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (587)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (265)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (73)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2219)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (119)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- Detail A: STEEL BEAM (300x150x6.5x9)Document1 pageDetail A: STEEL BEAM (300x150x6.5x9)Aaris AdeNo ratings yet
- COMPREHENSIVE MUSIC AND ARTS EXAMDocument4 pagesCOMPREHENSIVE MUSIC AND ARTS EXAMChris Patlingrao100% (1)
- F. M. 1Document3 pagesF. M. 1Aashish PardeshiNo ratings yet
- LCD panel and module replacement parts for saleDocument1 pageLCD panel and module replacement parts for saleValeria bolañosNo ratings yet
- Green Finance For Green GrowthDocument24 pagesGreen Finance For Green GrowthSreejith BhattathiriNo ratings yet
- KANSAS CITY Hyatt Regency Hotel Walkways CollapseDocument8 pagesKANSAS CITY Hyatt Regency Hotel Walkways CollapseRafran RoslyNo ratings yet
- Stock PartDocument20 pagesStock PartGReyNo ratings yet
- CTLS Interface Developers GuideDocument242 pagesCTLS Interface Developers GuideLucas Pires SimãoNo ratings yet
- Gta Namaste America Cheat CodesDocument4 pagesGta Namaste America Cheat CodesGaurav PathakNo ratings yet
- Smart Bell Notification System Using IoTDocument3 pagesSmart Bell Notification System Using IoTTony StankNo ratings yet
- Shallow Foundation Assignment 1 (Finals)Document2 pagesShallow Foundation Assignment 1 (Finals)Lensearfwyn NamocatcatNo ratings yet
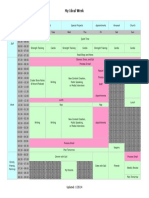
- My Ideal Week PDFDocument1 pageMy Ideal Week PDFAnonymous QE45TVC9e3No ratings yet
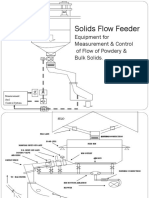
- Solids Flow Feeder Equipment for Precise Measurement & ControlDocument7 pagesSolids Flow Feeder Equipment for Precise Measurement & ControlAbhishek DuttaNo ratings yet
- Lancashire BoilerDocument28 pagesLancashire BoilerDr. BIBIN CHIDAMBARANATHANNo ratings yet
- Operations and Service 69UG15: Diesel Generator SetDocument64 pagesOperations and Service 69UG15: Diesel Generator SetAnonymous NYymdHgyNo ratings yet
- Ansi B 16.34Document22 pagesAnsi B 16.34Vinoth Rajendra100% (2)
- Manual em Portugues DGX230Document120 pagesManual em Portugues DGX230Agosthis0% (1)
- Manual, contact info and schematic for GSM moduleDocument10 pagesManual, contact info and schematic for GSM modulethaiNo ratings yet
- Envea Dusty Manual enDocument26 pagesEnvea Dusty Manual enmikiNo ratings yet
- Compressive Strength, Chloride Diffusivity and Pore Structure of High Performance Metakaolin and Silica Fume ConcreteDocument8 pagesCompressive Strength, Chloride Diffusivity and Pore Structure of High Performance Metakaolin and Silica Fume ConcreteAboalmaail AlaminNo ratings yet
- Service Accessories: CatalogDocument32 pagesService Accessories: CatalogdummaNo ratings yet
- WB4303EDocument1 pageWB4303EcwiksjNo ratings yet
- DBX DriveRack PA 2 BrochureDocument2 pagesDBX DriveRack PA 2 BrochureSound Technology LtdNo ratings yet
- Definitions of CEC2017 Benchmark Suite Final Version UpdatedDocument34 pagesDefinitions of CEC2017 Benchmark Suite Final Version Updatedpc100% (1)
- Ticketreissue PDFDocument61 pagesTicketreissue PDFnicoNicoletaNo ratings yet
- Service Manual Sony MHC-V5Document122 pagesService Manual Sony MHC-V5Enya Andrea Ribba HernandezNo ratings yet
- Solar Powered Automatic Toilet LightDocument10 pagesSolar Powered Automatic Toilet LightarwinNo ratings yet
- KQ2H M1 InchDocument5 pagesKQ2H M1 Inch林林爸爸No ratings yet
- Project Management Book PDFDocument55 pagesProject Management Book PDFSerigne Mbaye Diop94% (16)
- Abstract, CRIMINOLOGYDocument2 pagesAbstract, CRIMINOLOGYvishnu PNo ratings yet