You might also like
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5782)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (890)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (265)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (399)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (587)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (72)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2219)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (119)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- Assuring Food Safety and Quality: Guidelines for Strengthening National Food Control SystemsDocument130 pagesAssuring Food Safety and Quality: Guidelines for Strengthening National Food Control SystemsPedro CampeloNo ratings yet
- Witness Protection Act: Laws of KenyaDocument29 pagesWitness Protection Act: Laws of KenyaDiana WangamatiNo ratings yet
- Task 1Document11 pagesTask 1sheraz ahmadNo ratings yet
- 09 South Africa PPC Cement Full ReportDocument28 pages09 South Africa PPC Cement Full ReportLorena MartínezNo ratings yet
- Fire Risk Assessment Guidance and TemplatesDocument20 pagesFire Risk Assessment Guidance and TemplatesKakira Lions ClubNo ratings yet
- Safety Engineering Techniques Hazard IDDocument20 pagesSafety Engineering Techniques Hazard IDSasidhar ThamilNo ratings yet
- Discussion Paper - Decommissioning Offshore Petroleum Infrastructure in Commonwealth Waters 2018Document95 pagesDiscussion Paper - Decommissioning Offshore Petroleum Infrastructure in Commonwealth Waters 2018Ross WaringNo ratings yet
- Cosmetics Safety Guideline Risk AssessmentDocument40 pagesCosmetics Safety Guideline Risk AssessmentromicaNo ratings yet
- GP 48-04Document27 pagesGP 48-04snikraftar1406No ratings yet
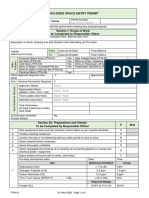
- PTW-01 Enclosed Space Entry Permit (1601608066)Document4 pagesPTW-01 Enclosed Space Entry Permit (1601608066)jayNo ratings yet
- Method Statement of HACKING WORKS ON CONCRETE WALL FOR LIFTDocument3 pagesMethod Statement of HACKING WORKS ON CONCRETE WALL FOR LIFTfaizbukhari100% (2)
- Standard Deliverable List For Feasibility Conceptual FEED Detailed DesignDocument190 pagesStandard Deliverable List For Feasibility Conceptual FEED Detailed Designkere_hore00740% (5)
- Fuses Glasses and CeramicDocument5 pagesFuses Glasses and CeramicAbhijit JanaNo ratings yet
- Azul de metileno-MSDSDocument6 pagesAzul de metileno-MSDSAlejandroNo ratings yet
- Section 5 Health SafetyDocument6 pagesSection 5 Health SafetyArbaz AhmedNo ratings yet
- DatasheetDocument6 pagesDatasheetBruno Miguel Brandão RibeiroNo ratings yet
- JSA-Construction Right of WayDocument3 pagesJSA-Construction Right of Wayfrancis_e_tan100% (5)
- Engineering Standards - Sp10Document29 pagesEngineering Standards - Sp10alexokorieNo ratings yet
- Daily Situational Report: Republic of The Philippines Department of The Interior and Local GovernmentDocument4 pagesDaily Situational Report: Republic of The Philippines Department of The Interior and Local GovernmentBfpcar K PasilNo ratings yet
- nhp002 PDFDocument36 pagesnhp002 PDFMichael SilalahiNo ratings yet
- 600a 35kv Class BT Tap Connector System Installation Instructions Mn650003enDocument20 pages600a 35kv Class BT Tap Connector System Installation Instructions Mn650003endixonNo ratings yet
- Septic Tank Design Computation PDFDocument7 pagesSeptic Tank Design Computation PDFCyril Abad DelfinNo ratings yet
- On-Scene Commander (OSC) and Emergency Control Centre (ECC) Training - ProposalDocument30 pagesOn-Scene Commander (OSC) and Emergency Control Centre (ECC) Training - ProposalAhmad Nazri Mokhtar100% (4)
- 1250 Black SDSDocument4 pages1250 Black SDSkwerwaNo ratings yet
- Risk Assesment FOR CONCRETEDocument12 pagesRisk Assesment FOR CONCRETEAnwar MohiuddinNo ratings yet
- Ahmed - Pinger CISSP Assignment 1 IEC - ODFDocument3 pagesAhmed - Pinger CISSP Assignment 1 IEC - ODFAhmed HussainNo ratings yet
- HSE-RA-040 Marble Fixing Rev 0Document12 pagesHSE-RA-040 Marble Fixing Rev 0عمروNo ratings yet
- F RA 24 Circular SawDocument2 pagesF RA 24 Circular SawAnnie BosmanNo ratings yet
- 10-Personal Emergency Evacuation Plan PEEPDocument6 pages10-Personal Emergency Evacuation Plan PEEPArsh AlamNo ratings yet
- Internal safety assessment report for Shyam TechDocument14 pagesInternal safety assessment report for Shyam TechDwitikrushna RoutNo ratings yet