You might also like
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5795)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1091)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (895)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (588)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (345)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (121)
- Cheng - Field and Wave Electromagnetics 2ed Solution ManualDocument136 pagesCheng - Field and Wave Electromagnetics 2ed Solution ManualQasim Ijaz Ahmed90% (147)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (400)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- 2003 A Comprehensive Three-Dimensional Model of The CochleaDocument22 pages2003 A Comprehensive Three-Dimensional Model of The Cochleaphsieh007No ratings yet
- An Introduction of Scientific ComputingDocument22 pagesAn Introduction of Scientific Computingphsieh007No ratings yet
- Bend It Like Zhang Jike Spin in Table TennisDocument5 pagesBend It Like Zhang Jike Spin in Table Tennisphsieh007No ratings yet
- AcerMonitor 1.0 Eng P206HDocument23 pagesAcerMonitor 1.0 Eng P206Hphsieh007No ratings yet
- Matlab ParallelDocument617 pagesMatlab Parallelphsieh007No ratings yet
- Part I: Theoretical Assignments: Homework Assignment 5Document2 pagesPart I: Theoretical Assignments: Homework Assignment 5phsieh007No ratings yet
- Unit 6 Electrotonic Potential of The NeuronDocument9 pagesUnit 6 Electrotonic Potential of The Neuronphsieh007No ratings yet
- 6 Training PlanDocument9 pages6 Training PlanDinesh Kanukollu100% (1)
- Latin American Vocabulary BookDocument1 pageLatin American Vocabulary BookWilma AnugrahNo ratings yet
- Final - Urban and Transportation Engineering - PPT Group 1Document19 pagesFinal - Urban and Transportation Engineering - PPT Group 1JayChristian QuimsonNo ratings yet
- Masculine Scents SpicyDocument2 pagesMasculine Scents SpicyGabrielle May LacsamanaNo ratings yet
- Lyphochek Assayed Chemistry Control Levels 1 and 2Document4 pagesLyphochek Assayed Chemistry Control Levels 1 and 2Gaurav MauryaNo ratings yet
- People in OrganisationsDocument8 pagesPeople in OrganisationsBritney valladares100% (1)
- PEDOSPHEREDocument32 pagesPEDOSPHEREKENT YNo ratings yet
- Learning Intervention Program (Lip) Plan Second Quarter SY 2020 - 2021Document3 pagesLearning Intervention Program (Lip) Plan Second Quarter SY 2020 - 2021Laarni Kiamco Ortiz EpanNo ratings yet
- Summary of Cutting Data For Plain Surface: DegrosareDocument4 pagesSummary of Cutting Data For Plain Surface: DegrosareAndrei MihaiNo ratings yet
- Olper's Brand AuditDocument60 pagesOlper's Brand AuditUsama NaseemNo ratings yet
- GX200 Operator Service ManualDocument12 pagesGX200 Operator Service ManualKenia Fdez AlvaradoNo ratings yet
- Disease and IllnessDocument3 pagesDisease and IllnessAntonius Robby100% (1)
- Same Engines Spare PartsDocument98 pagesSame Engines Spare PartsAdrian Macaya100% (1)
- Annual Examination Class Xi Chemistry (2020-2021) SubjectiveDocument3 pagesAnnual Examination Class Xi Chemistry (2020-2021) SubjectiveLavyaNo ratings yet
- Mind Body Relationship in PsychotherapyDocument8 pagesMind Body Relationship in Psychotherapymoyosore100% (1)
- ZR Handbook Rev2 PDFDocument80 pagesZR Handbook Rev2 PDFmyungkwan haNo ratings yet
- Heat PresentationDocument60 pagesHeat PresentationashokNo ratings yet
- The Go-Giver InitiativeDocument8 pagesThe Go-Giver InitiativesafirakingNo ratings yet
- 13 08 21NewsRecordDocument10 pages13 08 21NewsRecordKristina HicksNo ratings yet
- Chemical Bonding Assignment 2 AnswersDocument5 pagesChemical Bonding Assignment 2 AnswersdarylchenNo ratings yet
- (D E Watt) Quantities For Generalized Dosimetry of (BookFi)Document388 pages(D E Watt) Quantities For Generalized Dosimetry of (BookFi)Νικος ΜατσαφλοκοςNo ratings yet
- History Checklist - Sara AlJasserDocument3 pagesHistory Checklist - Sara AlJassersalman khanNo ratings yet
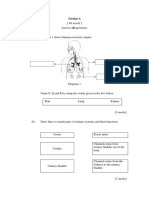
- Section A: Jawab Semua SoalanDocument3 pagesSection A: Jawab Semua SoalanAzreen IzetNo ratings yet
- Quarterly Test - Q3 English 9Document6 pagesQuarterly Test - Q3 English 9Rodrigl BaiganNo ratings yet
- Crew Handbook v36 190809 PDFDocument311 pagesCrew Handbook v36 190809 PDFIanA100% (3)
- On The Charge of Rape: Under Article 266-A of The RPC, Rape IsDocument3 pagesOn The Charge of Rape: Under Article 266-A of The RPC, Rape IsTricia SandovalNo ratings yet
- Central University of Rajasthan: Department of Social WorkDocument4 pagesCentral University of Rajasthan: Department of Social WorkShravan RajNo ratings yet
- Effect of Holy Water On The Growth of Radish PlantsDocument2 pagesEffect of Holy Water On The Growth of Radish PlantsmiaNo ratings yet
- Epsom Salt ClassDocument7 pagesEpsom Salt ClassSofia marisa fernandesNo ratings yet
- Road To Sustainable SHG-Bank Linkage Programme: Formulating Strategies For Managing Credit Risk With Respect To Rural BengalDocument6 pagesRoad To Sustainable SHG-Bank Linkage Programme: Formulating Strategies For Managing Credit Risk With Respect To Rural BengalAnimesh TiwariNo ratings yet