You might also like
- Part II - AC MotorsDocument30 pagesPart II - AC MotorsYan Liang HaoNo ratings yet
- Sem Qb-II Unit With AnsDocument7 pagesSem Qb-II Unit With AnsSaravanan PillaiNo ratings yet
- 8085 - Lecture - Stepper Motor Interfacing - Prof. RAMDocument6 pages8085 - Lecture - Stepper Motor Interfacing - Prof. RAMKumar AnjeetNo ratings yet
- Single Phase MotorDocument32 pagesSingle Phase MotorsnzaimahNo ratings yet
- Lab 4 Stepper Motor PDFDocument10 pagesLab 4 Stepper Motor PDFIrfan HaiderNo ratings yet
- 9927 CH 9Document25 pages9927 CH 9varaprasad93No ratings yet
- Induction Motor - Double Field Revolving Theory - Universal MotorDocument24 pagesInduction Motor - Double Field Revolving Theory - Universal MotorSree ShobhaNo ratings yet
- Stepper MotorDocument13 pagesStepper Motorjit dharaNo ratings yet
- There Are Few Types of Stepper MotorsDocument41 pagesThere Are Few Types of Stepper Motorsmanoj kumarNo ratings yet
- Brushless DC MotorDocument13 pagesBrushless DC MotorYova PrameswariNo ratings yet
- Chapter 10 Single Phase Motors EE 342Document21 pagesChapter 10 Single Phase Motors EE 342Ali AhmadNo ratings yet
- Induction Motor GK DubeyDocument13 pagesInduction Motor GK Dubeysakshamnegi40069No ratings yet
- Stepper Motors: Stepper Motor vs. Servo MotorDocument13 pagesStepper Motors: Stepper Motor vs. Servo MotorGurwinder Singh100% (1)
- Arbaminch University: Facality of Electrical and Computer Engineering Interface and Micro Computer Progect Steper MotorDocument12 pagesArbaminch University: Facality of Electrical and Computer Engineering Interface and Micro Computer Progect Steper MotorEphrem DanielNo ratings yet
- Brushless DC Electric Motor: Fundamentals of OperationDocument12 pagesBrushless DC Electric Motor: Fundamentals of OperationRaffi SkNo ratings yet
- Variable Reluctance MotorDocument14 pagesVariable Reluctance MotorgbksnNo ratings yet
- Stepper Motor - Types, Advantages and ApplicationsDocument2 pagesStepper Motor - Types, Advantages and ApplicationsBilalNo ratings yet
- Stepper Motor & Servo Motor: S.RavisubramanianDocument78 pagesStepper Motor & Servo Motor: S.RavisubramanianRajesh Vella100% (3)
- A.C Single Phase 4-Pole Squirrel Cage Induction Motor TheoryDocument5 pagesA.C Single Phase 4-Pole Squirrel Cage Induction Motor TheoryCønstäh Van Der WüppertälärîanskíhNo ratings yet
- Unit 2 Single Phase Induction Motor - Watermark PDFDocument21 pagesUnit 2 Single Phase Induction Motor - Watermark PDFPalak Jio100% (1)
- Single Phase Induction MotorDocument10 pagesSingle Phase Induction MotorCarlo Pañares MaglasangNo ratings yet
- Steper MotorsDocument23 pagesSteper MotorsAbdulrhmanNo ratings yet
- What Are The Speed Control Method of Induction MotorsDocument12 pagesWhat Are The Speed Control Method of Induction MotorsRajeev ValunjkarNo ratings yet
- (Single+Three) Phase Induction Motors Interview Questions SetDocument18 pages(Single+Three) Phase Induction Motors Interview Questions SetrajshahieeeNo ratings yet
- Ee 2403 Special Electrical MachinesDocument21 pagesEe 2403 Special Electrical MachinesSurya KrishnanNo ratings yet
- Induction MotorDocument31 pagesInduction MotorAvijitNo ratings yet
- Electrical Machines-II Units-III & IV Questions and AnswersDocument4 pagesElectrical Machines-II Units-III & IV Questions and AnswersJoseph Harindranath100% (2)
- Ese 2021 (Induction)Document52 pagesEse 2021 (Induction)shaileshNo ratings yet
- AC Machine 4Document35 pagesAC Machine 4Fadhil A. HasanNo ratings yet
- DC MACH - Chapter 5Document53 pagesDC MACH - Chapter 5marryjohnopalla05No ratings yet
- Ac MotorsDocument17 pagesAc MotorsPineappleJamNo ratings yet
- CSPDocument8 pagesCSPmeghraj01100% (1)
- Switched Reluctance MotorDocument75 pagesSwitched Reluctance Motor15BEE1120 ISHAV SHARDANo ratings yet
- 1-Phase Induction MotorDocument20 pages1-Phase Induction MotorNure AlamNo ratings yet
- Single Phase Induction MotorsDocument19 pagesSingle Phase Induction MotorsRahulGundeNo ratings yet
- Stepper MotorsDocument53 pagesStepper MotorsirfancardiagnosticNo ratings yet
- EE 448 Laboratory Experiment 4 Introduction To DC MotorsDocument10 pagesEE 448 Laboratory Experiment 4 Introduction To DC MotorsjegjegtNo ratings yet
- Experiment No. 1 Schrage MotorDocument4 pagesExperiment No. 1 Schrage MotorAn00pgadzilla100% (2)
- EMD Important Questions Unit-III Starting MethodsDocument9 pagesEMD Important Questions Unit-III Starting MethodsJoseph HarindranathNo ratings yet
- Stepper Motor: From Wikipedia, The Free EncyclopediaDocument42 pagesStepper Motor: From Wikipedia, The Free EncyclopediaJoeson RosarioNo ratings yet
- AC MotorDocument18 pagesAC MotorCathy IsraelNo ratings yet
- Stepper Motor: Stepper Motors and Their ControllersDocument59 pagesStepper Motor: Stepper Motors and Their ControllersJain Marshel B100% (1)
- Auto Transformer StarterDocument46 pagesAuto Transformer StarterSarthak MishraNo ratings yet
- EET306 Tutorial 3 2018 SolutionDocument11 pagesEET306 Tutorial 3 2018 SolutionShang Divina EbradaNo ratings yet
- Unit I (SM) PDFDocument89 pagesUnit I (SM) PDFshiva sai donthulaNo ratings yet
- Speed Control of Induction MotorDocument26 pagesSpeed Control of Induction MotorrajasekaranNo ratings yet
- Single-Phase Series Motor (Universal) : Motor. However, A Series Motor Which Is Specifically DesignedDocument22 pagesSingle-Phase Series Motor (Universal) : Motor. However, A Series Motor Which Is Specifically Designedshankey12No ratings yet
- DC MachinesDocument9 pagesDC MachinesRishan AkalankaNo ratings yet
- Lectures 5&6Document44 pagesLectures 5&6Yong Jian RongNo ratings yet
- Four Quadrant OperationDocument9 pagesFour Quadrant OperationMOTILAL SUTHAR215291No ratings yet
- Single Phase Motors - Electrical Machines 2 NotesDocument56 pagesSingle Phase Motors - Electrical Machines 2 NotesweirdwolfvortexNo ratings yet
- Induction MotorDocument12 pagesInduction MotorsacchashuddhoNo ratings yet
- Single-Phase MotorsDocument56 pagesSingle-Phase MotorsPrince SharmaNo ratings yet
- Taken From Course Structure 3 Phase Induction MachinesDocument18 pagesTaken From Course Structure 3 Phase Induction MachinesSyed Ahmed MasoodNo ratings yet
- Chapter 2-2 - Induction MotorDocument33 pagesChapter 2-2 - Induction MotorHanis SyafiqNo ratings yet
- 10-Tutorial of Induction MotorDocument48 pages10-Tutorial of Induction Motorrida.hamza.muhammadNo ratings yet
- A New System of Alternating Current Motors and Transformers and Other EssaysFrom EverandA New System of Alternating Current Motors and Transformers and Other EssaysRating: 5 out of 5 stars5/5 (1)
- Advanced Electric Drives: Analysis, Control, and Modeling Using MATLAB / SimulinkFrom EverandAdvanced Electric Drives: Analysis, Control, and Modeling Using MATLAB / SimulinkNo ratings yet
- 110 Waveform Generator Projects for the Home ConstructorFrom Everand110 Waveform Generator Projects for the Home ConstructorRating: 4 out of 5 stars4/5 (1)
- The Importance of Subscale Jet Engine TestingDocument8 pagesThe Importance of Subscale Jet Engine TestingKKayNo ratings yet
- Form WorkDocument12 pagesForm Workdharul khairNo ratings yet
- 09T030 FinalDocument14 pages09T030 FinalKriengsak RuangdechNo ratings yet
- Velocloud OverviewDocument29 pagesVelocloud OverviewFebri RawlinsNo ratings yet
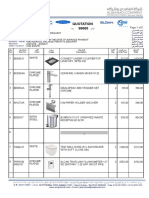
- Quotation 98665Document5 pagesQuotation 98665Reda IsmailNo ratings yet
- BMW X4 (2019-2022) Vs Audi Q5 Vs Land Rover Discovery Sport Vs Mercedes-Benz GLE - CarWaleDocument1 pageBMW X4 (2019-2022) Vs Audi Q5 Vs Land Rover Discovery Sport Vs Mercedes-Benz GLE - CarWaleSahil GoyalNo ratings yet
- 17.4 Boiler and Feed-Water TreatmentDocument28 pages17.4 Boiler and Feed-Water Treatmentnomeacuerdo1No ratings yet
- Connection DiagramsDocument3 pagesConnection Diagramsfahad pirzadaNo ratings yet
- 2x18 AWG Shielded Fire Alarm and Control Cable - 5M11802103Document2 pages2x18 AWG Shielded Fire Alarm and Control Cable - 5M11802103Alvaro Coy H.No ratings yet
- Oil and Wildlife Conservation in UgandaDocument40 pagesOil and Wildlife Conservation in UgandaAfrican Centre for Media ExcellenceNo ratings yet
- Content Beyond SyllabusDocument3 pagesContent Beyond SyllabusRahul PolNo ratings yet
- TabulationDocument13 pagesTabulationWildan PushNo ratings yet
- Hyundai Robex 220LC-9A SpecificationsDocument14 pagesHyundai Robex 220LC-9A SpecificationsKundan DhurveNo ratings yet
- Language Processing System:-: CompilerDocument6 pagesLanguage Processing System:-: CompilerRenganathan rameshNo ratings yet
- April 2016Document68 pagesApril 2016Treatment Plant Operator MagazineNo ratings yet
- Mitsubishi Electric Product OverviewDocument116 pagesMitsubishi Electric Product OverviewPepes HiuuNo ratings yet
- DMIC ProjectDocument33 pagesDMIC ProjectParminder RaiNo ratings yet
- Pd5500 Flange CalculationDocument6 pagesPd5500 Flange CalculationMakrand SakpalNo ratings yet
- CS 303e, Assignment #10: Practice Reading and Fixing Code Due: Sunday, April 14, 2019 Points: 20Document2 pagesCS 303e, Assignment #10: Practice Reading and Fixing Code Due: Sunday, April 14, 2019 Points: 20Anonymous pZ2FXUycNo ratings yet
- AWV39 EAR42W: Acoustic Wall Ventilator Acoustic Window VentilatorDocument1 pageAWV39 EAR42W: Acoustic Wall Ventilator Acoustic Window Ventilatorrita_mendes_1No ratings yet
- Cable Ties DatasheetDocument7 pagesCable Ties DatasheetGovind ChaudhariNo ratings yet
- BEC198 (Finals)Document180 pagesBEC198 (Finals)Lorenz BerroyaNo ratings yet
- Pt. Partono Fondas: Company ProfileDocument34 pagesPt. Partono Fondas: Company Profileiqbal urbandNo ratings yet
- Drive ConfigDocument136 pagesDrive ConfigGiangDoNo ratings yet
- Libeskind Daniel - Felix Nussbaum MuseumDocument6 pagesLibeskind Daniel - Felix Nussbaum MuseumMiroslav MalinovicNo ratings yet
- 1.5SMC Series-1864824 PDFDocument8 pages1.5SMC Series-1864824 PDFRizwan RanaNo ratings yet
- Simple and Compound Gear TrainDocument2 pagesSimple and Compound Gear TrainHendri Yoga SaputraNo ratings yet
- Electric Power Station PDFDocument344 pagesElectric Power Station PDFMukesh KumarNo ratings yet
- 1504805126-HPI - CR-Series Copper Crusher - 04-2021ENDocument1 page1504805126-HPI - CR-Series Copper Crusher - 04-2021ENCaio BittencourtNo ratings yet
- Particle Swarm Optimization - WikipediaDocument9 pagesParticle Swarm Optimization - WikipediaRicardo VillalongaNo ratings yet