You might also like
- Uc 1825Document17 pagesUc 1825RacielMCNo ratings yet
- LCD Display VID29 - Manual - EN-080606Document10 pagesLCD Display VID29 - Manual - EN-080606RacielMCNo ratings yet
- Piksi Datasheet v2.3.1Document4 pagesPiksi Datasheet v2.3.1RacielMCNo ratings yet
- A 3-kW Unity-Power-Factor Rectifier Based PDFDocument9 pagesA 3-kW Unity-Power-Factor Rectifier Based PDFRacielMCNo ratings yet
- IRF640Document10 pagesIRF640Halil DurmuşNo ratings yet
- IELTS Official Tips For Reading ExamDocument8 pagesIELTS Official Tips For Reading ExamCristina StanNo ratings yet
- 07 Continuous HM IDocument102 pages07 Continuous HM IRacielMCNo ratings yet
- Continental Device India LimitedDocument5 pagesContinental Device India LimitedRacielMCNo ratings yet
- 08 Continuous Cool LightsDocument29 pages08 Continuous Cool LightsRacielMCNo ratings yet
- 02 DesistiDocument38 pages02 DesistiRacielMCNo ratings yet
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (895)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (588)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (400)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (345)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (121)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- Abbreviationsusedin AMMDocument36 pagesAbbreviationsusedin AMMShailesh KadamNo ratings yet
- Index: All Part No. & Names Are Used For Cross Referance Purpose OnlyDocument76 pagesIndex: All Part No. & Names Are Used For Cross Referance Purpose Onlynaveen deshwalNo ratings yet
- Allen Bradley Catalog Wiring SystemsDocument189 pagesAllen Bradley Catalog Wiring SystemsAlphaNo ratings yet
- History of ComputerDocument5 pagesHistory of ComputerGlad RoblesNo ratings yet
- RM903 Rev01-EN UPSTools EN PDFDocument38 pagesRM903 Rev01-EN UPSTools EN PDFardi lexNo ratings yet
- Service Manual For Dynalift Vector Ii: KonecranesDocument24 pagesService Manual For Dynalift Vector Ii: KonecranesDante Williams50% (4)
- ASPECTDocument72 pagesASPECTAlberto ReyesNo ratings yet
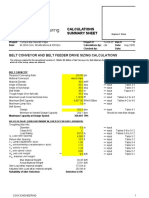
- Belt Conveyors With Shaft SizingDocument5 pagesBelt Conveyors With Shaft SizingRakhi Mor100% (2)
- Spek Teknis AFKUPengadaan Peralatan Kantor Bidang 1 Batch 1revDocument10 pagesSpek Teknis AFKUPengadaan Peralatan Kantor Bidang 1 Batch 1revArtha Arjuna MandiriNo ratings yet
- Test Manual 2657766024 - 000Document66 pagesTest Manual 2657766024 - 000nabil sellamiNo ratings yet
- ALU DesignDocument5 pagesALU DesignasdNo ratings yet
- Instruction Manual AK-157Document10 pagesInstruction Manual AK-157Kalim KamNo ratings yet
- LED Series ResistanceDocument10 pagesLED Series ResistanceKramyer Rabanillo100% (1)
- Avm 30 3306Document6 pagesAvm 30 3306PanochonNo ratings yet
- Silicon NPN Power Transistors: Savantic Semiconductor Product SpecificationDocument3 pagesSilicon NPN Power Transistors: Savantic Semiconductor Product SpecificationSsr ShaNo ratings yet
- Yaskawa SGDB ManualDocument652 pagesYaskawa SGDB ManualMichael KennaNo ratings yet
- How To Detect Insulation Failures in Electrical EquipmentDocument7 pagesHow To Detect Insulation Failures in Electrical EquipmentchandruuncleNo ratings yet
- Upmo, Ovcpd Uplb: The Electrical Services SectionDocument24 pagesUpmo, Ovcpd Uplb: The Electrical Services SectionMickiee OracionNo ratings yet
- Module 17 QuestionDocument3 pagesModule 17 QuestionUttamNo ratings yet
- Siemens Optipoint Manual Accessories MultilanguagesDocument177 pagesSiemens Optipoint Manual Accessories MultilanguagesHaefelin ArnaudNo ratings yet
- XBee Arduino Compatible Coding PlatformDocument1 pageXBee Arduino Compatible Coding Platformgece25No ratings yet
- 24lc21 KullanimiDocument8 pages24lc21 KullanimiskiziltoprakNo ratings yet
- Motoniveladora 140KDocument2 pagesMotoniveladora 140KAbraão Silva100% (5)
- Power Transmission BeltsDocument54 pagesPower Transmission Beltsgamini ranaweeraNo ratings yet
- Defence Engine: 261-336 KW (350-450 HP) 1491-1850 NM (1100-1364 LB-FT)Document2 pagesDefence Engine: 261-336 KW (350-450 HP) 1491-1850 NM (1100-1364 LB-FT)Aamir ArainNo ratings yet
- Agilent AEDS-962x For 300 LPI Ultra Small Optical Encoder ModulesDocument11 pagesAgilent AEDS-962x For 300 LPI Ultra Small Optical Encoder ModulesLucio UbelluNo ratings yet
- 6MF28320AA00 Datasheet enDocument2 pages6MF28320AA00 Datasheet enLeandro PlácidoNo ratings yet
- Analog MeterDocument31 pagesAnalog MeterAnooshe Asadian100% (1)
- Checkball Domestic Volume 1atsgDocument120 pagesCheckball Domestic Volume 1atsgJorge GallardoNo ratings yet
- FADZXcv SXDocument1 pageFADZXcv SXMohamed SelimNo ratings yet