You might also like
- Tractive Effort PDFDocument8 pagesTractive Effort PDFPrithviraj DagaNo ratings yet
- Design of BeamsDocument28 pagesDesign of BeamsNayan Fatania100% (2)
- Loctite Product SelectionDocument158 pagesLoctite Product SelectionRiki Nurzaman100% (1)
- IrisDocument7 pagesIrisPrithviraj DagaNo ratings yet
- Shot PeeningDocument37 pagesShot PeeningitslowNo ratings yet
- Contact MechanicsDocument14 pagesContact Mechanicsalphading100% (2)
- Sheet Metal Design-Handbook-Rev3 PDFDocument12 pagesSheet Metal Design-Handbook-Rev3 PDFtnchsg100% (1)
- Design of Single Storey RCC Framed BuildingDocument88 pagesDesign of Single Storey RCC Framed BuildingrfgtkoNo ratings yet
- Fillet Weld Research Paper - For UndercuttingDocument7 pagesFillet Weld Research Paper - For UndercuttingHemantNo ratings yet
- Hertzian ContactDocument5 pagesHertzian ContactGanesh R NavadNo ratings yet
- Interactions between Electromagnetic Fields and Matter: Vieweg Tracts in Pure and Applied PhysicsFrom EverandInteractions between Electromagnetic Fields and Matter: Vieweg Tracts in Pure and Applied PhysicsNo ratings yet
- GearboxesDocument24 pagesGearboxesPrithviraj Daga100% (2)
- GE EvolutionDocument16 pagesGE EvolutionPrithviraj DagaNo ratings yet
- Railways Technical InformationDocument88 pagesRailways Technical InformationPrithviraj Daga100% (2)
- Gear DesignDocument20 pagesGear DesignPrithviraj Daga100% (2)
- Shaft CalculationDocument22 pagesShaft CalculationElia MekdadNo ratings yet
- B. Non-Newtonian Fluids - Lecture Notes v. 19.09.2022Document19 pagesB. Non-Newtonian Fluids - Lecture Notes v. 19.09.2022Archit KulkarniNo ratings yet
- SlugDocument1 pageSlugtibor121774_66173108100% (1)
- Contact Stress Analysis of Spur Gear Teeth Pair PDFDocument6 pagesContact Stress Analysis of Spur Gear Teeth Pair PDFCan CemreNo ratings yet
- The Hertzian Contact SurfaceDocument9 pagesThe Hertzian Contact SurfaceMazin El-HagNo ratings yet
- Tutorial On Hertz Contact Stress Xiaoyin ZhuDocument8 pagesTutorial On Hertz Contact Stress Xiaoyin ZhuSravan KumarNo ratings yet
- I J Merr Journal Published PaperDocument6 pagesI J Merr Journal Published PapergarciarodrigoNo ratings yet
- Cosjvl I/: More Complicated To Calculate This Effect For Helical Gears, It Is NevDocument1 pageCosjvl I/: More Complicated To Calculate This Effect For Helical Gears, It Is NevJaimeNo ratings yet
- IEEE Holm 2014Document7 pagesIEEE Holm 2014srinivas rao rayuduNo ratings yet
- Strength of Materials: Theory and ExamplesDocument314 pagesStrength of Materials: Theory and ExamplesNkrumah JoshuaNo ratings yet
- 03 PolarizationDocument4 pages03 PolarizationNeelanjan MandalNo ratings yet
- Critical Stress and Load Conditions ForDocument13 pagesCritical Stress and Load Conditions ForErik DannunzioNo ratings yet
- Tutorial - Hertz Contact Stress: Brian Taylor OPTI521 Fall 2016, SID:23333406Document6 pagesTutorial - Hertz Contact Stress: Brian Taylor OPTI521 Fall 2016, SID:23333406Pramod SharmaNo ratings yet
- Impact Fracture of Rock Materials Due To Percussive Drilling ActionDocument2 pagesImpact Fracture of Rock Materials Due To Percussive Drilling Actioncvlpla55No ratings yet
- Transfer MatrixDocument11 pagesTransfer MatrixRahul DattaNo ratings yet
- Spline Joints PDFDocument5 pagesSpline Joints PDFhayyanadmaNo ratings yet
- Hamilton 1966Document6 pagesHamilton 1966alex thomasNo ratings yet
- A Comparison On Failure Pressures of Cylindrical Pressure VesselsDocument6 pagesA Comparison On Failure Pressures of Cylindrical Pressure VesselsbahmanNo ratings yet
- A Study of Effects of Tooth Surface Wear On Time-Varying Mesh Stiffness of External Spur Gear Considering Wear Evolution ProcessDocument19 pagesA Study of Effects of Tooth Surface Wear On Time-Varying Mesh Stiffness of External Spur Gear Considering Wear Evolution ProcessJuan Jose Barrios OsorioNo ratings yet
- Load Sharing On Spur Gear Teeth and Stress Analysis When Contact Ratio ChangedDocument13 pagesLoad Sharing On Spur Gear Teeth and Stress Analysis When Contact Ratio ChangedKuldeep SharmaNo ratings yet
- A Project On Michaelson InterferometerDocument28 pagesA Project On Michaelson InterferometerMitanshu ThakoreNo ratings yet
- Ph501 Electrodynamics Problem Set 6: Princeton UniversityDocument46 pagesPh501 Electrodynamics Problem Set 6: Princeton UniversityEdgar RamirezNo ratings yet
- Calculation of The Load Capacity of Gear Coupling Based On The Contact StressDocument6 pagesCalculation of The Load Capacity of Gear Coupling Based On The Contact StressEhsanNo ratings yet
- EnergyLossof ParticlesinMatterDocument8 pagesEnergyLossof ParticlesinMatterSafir VazhakkadNo ratings yet
- PC-FT 403: Lecture (3) byDocument62 pagesPC-FT 403: Lecture (3) byFT 19 Suparno DasNo ratings yet
- The Crack Tip Strain Field of AISI 4340: Experimental MeasurementsDocument9 pagesThe Crack Tip Strain Field of AISI 4340: Experimental Measurementsfrederico wlassakNo ratings yet
- Modelling The Static Contact Between A Fingertip and A Rigid Pyramidal SurfaceDocument2 pagesModelling The Static Contact Between A Fingertip and A Rigid Pyramidal SurfaceMOHD MUBASHEER QUADRINo ratings yet
- Contact Analysis On Large Negative Clearance Four-Point Contact Ball BearingDocument5 pagesContact Analysis On Large Negative Clearance Four-Point Contact Ball BearingNabaz MuhamadNo ratings yet
- Encounters With The Golden Ratio in Fluid DynamicsDocument11 pagesEncounters With The Golden Ratio in Fluid DynamicsDeepak Kumar Singh Res. Scholar., Dept. of Mechanical Engg., IIT (BHU)No ratings yet
- Refraction and ReflectionDocument11 pagesRefraction and ReflectionSuresh MedaboinaNo ratings yet
- Nomenclature : 268 / APRIL 1976 Transactions of The ASMEDocument1 pageNomenclature : 268 / APRIL 1976 Transactions of The ASMEJaimeNo ratings yet
- Binding, Stability, and Non-Binding of Multi-Polaron SystemsDocument12 pagesBinding, Stability, and Non-Binding of Multi-Polaron Systemsbmalki68No ratings yet
- Colloids AND Surfaces: Abraham MarmurDocument8 pagesColloids AND Surfaces: Abraham MarmurDžana KadrićNo ratings yet
- Continuum Mechanics 1Document27 pagesContinuum Mechanics 1mad killerNo ratings yet
- Modelling of The Parameters of Acoustic Emission Under Sliding Friction of SolidsDocument9 pagesModelling of The Parameters of Acoustic Emission Under Sliding Friction of Solidsshahnawaz875No ratings yet
- Fracture Mechanics Computer Model For The Calculation of The Contact Fatigue Life of Spur GearsDocument4 pagesFracture Mechanics Computer Model For The Calculation of The Contact Fatigue Life of Spur GearsOmkar KhamkarNo ratings yet
- Skin Effect PDFDocument6 pagesSkin Effect PDFEduard Luka MudriNo ratings yet
- A Fast Wheel-Rail Forces Calculation Computer CodeDocument13 pagesA Fast Wheel-Rail Forces Calculation Computer CodeMattia IaconoNo ratings yet
- On The Compression of A CylinderDocument67 pagesOn The Compression of A CylinderfrankNo ratings yet
- Contact Stress Analysis of Spur Gear Teeth PairDocument7 pagesContact Stress Analysis of Spur Gear Teeth PairTejal IkharNo ratings yet
- Encounters With The Golden Ratio in Fluid Dynamics: M. MokryDocument10 pagesEncounters With The Golden Ratio in Fluid Dynamics: M. MokryLeon BlažinovićNo ratings yet
- An Unsteady Mixed Soft EHL Model, With Application To A Rotary Lip SealDocument6 pagesAn Unsteady Mixed Soft EHL Model, With Application To A Rotary Lip SealAhmed GalalNo ratings yet
- 8403 PDF CH03Document42 pages8403 PDF CH03Fernando SallesNo ratings yet
- State-Of-The-Art of Research On Seismic Pounding Between Buildings With Aligned SlabsDocument24 pagesState-Of-The-Art of Research On Seismic Pounding Between Buildings With Aligned SlabsRui CbNo ratings yet
- 1-Description of Natural Surfaces PDFDocument11 pages1-Description of Natural Surfaces PDFadre traNo ratings yet
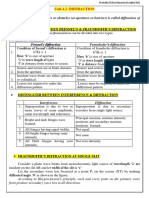
- Light.: Bending of Light at Any Edges or Obstacles (Or Apertures or Barriers) Is Called Diffraction ofDocument7 pagesLight.: Bending of Light at Any Edges or Obstacles (Or Apertures or Barriers) Is Called Diffraction ofĐarling DineshNo ratings yet
- Potential Scattering: 2. Also in This Section, We Consider The Threshold Behaviour WhenDocument54 pagesPotential Scattering: 2. Also in This Section, We Consider The Threshold Behaviour WhenAlessandra Souza BarbosaNo ratings yet
- Apodizing Functions For Fourier Transform Spectroscopy: David A. Naylor and Margaret K. TahicDocument5 pagesApodizing Functions For Fourier Transform Spectroscopy: David A. Naylor and Margaret K. Tahicdaniel7766No ratings yet
- Stick and SlipDocument12 pagesStick and SlipNuring Tyas WicaksonoNo ratings yet
- Ball Bearing Mechanics: Ni/SaDocument107 pagesBall Bearing Mechanics: Ni/SathisisjineshNo ratings yet
- Total Internal ReflectionDocument12 pagesTotal Internal ReflectionHarsh WardhanNo ratings yet
- Sec. 16. Reflection and Refraction of Light at The Interface Between Two Dielectrics. Fresnel'S FormulasDocument29 pagesSec. 16. Reflection and Refraction of Light at The Interface Between Two Dielectrics. Fresnel'S FormulasAlex CostaNo ratings yet
- Lecture 2: Wavefront and Amplitude Division Class of InterferenceDocument8 pagesLecture 2: Wavefront and Amplitude Division Class of InterferenceShouvik MitraNo ratings yet
- 1 s20 S0038080620320370 MainDocument10 pages1 s20 S0038080620320370 MainthalesgmaiaNo ratings yet
- Reflect Oblique CaseDocument36 pagesReflect Oblique CasehkicdkcdkNo ratings yet
- CE645 Discussion 1 Interaction HandoutDocument8 pagesCE645 Discussion 1 Interaction HandoutJoy MondalNo ratings yet
- 09 - Chapter 1Document16 pages09 - Chapter 1Shaik KareemullaNo ratings yet
- Investigations of Bubble-Particle InteractionsDocument16 pagesInvestigations of Bubble-Particle InteractionsMaría Pía Arancibia BravoNo ratings yet
- Advances in Structure Research by Diffraction Methods: Fortschritte der Strukturforschung mit BeugungsmethodenFrom EverandAdvances in Structure Research by Diffraction Methods: Fortschritte der Strukturforschung mit BeugungsmethodenR. BrillNo ratings yet
- Simulation-Based Performance Characterization T MDocument39 pagesSimulation-Based Performance Characterization T MPrithviraj DagaNo ratings yet
- Gear Boxes & Traction DrivesDocument28 pagesGear Boxes & Traction DrivesPrithviraj DagaNo ratings yet
- Tractive Effort Acceleration and BrakingDocument17 pagesTractive Effort Acceleration and BrakingPrithviraj DagaNo ratings yet
- Estimating Energy Consumption EtDocument14 pagesEstimating Energy Consumption EtPrithviraj DagaNo ratings yet
- MotorsDocument64 pagesMotorsPrithviraj DagaNo ratings yet
- Design of Traction DrivesDocument48 pagesDesign of Traction DrivesPrithviraj DagaNo ratings yet
- Lewisr10CM2003 Wheel Profile Evolution PredictionDocument11 pagesLewisr10CM2003 Wheel Profile Evolution PredictionPrithviraj DagaNo ratings yet
- Electrodynamic Suspension SystemDocument88 pagesElectrodynamic Suspension SystemPrithviraj Daga100% (1)
- Lewisr10CM2003 Wheel Profile Evolution PredictionDocument11 pagesLewisr10CM2003 Wheel Profile Evolution PredictionPrithviraj DagaNo ratings yet
- MaglevDocument21 pagesMaglevPrithviraj DagaNo ratings yet
- BT PresentationDocument34 pagesBT PresentationPrithviraj DagaNo ratings yet
- Gear StressDocument12 pagesGear StressPrithviraj Daga100% (1)
- A New CAE Procedure For Railway WheelDocument14 pagesA New CAE Procedure For Railway WheelPrithviraj DagaNo ratings yet
- Testing Enclosures For Ingress ProtectionDocument13 pagesTesting Enclosures For Ingress ProtectionPrithviraj Daga0% (1)
- MD Spur DesignDocument8 pagesMD Spur DesignPrithviraj DagaNo ratings yet
- Sheet Metal Bend AllowanceDocument3 pagesSheet Metal Bend AllowancePrithviraj DagaNo ratings yet
- Bombardier TraxxDocument12 pagesBombardier TraxxPrithviraj DagaNo ratings yet
- Gear DesignDocument18 pagesGear DesignJitendra BagalNo ratings yet
- Transient Stress Analysis On Spur GearDocument8 pagesTransient Stress Analysis On Spur GearPrithviraj DagaNo ratings yet
- What Designers Should Know About Thermal AnalysisDocument12 pagesWhat Designers Should Know About Thermal AnalysisPrithviraj Daga100% (2)
- Simulating Plastics in Drop and Crash TestsDocument8 pagesSimulating Plastics in Drop and Crash TestsPrithviraj DagaNo ratings yet
- Designers Intro To FEA-IIDocument5 pagesDesigners Intro To FEA-IIPrithviraj Daga100% (2)
- 2023 Mechanics of Materials Opening and Chap 1Document66 pages2023 Mechanics of Materials Opening and Chap 1彭莉棋No ratings yet
- Deformation Analysis of Shallow Penetration PDFDocument33 pagesDeformation Analysis of Shallow Penetration PDFDavid Rios FernandezNo ratings yet
- 15.lattice (Cage) Beam Design and Finite Element Analysis of Gantry CraneDocument3 pages15.lattice (Cage) Beam Design and Finite Element Analysis of Gantry CraneravirajNo ratings yet
- Design of Masonry Support Angles USDocument3 pagesDesign of Masonry Support Angles USSugarPOP666No ratings yet
- ISO PLUS Cijevi (Pipes)Document39 pagesISO PLUS Cijevi (Pipes)Gradska toplana - ServisNo ratings yet
- Sandvik Alpha 330:: Drifting and TunnellingDocument3 pagesSandvik Alpha 330:: Drifting and TunnellingFrank HigueraNo ratings yet
- Plaxis Material Models Manual 2016Document218 pagesPlaxis Material Models Manual 2016ggoloNo ratings yet
- Erke Wang-Ansys ContactDocument42 pagesErke Wang-Ansys ContactanilmaviNo ratings yet
- Is: 2062-1981 Mild SteelDocument2 pagesIs: 2062-1981 Mild Steelsuresh kumarNo ratings yet
- Biomimicry in Organizations - B - Fausto TazziDocument96 pagesBiomimicry in Organizations - B - Fausto TazziJanainasoulNo ratings yet
- Machine Design ReviewerDocument4 pagesMachine Design ReviewerNathalie Gyle GalvezNo ratings yet
- Evaluation of Transverse Flange Forces Induced by Laterally Inclined Longitudinal Post-Tensioning in Box Girder BridgesDocument18 pagesEvaluation of Transverse Flange Forces Induced by Laterally Inclined Longitudinal Post-Tensioning in Box Girder Bridgesunix0123No ratings yet
- Training Standard Regarding ShearDocument7 pagesTraining Standard Regarding ShearjologscresenciaNo ratings yet
- MECH 344/M Machine Element DesignDocument75 pagesMECH 344/M Machine Element DesignlitonNo ratings yet
- Ar010Document340 pagesAr010Maritza EnriquezNo ratings yet
- Amendment 1 of IS - 1786-2008Document11 pagesAmendment 1 of IS - 1786-2008sukanta420No ratings yet
- Structural Analysis of Shafts and Bearings For Paddy Thresher PDFDocument6 pagesStructural Analysis of Shafts and Bearings For Paddy Thresher PDFDr. Aung Ko LattNo ratings yet
- Small and Large Strain 1D 2D 3D Consolidation - FredlundDocument23 pagesSmall and Large Strain 1D 2D 3D Consolidation - FredlundAdrian Liviu BugeaNo ratings yet
- Final Long Paper FIB2014Document12 pagesFinal Long Paper FIB2014Matheus L. G. MarquesiNo ratings yet