You might also like
- Optimal Robust Controller Design For The Ball and Plate SystemDocument4 pagesOptimal Robust Controller Design For The Ball and Plate SystemAra DisNo ratings yet
- Robot Manipulators: Modeling, Performance Analysis and ControlFrom EverandRobot Manipulators: Modeling, Performance Analysis and ControlNo ratings yet
- Modelling and Control of Ball-Plate SystemDocument22 pagesModelling and Control of Ball-Plate SystemJisoo UmNo ratings yet
- Trajectory Tracking Control of Ball and Plate System Based On Auto-Disturbance Rejection ControllerDocument6 pagesTrajectory Tracking Control of Ball and Plate System Based On Auto-Disturbance Rejection ControllerAyushman BaruaNo ratings yet
- 3 Inverted Pendulum ProjectDocument26 pages3 Inverted Pendulum ProjectJoshua D JohnNo ratings yet
- Dieu Khien He Thong Bi Trong Tu TruongDocument5 pagesDieu Khien He Thong Bi Trong Tu TruongNinhĐứcThànhNo ratings yet
- Genetic Algorithm Based Optimal Control For A 6-DOF Non Redundant Stewart ManipulatorDocument7 pagesGenetic Algorithm Based Optimal Control For A 6-DOF Non Redundant Stewart ManipulatorEdith GranadosNo ratings yet
- An Application of Robust Feedback Linearization To A Ball and Beam Control ProblemDocument5 pagesAn Application of Robust Feedback Linearization To A Ball and Beam Control ProblemE Daniel ReyesNo ratings yet
- Ball and Hoop2Document0 pagesBall and Hoop2Parameswararao BillaNo ratings yet
- Ball & Beam DocumentDocument14 pagesBall & Beam DocumentJorge PorrasNo ratings yet
- Design of Optimal Controllers For A Ball & Beam SystemDocument10 pagesDesign of Optimal Controllers For A Ball & Beam SystemGRD JournalsNo ratings yet
- BallonbeamDocument22 pagesBallonbeamYuan HuNo ratings yet
- Application of Intelligent Controller in A Ball and Beam Control SystemDocument16 pagesApplication of Intelligent Controller in A Ball and Beam Control SystemjerrythaNo ratings yet
- Robust Control For A Delta RobotDocument6 pagesRobust Control For A Delta Robotjuanpereza21No ratings yet
- Selby Trapp Final ReportDocument28 pagesSelby Trapp Final ReportothmanNo ratings yet
- Nonlinear Model & Controller Design For Magnetic Levitation System-IsPRADocument5 pagesNonlinear Model & Controller Design For Magnetic Levitation System-IsPRAIshtiaq AhmadNo ratings yet
- Lab 07Document2 pagesLab 07reza66No ratings yet
- AHRS LabDocument12 pagesAHRS Labjoshimeet479No ratings yet
- Feedback Linearization and Notch Filter For A Magnetic Levitation System (MagLev)Document7 pagesFeedback Linearization and Notch Filter For A Magnetic Levitation System (MagLev)Luca MaggioriNo ratings yet
- Controller Design of Inverted Pendulum Using Pole Placement and LQRDocument7 pagesController Design of Inverted Pendulum Using Pole Placement and LQRInternational Journal of Research in Engineering and Technology100% (1)
- Backstepping Algorithm With Sliding Mode Control For Magnetic Levitation SystemDocument5 pagesBackstepping Algorithm With Sliding Mode Control For Magnetic Levitation SystemAlfian MaarifNo ratings yet
- C 11.3-D BUILDING Compatibility ModeDocument18 pagesC 11.3-D BUILDING Compatibility ModejojomarbunNo ratings yet
- Robust Control For A Delta Robot: Hui-Hung Lin, Chih-Chin Wen, Shi-Wei Lin, Yuan-Hung Tai and Chao-Shu LiuDocument6 pagesRobust Control For A Delta Robot: Hui-Hung Lin, Chih-Chin Wen, Shi-Wei Lin, Yuan-Hung Tai and Chao-Shu LiuDandro-LinkNo ratings yet
- Ee 469Document39 pagesEe 469arwa zeglamNo ratings yet
- The Trajectory Tracking Problem For Quadrotor System: Na Zhang and Qing-He WuDocument6 pagesThe Trajectory Tracking Problem For Quadrotor System: Na Zhang and Qing-He WunguyendattdhNo ratings yet
- Spacecraft Formation Flying ControlDocument6 pagesSpacecraft Formation Flying ControlJuan Manuel MauroNo ratings yet
- Robust H Controller For Construction Elevator Drivesystem Vibrations AttenuatorDocument9 pagesRobust H Controller For Construction Elevator Drivesystem Vibrations AttenuatorDr Saba TareqNo ratings yet
- Design and Experiment of A 3DOF Parallel Micro-Mechanism Utilizing Flexure HingesDocument6 pagesDesign and Experiment of A 3DOF Parallel Micro-Mechanism Utilizing Flexure HingesOlgy MarinescuNo ratings yet
- A Robust Optimal Sliding-Mode Control Approach For Magnetic Levitation SystemsDocument8 pagesA Robust Optimal Sliding-Mode Control Approach For Magnetic Levitation Systemsankurgoel1975No ratings yet
- Ball & Beam DocumentDocument8 pagesBall & Beam DocumentJorge PorrasNo ratings yet
- Optimal Control of Double Inverted Pendulum Using LQR ControllerDocument4 pagesOptimal Control of Double Inverted Pendulum Using LQR ControllerSachin SharmaNo ratings yet
- A Comparative Study of Fuzzy Logic and Classical Control With EPICSDocument6 pagesA Comparative Study of Fuzzy Logic and Classical Control With EPICSGanesh NhivekarNo ratings yet
- Robust Control of Active Vehicle Suspension Systems Using Sliding Modes and Differential Flatness With MATLABDocument18 pagesRobust Control of Active Vehicle Suspension Systems Using Sliding Modes and Differential Flatness With MATLABAVALDERNo ratings yet
- THRD PD 29febDocument7 pagesTHRD PD 29febvijay_marathe01No ratings yet
- Modeling and Control of Active Suspension Using Pismc and SMCDocument10 pagesModeling and Control of Active Suspension Using Pismc and SMCjulioandres2011No ratings yet
- Networked Nonlinear Model Predictive Control of The Ball and Beam SystemDocument5 pagesNetworked Nonlinear Model Predictive Control of The Ball and Beam SystemdiegoNo ratings yet
- Hard Disk Drive Servo ControlDocument20 pagesHard Disk Drive Servo ControlMohammad IkhsanNo ratings yet
- Moasaa 08Document6 pagesMoasaa 08Manh Nguyen TienNo ratings yet
- Перко циклыDocument28 pagesПерко циклыНиколай ФедуновNo ratings yet
- Control of Two-Wheels Inverted Pendulum Mobile Robot Using Full Order Sliding Mode ControlDocument6 pagesControl of Two-Wheels Inverted Pendulum Mobile Robot Using Full Order Sliding Mode Controlc0d3rNo ratings yet
- AB Robust Report PendulumInverted1Document16 pagesAB Robust Report PendulumInverted1Sebastian ReyesNo ratings yet
- Teaching 560 945 1527689633Document17 pagesTeaching 560 945 1527689633Mahmood AbuZaidNo ratings yet
- Teaching 560 945 1527689633Document17 pagesTeaching 560 945 1527689633Mahmood AbuZaidNo ratings yet
- m4l30 Lesson 30 The Direct Stiffness Method: Plane FramesDocument23 pagesm4l30 Lesson 30 The Direct Stiffness Method: Plane FramesVitor Vale100% (1)
- Chapter 8: Generation of Floor Response Spectra and Multiple Support Excitation G. R. Reddy & R. K. VermaDocument14 pagesChapter 8: Generation of Floor Response Spectra and Multiple Support Excitation G. R. Reddy & R. K. VermaDivya Dev C MNo ratings yet
- Design of Robust Fuzzy Controllers For Aerospace ApplicationsDocument5 pagesDesign of Robust Fuzzy Controllers For Aerospace ApplicationsRitesh SinghNo ratings yet
- Prediction of Stability and Performance of An Active Mechanical Structure Under Uncertainty Conditions Using Finite Element and Neural ComputationDocument8 pagesPrediction of Stability and Performance of An Active Mechanical Structure Under Uncertainty Conditions Using Finite Element and Neural ComputationHadhoud MécaniqueNo ratings yet
- Esign For A: AbstractDocument5 pagesEsign For A: Abstractsattanic666No ratings yet
- MCT Question BankDocument5 pagesMCT Question BankKalamchety Ravikumar SrinivasaNo ratings yet
- Lecture 1: Preliminary CommentsDocument5 pagesLecture 1: Preliminary CommentsRavi Harish MaulanaNo ratings yet
- Modeling Control and Simulation of Two Axes Gimbal Seeker Using Fuzzy PID ControllerDocument6 pagesModeling Control and Simulation of Two Axes Gimbal Seeker Using Fuzzy PID ControllerRonald CaravacaNo ratings yet
- Observer-Based ControlDocument6 pagesObserver-Based ControlKadir CumaliNo ratings yet
- Controlengg Compiled Sridar (Session 1 8)Document60 pagesControlengg Compiled Sridar (Session 1 8)Prem T RajuNo ratings yet
- Robust Nonlinear Observer For Flexible Joint Robot Manipulators With Only Motor Position MeasurementDocument6 pagesRobust Nonlinear Observer For Flexible Joint Robot Manipulators With Only Motor Position MeasurementinfodotzNo ratings yet
- Modelling and Control of Ball-Plate System PDFDocument22 pagesModelling and Control of Ball-Plate System PDFsolid34100% (1)
- Stability of Linear Feedback SystemDocument49 pagesStability of Linear Feedback SystemNANDHAKUMAR ANo ratings yet
- Loop Shapind Design ProcedureDocument4 pagesLoop Shapind Design ProcedureRitesh SinghNo ratings yet
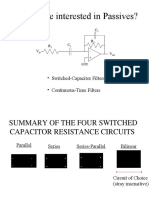
- Why Are We Interested in Passives?: - Switched-Capacitor Filters - Continuous-Time FiltersDocument5 pagesWhy Are We Interested in Passives?: - Switched-Capacitor Filters - Continuous-Time FiltersGiang TepNo ratings yet
- @team Building and Project ManagementDocument262 pages@team Building and Project ManagementGiang TepNo ratings yet
- Motor Fundamentals: 1. Stepper MotorsDocument2 pagesMotor Fundamentals: 1. Stepper MotorsGiang TepNo ratings yet
- For More Explanation See The Example.: So That's Why We Need To Install A Starter With A Motor........Document1 pageFor More Explanation See The Example.: So That's Why We Need To Install A Starter With A Motor........Giang TepNo ratings yet
- Emotionally Intelligent TeacherDocument7 pagesEmotionally Intelligent TeacherShona ShonaNo ratings yet
- Behavior Modification TherapyDocument19 pagesBehavior Modification TherapyJm OpolintoNo ratings yet
- Definition of Second Language Acquisition and LearningDocument48 pagesDefinition of Second Language Acquisition and LearningCres Jules ArdoNo ratings yet
- The Principles of Scientific ManagementDocument7 pagesThe Principles of Scientific ManagementShafaf BhatNo ratings yet
- Oliva Ch05Document27 pagesOliva Ch05AdrianeNo ratings yet
- Conceptualizing Mathematical Reasoning - A Literature ReviewDocument7 pagesConceptualizing Mathematical Reasoning - A Literature ReviewNur AsilahNo ratings yet
- HopeDocument26 pagesHopeRadhaNo ratings yet
- 21458.basic and Advanced Regulatory Control System Design and Application PDFDocument390 pages21458.basic and Advanced Regulatory Control System Design and Application PDFMuktoAhmed100% (3)
- The Leadership Practices InventoryDocument5 pagesThe Leadership Practices Inventorysaad0% (1)
- 0407 FLA 2006 Colville BigBooksDocument20 pages0407 FLA 2006 Colville BigBooksfatiniNo ratings yet
- 7.1 Narrative TherapyDocument16 pages7.1 Narrative TherapyByrel Vergara100% (2)
- Camarines Norte State College College of Education: Republic of The PhilippinesDocument6 pagesCamarines Norte State College College of Education: Republic of The PhilippinesRonald Dalida100% (1)
- Thinking and SpeechDocument246 pagesThinking and Speechchristoffer_jensen_2No ratings yet
- CHANGE MANAGEMENT. Higgs & Rowland (2005) Exploring Approaches To Change & Its LeadershipDocument32 pagesCHANGE MANAGEMENT. Higgs & Rowland (2005) Exploring Approaches To Change & Its LeadershipWirawan Bayu M100% (1)
- The Leadership ChallengeDocument16 pagesThe Leadership Challengeopus57No ratings yet
- Adjustment Range of RXNDocument9 pagesAdjustment Range of RXNSaurabhNo ratings yet
- Socio-Cultural Constructs Defined '10Document4 pagesSocio-Cultural Constructs Defined '10Carolyn FortunaNo ratings yet
- OB 56 Chapter 12 - INP3004 Work MotivationDocument25 pagesOB 56 Chapter 12 - INP3004 Work MotivationberitahrNo ratings yet
- Relationships PresentationDocument14 pagesRelationships PresentationmnogadeNo ratings yet
- Interpretative Phenomenological AnalysisDocument10 pagesInterpretative Phenomenological AnalysisDiego Martinez Santana100% (2)
- Home Environment As A Predictor of Academic Performance of Pupils With Learning Disabilities in Buea, South West Region of CameroonDocument19 pagesHome Environment As A Predictor of Academic Performance of Pupils With Learning Disabilities in Buea, South West Region of CameroonEditor IJTSRDNo ratings yet
- Newell 2005Document8 pagesNewell 2005NICOLÁS ANDRÉS AYELEF PARRAGUEZNo ratings yet
- Beiser - Hegel and NaturphilosophieDocument13 pagesBeiser - Hegel and NaturphilosophieMari van Stokkum100% (1)
- Normative Ethics and Non-Normative EthicsDocument2 pagesNormative Ethics and Non-Normative Ethicscleytonmarques1991No ratings yet
- Laws of Teamwork - Maxwell.ebsDocument8 pagesLaws of Teamwork - Maxwell.ebsĐỗ Lê DuyNo ratings yet
- Meaning Form Within Charismatic and Non Charismatic LeadersDocument15 pagesMeaning Form Within Charismatic and Non Charismatic LeaderstomorNo ratings yet
- Jawahar (200-WPS OfficeDocument4 pagesJawahar (200-WPS OfficeJyotika PatyalNo ratings yet
- A Comparative Study of PerformanceDocument26 pagesA Comparative Study of PerformanceAvijit HiraNo ratings yet
- The Meaning and Measurement of Employee Engagement PDFDocument35 pagesThe Meaning and Measurement of Employee Engagement PDFface2faceNo ratings yet
- Synthesis Reaction Paper 1Document4 pagesSynthesis Reaction Paper 1api-353957387100% (1)
- The Fabric of Civilization: How Textiles Made the WorldFrom EverandThe Fabric of Civilization: How Textiles Made the WorldRating: 4.5 out of 5 stars4.5/5 (58)
- The Beekeeper's Lament: How One Man and Half a Billion Honey Bees Help Feed AmericaFrom EverandThe Beekeeper's Lament: How One Man and Half a Billion Honey Bees Help Feed AmericaNo ratings yet
- The End of Craving: Recovering the Lost Wisdom of Eating WellFrom EverandThe End of Craving: Recovering the Lost Wisdom of Eating WellRating: 4.5 out of 5 stars4.5/5 (82)
- Sully: The Untold Story Behind the Miracle on the HudsonFrom EverandSully: The Untold Story Behind the Miracle on the HudsonRating: 4 out of 5 stars4/5 (103)
- Hero Found: The Greatest POW Escape of the Vietnam WarFrom EverandHero Found: The Greatest POW Escape of the Vietnam WarRating: 4 out of 5 stars4/5 (19)
- Dirt to Soil: One Family’s Journey into Regenerative AgricultureFrom EverandDirt to Soil: One Family’s Journey into Regenerative AgricultureRating: 5 out of 5 stars5/5 (125)
- ChatGPT Money Machine 2024 - The Ultimate Chatbot Cheat Sheet to Go From Clueless Noob to Prompt Prodigy Fast! Complete AI Beginner’s Course to Catch the GPT Gold Rush Before It Leaves You BehindFrom EverandChatGPT Money Machine 2024 - The Ultimate Chatbot Cheat Sheet to Go From Clueless Noob to Prompt Prodigy Fast! Complete AI Beginner’s Course to Catch the GPT Gold Rush Before It Leaves You BehindNo ratings yet
- Pale Blue Dot: A Vision of the Human Future in SpaceFrom EverandPale Blue Dot: A Vision of the Human Future in SpaceRating: 4.5 out of 5 stars4.5/5 (588)
- The Things We Make: The Unknown History of Invention from Cathedrals to Soda CansFrom EverandThe Things We Make: The Unknown History of Invention from Cathedrals to Soda CansNo ratings yet
- The Intel Trinity: How Robert Noyce, Gordon Moore, and Andy Grove Built the World's Most Important CompanyFrom EverandThe Intel Trinity: How Robert Noyce, Gordon Moore, and Andy Grove Built the World's Most Important CompanyNo ratings yet
- Packing for Mars: The Curious Science of Life in the VoidFrom EverandPacking for Mars: The Curious Science of Life in the VoidRating: 4 out of 5 stars4/5 (1396)
- Reality+: Virtual Worlds and the Problems of PhilosophyFrom EverandReality+: Virtual Worlds and the Problems of PhilosophyRating: 4 out of 5 stars4/5 (24)
- Faster: How a Jewish Driver, an American Heiress, and a Legendary Car Beat Hitler's BestFrom EverandFaster: How a Jewish Driver, an American Heiress, and a Legendary Car Beat Hitler's BestRating: 4 out of 5 stars4/5 (28)
- The Weather Machine: A Journey Inside the ForecastFrom EverandThe Weather Machine: A Journey Inside the ForecastRating: 3.5 out of 5 stars3.5/5 (31)
- The Future of Geography: How the Competition in Space Will Change Our WorldFrom EverandThe Future of Geography: How the Competition in Space Will Change Our WorldRating: 4 out of 5 stars4/5 (6)
- A Place of My Own: The Architecture of DaydreamsFrom EverandA Place of My Own: The Architecture of DaydreamsRating: 4 out of 5 stars4/5 (242)
- Broken Money: Why Our Financial System is Failing Us and How We Can Make it BetterFrom EverandBroken Money: Why Our Financial System is Failing Us and How We Can Make it BetterRating: 5 out of 5 stars5/5 (3)
- Four Battlegrounds: Power in the Age of Artificial IntelligenceFrom EverandFour Battlegrounds: Power in the Age of Artificial IntelligenceRating: 5 out of 5 stars5/5 (5)
- How to Build a Car: The Autobiography of the World’s Greatest Formula 1 DesignerFrom EverandHow to Build a Car: The Autobiography of the World’s Greatest Formula 1 DesignerRating: 4.5 out of 5 stars4.5/5 (122)
- How to Build a Car: The Autobiography of the World’s Greatest Formula 1 DesignerFrom EverandHow to Build a Car: The Autobiography of the World’s Greatest Formula 1 DesignerRating: 4.5 out of 5 stars4.5/5 (54)
- Project Management All-in-One For DummiesFrom EverandProject Management All-in-One For DummiesRating: 5 out of 5 stars5/5 (6)
- The Assassination Complex: Inside the Government's Secret Drone Warfare ProgramFrom EverandThe Assassination Complex: Inside the Government's Secret Drone Warfare ProgramRating: 4 out of 5 stars4/5 (55)
- Restoration Agriculture: Real-World Permaculture for FarmersFrom EverandRestoration Agriculture: Real-World Permaculture for FarmersRating: 4.5 out of 5 stars4.5/5 (86)
- The Knowledge: How to Rebuild Our World from ScratchFrom EverandThe Knowledge: How to Rebuild Our World from ScratchRating: 3.5 out of 5 stars3.5/5 (133)