You might also like
- Light Commercial (Non-Inverter) Catalogue PDFDocument10 pagesLight Commercial (Non-Inverter) Catalogue PDFZaw Moe KhineNo ratings yet
- Fundamentals of Water System DesignDocument1 pageFundamentals of Water System DesignFalak KhanNo ratings yet
- Fundamentals of Psychrometrics SI, 2nd Ed PDFDocument180 pagesFundamentals of Psychrometrics SI, 2nd Ed PDFZaw Moe Khine100% (2)
- 8.0 Engineering Services 8.1. Engineering Services Distribution RoutesDocument8 pages8.0 Engineering Services 8.1. Engineering Services Distribution RoutesZaw Moe KhineNo ratings yet
- ACMV Main Equipments ListDocument15 pagesACMV Main Equipments ListZaw Moe KhineNo ratings yet
- 2014 FGI SustainableDesign HOPDocument20 pages2014 FGI SustainableDesign HOPZaw Moe KhineNo ratings yet
- 13D Form Calculations PDFDocument2 pages13D Form Calculations PDFZaw Moe KhineNo ratings yet
- Chiang Mai AirpDocument5 pagesChiang Mai AirpZaw Moe KhineNo ratings yet
- Fgi Guidelines 2014 Hop TocDocument10 pagesFgi Guidelines 2014 Hop TocZaw Moe KhineNo ratings yet
- Bangkok: Standard Standard Perez 2000-2009 1991-2010Document5 pagesBangkok: Standard Standard Perez 2000-2009 1991-2010Zaw Moe KhineNo ratings yet
- A Tutorial To Getting Started With FHC: Hydraulic Calculation Software For Water Based Fire Protection SystemsDocument7 pagesA Tutorial To Getting Started With FHC: Hydraulic Calculation Software For Water Based Fire Protection SystemsZaw Moe Khine100% (1)
- 201511ERACS.C Air-Cooled ChillerDocument16 pages201511ERACS.C Air-Cooled ChillerZaw Moe KhineNo ratings yet
- PHMC GuidelinesDocument58 pagesPHMC GuidelinesZaw Moe KhineNo ratings yet
- Installing FHC PDFDocument4 pagesInstalling FHC PDFZaw Moe KhineNo ratings yet
- MKS Fluids Compilation: Compliments of Molecular Knowledge SystemsDocument2 pagesMKS Fluids Compilation: Compliments of Molecular Knowledge SystemsZaw Moe KhineNo ratings yet
- Yangon Myanmar 480970 SI UnitsDocument1 pageYangon Myanmar 480970 SI UnitsZaw Moe KhineNo ratings yet
- RI Checklist - MV - AC SystemDocument4 pagesRI Checklist - MV - AC SystemZaw Moe Khine100% (1)
- Checklist - Dry Riser SystemDocument2 pagesChecklist - Dry Riser SystemZaw Moe KhineNo ratings yet
- GMP ListDocument2 pagesGMP ListZaw Moe KhineNo ratings yet
- Fire Damper - FDDocument7 pagesFire Damper - FDZaw Moe KhineNo ratings yet
- Partial Differential Equation - Wikipedia, The Free EncyclopediaDocument20 pagesPartial Differential Equation - Wikipedia, The Free EncyclopediaZaw Moe KhineNo ratings yet
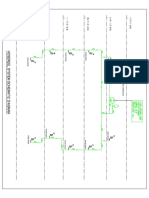
- Hose Reel System Schematic DiagramDocument1 pageHose Reel System Schematic DiagramZaw Moe KhineNo ratings yet
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (400)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (588)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (895)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (345)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (121)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- W5 Kinetics of Particle Impulse Momentum (Ch15)Document74 pagesW5 Kinetics of Particle Impulse Momentum (Ch15)Shah KhanNo ratings yet
- Cbse Xi Physics Test PapersDocument14 pagesCbse Xi Physics Test PapersBhavesh DesaiNo ratings yet
- Universal Coupling (Lab Static Dynamic)Document4 pagesUniversal Coupling (Lab Static Dynamic)Shaktivell Letchumanan0% (2)
- Aircraft Airborne Navigation IDocument104 pagesAircraft Airborne Navigation IRifki FirnandoTPPU 1No ratings yet
- On The Theoretical Link Between Design Parameters and Performance in Cross Flow Fans A Numerical and Experimental Study 2005 Computers and FluidsDocument18 pagesOn The Theoretical Link Between Design Parameters and Performance in Cross Flow Fans A Numerical and Experimental Study 2005 Computers and Fluidsankushanks2591No ratings yet
- Supervised Advance Test - 32Document11 pagesSupervised Advance Test - 32Dhruv BajajNo ratings yet
- Code: Kdm2-1 Title: Basic of Balancing 1.0 Learning Outcome at The End of This Experiment, The Student Should Be Able ToDocument5 pagesCode: Kdm2-1 Title: Basic of Balancing 1.0 Learning Outcome at The End of This Experiment, The Student Should Be Able ToMohd Irman100% (1)
- Forced-Vortex-Flow PDFDocument6 pagesForced-Vortex-Flow PDFAnonymous uVmIIuE9hNo ratings yet
- Rotational Equations of MotionDocument2 pagesRotational Equations of Motionjohn mesNo ratings yet
- 1839-Article Text PDF-5402-1-10-20130303Document7 pages1839-Article Text PDF-5402-1-10-20130303ajay dattNo ratings yet
- PHYSC111-College Physics 1 Syllabus-Spring2013Document6 pagesPHYSC111-College Physics 1 Syllabus-Spring2013Joric MagusaraNo ratings yet
- Free and Force VortexDocument34 pagesFree and Force VortexNur Amira Jasmin100% (1)
- Me 201 Engineering Mechanics Statics3121Document19 pagesMe 201 Engineering Mechanics Statics3121tugskulNo ratings yet
- Automotivesensors Review Ieeesensors2008 PDFDocument22 pagesAutomotivesensors Review Ieeesensors2008 PDFYatheesh KaggereNo ratings yet
- Iso 14243 1 2002 FR PDFDocument8 pagesIso 14243 1 2002 FR PDFRobe01No ratings yet
- Jee 2014 Booklet7 HWT Magnetic Effects of CurrentDocument10 pagesJee 2014 Booklet7 HWT Magnetic Effects of Currentvarunkohliin100% (1)
- Adiabatic ExponentDocument6 pagesAdiabatic ExponentZeeshan Anwar100% (1)
- 14 - Rotor Dynamic Analysis Using ANSYSDocument10 pages14 - Rotor Dynamic Analysis Using ANSYSmhsgh2003No ratings yet
- Chapter 6 Gravitation RevisionDocument8 pagesChapter 6 Gravitation Revision陈伟明No ratings yet
- 2018 Book MotionControlOfUnderactuatedMeDocument230 pages2018 Book MotionControlOfUnderactuatedMe鄭至峻No ratings yet
- Chapter 12 - Rotation of A Rigid Body - SolutionsDocument16 pagesChapter 12 - Rotation of A Rigid Body - SolutionsWendell CapiliNo ratings yet
- 03 - Rotational Motion - Theory & Example Module-2Document32 pages03 - Rotational Motion - Theory & Example Module-2Raju SinghNo ratings yet
- SP MechanicsChapters1 5Document74 pagesSP MechanicsChapters1 5JasdeepSinghNo ratings yet
- Solid State Control of DC MotorDocument31 pagesSolid State Control of DC MotorFong FongNo ratings yet
- CH 10Document59 pagesCH 10Mega LialitaNo ratings yet
- Mechanical Power Transmission SystemsDocument42 pagesMechanical Power Transmission SystemsEricNo ratings yet
- Aci 374.1-05Document9 pagesAci 374.1-05Arshadahc100% (2)
- Module 9 Going PlacesDocument35 pagesModule 9 Going PlacesJudy Panguito Aralar75% (4)
- Physics 1120: Work & Energy Solutions: NC Grav F Spring I 2Document27 pagesPhysics 1120: Work & Energy Solutions: NC Grav F Spring I 2Sundly Talorong ElerioNo ratings yet
- SuccessiveLoopclosurebasedQuadraturecontrol PDFDocument8 pagesSuccessiveLoopclosurebasedQuadraturecontrol PDFValerian SanduNo ratings yet