You might also like
- Nikos MIDI Pack - Chord Progression GuideDocument5 pagesNikos MIDI Pack - Chord Progression GuideSamuel ThompsonNo ratings yet
- Time Domain and Frequency Domain Based Identification of Fopdt and SopdtDocument2 pagesTime Domain and Frequency Domain Based Identification of Fopdt and SopdtRam NiceNo ratings yet
- Chapter 10 Tute Solutions PDFDocument7 pagesChapter 10 Tute Solutions PDFAi Tien TranNo ratings yet
- 25 Middlegame Concepts Every Chess Player Must KnowDocument2 pages25 Middlegame Concepts Every Chess Player Must KnowKasparicoNo ratings yet
- Sla At&tDocument2 pagesSla At&tCésar Lainez Lozada TorattoNo ratings yet
- Use of A Hierarchical Skeleton For Spanish Sign Language 3D Representation Over Mobile DevicesDocument4 pagesUse of A Hierarchical Skeleton For Spanish Sign Language 3D Representation Over Mobile Devicespepeconejo123No ratings yet
- A Study of Sign Language Coarticulation: Jérémie SegouatDocument8 pagesA Study of Sign Language Coarticulation: Jérémie SegouatLeonel SerraNo ratings yet
- Multistream Articulatory Feature-Based Models ForDocument8 pagesMultistream Articulatory Feature-Based Models Fordenerys2507986No ratings yet
- Xtension of Hidden Markov Model For Recognizing Large Vocabulary of Sign LanguageDocument10 pagesXtension of Hidden Markov Model For Recognizing Large Vocabulary of Sign LanguageAdam HansenNo ratings yet
- A Wearable Computer Based American Sign Language RecognizerDocument8 pagesA Wearable Computer Based American Sign Language RecognizerJuan Sebastian CifuentesNo ratings yet
- Lip Reading in The WildDocument17 pagesLip Reading in The WildMohammad AkifNo ratings yet
- American Sign Language Pattern RecognitiDocument6 pagesAmerican Sign Language Pattern RecognitisaqeralshrahNo ratings yet
- Paper Millet Dunbar.d9355e2cDocument8 pagesPaper Millet Dunbar.d9355e2csantoso elektroNo ratings yet
- Sign Transition Modeling and A Scalable Solution To Continuous Sign Language Recognition For Real-World ApplicationsDocument23 pagesSign Transition Modeling and A Scalable Solution To Continuous Sign Language Recognition For Real-World Applicationsseebass srosrNo ratings yet
- UntitledDocument7 pagesUntitledAlexander CalimlimNo ratings yet
- Sign Language TranslationDocument23 pagesSign Language Translation陳子彤No ratings yet
- IBM MASTOR SYSTEM: Multilingual Automatic Speech-To-Speech TranslatorDocument4 pagesIBM MASTOR SYSTEM: Multilingual Automatic Speech-To-Speech TranslatorLhoskNo ratings yet
- Bi-Channel Sensor Fusion For Automatic Sign Language RecognitionDocument6 pagesBi-Channel Sensor Fusion For Automatic Sign Language RecognitionJulian MazoNo ratings yet
- Application of Template Matching Algorithm For Dynamic Gesture Recognition of American Sign Language Finger Spelling and Hand GestureDocument5 pagesApplication of Template Matching Algorithm For Dynamic Gesture Recognition of American Sign Language Finger Spelling and Hand GestureAsia Pacific Journal of Multidisciplinary ResearchNo ratings yet
- Recognizing Syntactic Errors in The Writing of Second Language LearnersDocument7 pagesRecognizing Syntactic Errors in The Writing of Second Language LearnersomaneramziNo ratings yet
- Recognition of On-Line Arabic Handwritten Characters Using Structural FeaturesDocument15 pagesRecognition of On-Line Arabic Handwritten Characters Using Structural FeaturesDiaa MustafaNo ratings yet
- Análisis Del Movimiento Facial Más Allá de Las Expresiones Emocionales - CompressedDocument21 pagesAnálisis Del Movimiento Facial Más Allá de Las Expresiones Emocionales - CompressedDAVID MARTINEZNo ratings yet
- Applied Sciences: Amharic OCR: An End-to-End LearningDocument13 pagesApplied Sciences: Amharic OCR: An End-to-End LearningLuck NabyiNo ratings yet
- Large Lexicon Detection of Sign LanguageDocument10 pagesLarge Lexicon Detection of Sign Languagelakshmi prasannaNo ratings yet
- American Sign Language (ASL) Recognition Based On HoughDocument14 pagesAmerican Sign Language (ASL) Recognition Based On HoughJuan Sebastian CifuentesNo ratings yet
- An Application Oriented Arabic Morphological AnalyzerDocument13 pagesAn Application Oriented Arabic Morphological AnalyzerLizaShanoianNo ratings yet
- Word Spotting in Gray Scale Handwritten Pashto Documents: Muhammad Ismail Shah Ching Y. SuenDocument6 pagesWord Spotting in Gray Scale Handwritten Pashto Documents: Muhammad Ismail Shah Ching Y. SuencthjgfytvfnoNo ratings yet
- Learning Rules and Categorization Networks For Language StandardizationDocument8 pagesLearning Rules and Categorization Networks For Language StandardizationGerhard Van HuyssteenNo ratings yet
- Survey On SL RecognitionDocument38 pagesSurvey On SL RecognitionKashif Aziz AwanNo ratings yet
- Modified Gabor Feature Extraction Method For Word Level Script Identification-Experimentation With Gurumukhi and English ScriptsDocument14 pagesModified Gabor Feature Extraction Method For Word Level Script Identification-Experimentation With Gurumukhi and English ScriptsSouhaila DjaffalNo ratings yet
- Research Paper On Sign Language InterpretingDocument6 pagesResearch Paper On Sign Language Interpretinggw1g9a3s100% (1)
- Fuzzy Model For Parameterized Sign Language-Sumaira Kausar-IJEACS-01-01Document9 pagesFuzzy Model For Parameterized Sign Language-Sumaira Kausar-IJEACS-01-01IJEACS UKNo ratings yet
- A Real-Time American Sign LanguageDocument7 pagesA Real-Time American Sign Language陳子彤No ratings yet
- The Coding and Annotation of Multimodal Dialogue Acts: Volha Petukhova and Harry BuntDocument8 pagesThe Coding and Annotation of Multimodal Dialogue Acts: Volha Petukhova and Harry BuntacouillaultNo ratings yet
- JFP PDFDocument66 pagesJFP PDFElizabeth Labrada DenizNo ratings yet
- Automated Lip Reading Technique For Password AuthenticationDocument7 pagesAutomated Lip Reading Technique For Password AuthenticationpejavzNo ratings yet
- Final Year Project ProposalDocument13 pagesFinal Year Project ProposalAdrian ZayasNo ratings yet
- Survey On Vector RepresentationsDocument46 pagesSurvey On Vector RepresentationsLuis JesusNo ratings yet
- Gebreegziabher 2020Document5 pagesGebreegziabher 2020JaniNo ratings yet
- An Omnifont Open-Vocabulary OCR System For English and ArabicDocument10 pagesAn Omnifont Open-Vocabulary OCR System For English and ArabicSamy Khalil AbushanabNo ratings yet
- Video Audio Interface For Recognizing Gestures of Indian Sign LanguageDocument25 pagesVideo Audio Interface For Recognizing Gestures of Indian Sign LanguageNisha Kotyan G RNo ratings yet
- Context-Fixing Semantics For Instructable Robots: J. Man-Machine StudiesDocument30 pagesContext-Fixing Semantics For Instructable Robots: J. Man-Machine StudiesMiguel ArzamendiaNo ratings yet
- Ai Unit 5Document16 pagesAi Unit 5Mukeshram.B AIDS20No ratings yet
- 1508 01346 PDFDocument16 pages1508 01346 PDFhemantNo ratings yet
- Semantic Maps and Word Formation - Agents, Instruments, and Related Semantic RolesDocument14 pagesSemantic Maps and Word Formation - Agents, Instruments, and Related Semantic RolesAbdallah ShdaifatNo ratings yet
- Rec Pa MiDocument14 pagesRec Pa MiAnand MishraNo ratings yet
- Speech Recognition With Flat Direct ModelsDocument13 pagesSpeech Recognition With Flat Direct Modelssathish14singhNo ratings yet
- A Comparative Study of Two State-Of-The-Art Sequence Processing Techniques For Hand Gesture RecognirtionDocument12 pagesA Comparative Study of Two State-Of-The-Art Sequence Processing Techniques For Hand Gesture RecognirtionSurbhi PrasadNo ratings yet
- Comparing and Combining Semantic Verb ClassificationsDocument34 pagesComparing and Combining Semantic Verb ClassificationsDiniNo ratings yet
- Database Semantics For Natural Language: Roland HausserDocument48 pagesDatabase Semantics For Natural Language: Roland Haussermanskebe6121No ratings yet
- Top-Down and Bottom-Up Cues For Scene Text Recognition: Anand Mishra Karteek Alahari C. V. JawaharDocument8 pagesTop-Down and Bottom-Up Cues For Scene Text Recognition: Anand Mishra Karteek Alahari C. V. JawaharVamsinath JavangulaNo ratings yet
- Verb Types and Semantic Maps: Marloes Oomen (ACLC, University of Amsterdam) M.oomen2@uva - NLDocument16 pagesVerb Types and Semantic Maps: Marloes Oomen (ACLC, University of Amsterdam) M.oomen2@uva - NLBahmano BahmanoNo ratings yet
- Verb Types and Semantic Maps: Marloes Oomen (ACLC, University of Amsterdam) M.oomen2@uva - NLDocument16 pagesVerb Types and Semantic Maps: Marloes Oomen (ACLC, University of Amsterdam) M.oomen2@uva - NLBahmano BahmanoNo ratings yet
- Apjmr 2014 2 114 PDFDocument5 pagesApjmr 2014 2 114 PDFKelly De Leon TuliaoNo ratings yet
- Arabic Diacritization Using Bidirectional Long ShoDocument13 pagesArabic Diacritization Using Bidirectional Long ShoMaria NutuNo ratings yet
- Research Article: An Application of Classifier Combination Methods in Hand Gesture RecognitionDocument18 pagesResearch Article: An Application of Classifier Combination Methods in Hand Gesture RecognitionRoorroo GabrummàaNo ratings yet
- Paper 8-Segment, Track, Extract, Recognize and Convert Sign Language Videos To VoiceTextDocument13 pagesPaper 8-Segment, Track, Extract, Recognize and Convert Sign Language Videos To VoiceTextEditor IJACSANo ratings yet
- 2001 Data Driven ApproachDocument6 pages2001 Data Driven ApproachSusanta SarangiNo ratings yet
- ASL Tutor Final 2ndDocument6 pagesASL Tutor Final 2ndPriyeshGhoshNo ratings yet
- Aula Ling 12Document6 pagesAula Ling 12Oliver DumaskNo ratings yet
- A Comparative Study of Feature Selection MethodsDocument9 pagesA Comparative Study of Feature Selection MethodsDarrenNo ratings yet
- The Ability of Word Embeddings To Capture Word SimilaritiesDocument18 pagesThe Ability of Word Embeddings To Capture Word SimilaritiesDarrenNo ratings yet
- Speech Technology and Research Laboratory, SRI International, Menlo Park, CA, USADocument5 pagesSpeech Technology and Research Laboratory, SRI International, Menlo Park, CA, USAAishwarya VasudevenNo ratings yet
- Handwritten Devanagari Word Recognition: A Curvelet Transform Based ApproachDocument8 pagesHandwritten Devanagari Word Recognition: A Curvelet Transform Based ApproachAratiKothariNo ratings yet
- 1 Thornhill&HorchPlantWideDisturbanceCEP2007 PDFDocument11 pages1 Thornhill&HorchPlantWideDisturbanceCEP2007 PDFRam NiceNo ratings yet
- SimplificationDocument2 pagesSimplificationRam NiceNo ratings yet
- GK Questions Asked SSC CGL Tier 1: 2016Document10 pagesGK Questions Asked SSC CGL Tier 1: 2016Ram NiceNo ratings yet
- Mechanical MeasurementsDocument8 pagesMechanical MeasurementsRam NiceNo ratings yet
- TutorialsDocument12 pagesTutorialsRam NiceNo ratings yet
- Freqency DomainDocument2 pagesFreqency DomainRam NiceNo ratings yet
- Feedback Control SystemDocument11 pagesFeedback Control SystemRam Nice100% (2)
- Maya Deren PaperDocument9 pagesMaya Deren PaperquietinstrumentalsNo ratings yet
- EMD Question Bank II 2Document4 pagesEMD Question Bank II 2Soham MisalNo ratings yet
- Project Quality Plan (JFJS-788)Document18 pagesProject Quality Plan (JFJS-788)mominNo ratings yet
- Financial Market - Bsa 2A Dr. Ben E. Bunyi: Imus Institute of Science and TechnologyDocument3 pagesFinancial Market - Bsa 2A Dr. Ben E. Bunyi: Imus Institute of Science and TechnologyAsh imoNo ratings yet
- How Chargers WorkDocument21 pagesHow Chargers WorkMuhammad Irfan RiazNo ratings yet
- Song Book Inner PagesDocument140 pagesSong Book Inner PagesEliazer PetsonNo ratings yet
- 220245-MSBTE-22412-Java (Unit 1)Document40 pages220245-MSBTE-22412-Java (Unit 1)Nomaan ShaikhNo ratings yet
- Design of Reinforced Cement Concrete ElementsDocument14 pagesDesign of Reinforced Cement Concrete ElementsSudeesh M SNo ratings yet
- CATaclysm Preview ReleaseDocument52 pagesCATaclysm Preview ReleaseGhaderalNo ratings yet
- Ultracold Atoms SlidesDocument49 pagesUltracold Atoms SlideslaubbaumNo ratings yet
- Instant Download Business in Action 7Th Edition Bovee Solutions Manual PDF ScribdDocument17 pagesInstant Download Business in Action 7Th Edition Bovee Solutions Manual PDF ScribdLance CorreaNo ratings yet
- Leadership and Management in Different Arts FieldsDocument10 pagesLeadership and Management in Different Arts Fieldsjay jayNo ratings yet
- Crypto Wall Crypto Snipershot OB Strategy - Day Trade SwingDocument29 pagesCrypto Wall Crypto Snipershot OB Strategy - Day Trade SwingArete JinseiNo ratings yet
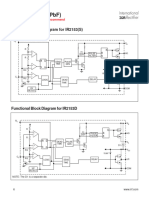
- IR2153 Parte6Document1 pageIR2153 Parte6FRANK NIELE DE OLIVEIRANo ratings yet
- Mushroom Project - Part 1Document53 pagesMushroom Project - Part 1Seshadev PandaNo ratings yet
- Loctite 586 PDFDocument9 pagesLoctite 586 PDForihimieNo ratings yet
- Yale Revision WorksheetDocument3 pagesYale Revision WorksheetYASHI AGRAWALNo ratings yet
- CHAPTER IV The PSYCHOLOGY of YOGA Yoga, One Among The Six Orthodox Schools of Indian ... (PDFDrive)Document64 pagesCHAPTER IV The PSYCHOLOGY of YOGA Yoga, One Among The Six Orthodox Schools of Indian ... (PDFDrive)kriti madhokNo ratings yet
- Derivational and Inflectional Morpheme in English LanguageDocument11 pagesDerivational and Inflectional Morpheme in English LanguageEdificator BroNo ratings yet
- Bcom (HNRS) Project Final Year University of Calcutta (2018)Document50 pagesBcom (HNRS) Project Final Year University of Calcutta (2018)Balaji100% (1)
- VRPIN 01843 PsychiatricReportDrivers 1112 WEBDocument2 pagesVRPIN 01843 PsychiatricReportDrivers 1112 WEBeverlord123No ratings yet
- Perdarahan Uterus AbnormalDocument15 pagesPerdarahan Uterus Abnormalarfiah100% (1)
- CH-5 Further Percentages AnswersDocument5 pagesCH-5 Further Percentages AnswersMaram MohanNo ratings yet
- 4th Sept - Marathon Series Lecture 8 - General AwarenessDocument208 pages4th Sept - Marathon Series Lecture 8 - General AwarenessManbir ArinNo ratings yet
- 11.3.1 Some Special CasesDocument10 pages11.3.1 Some Special CasesSiddharth KishanNo ratings yet
- Application of The Strain Energy To Estimate The Rock Load in Non-Squeezing Ground ConditionDocument17 pagesApplication of The Strain Energy To Estimate The Rock Load in Non-Squeezing Ground ConditionAmit Kumar GautamNo ratings yet