You might also like
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (121)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (588)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (400)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (345)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (895)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- Space Hulk - WDDocument262 pagesSpace Hulk - WDIgor Baranenko100% (1)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Leak Detection ReportDocument29 pagesLeak Detection ReportAnnMarie KathleenNo ratings yet
- Methods of Recording Retruded Contact Position in Dentate PatientsDocument15 pagesMethods of Recording Retruded Contact Position in Dentate PatientsYossr MokhtarNo ratings yet
- TIMO Final 2020-2021 P3Document5 pagesTIMO Final 2020-2021 P3An Nguyen100% (2)
- of Thesis ProjectDocument2 pagesof Thesis ProjectmoonNo ratings yet
- Signature RedactedDocument175 pagesSignature RedactedAmália EirezNo ratings yet
- MotorsDocument116 pagesMotorsAmália EirezNo ratings yet
- Research Article: One-Dimensional Constitutive Model of Shape Memory Alloy With An Empirical Kinetics EquationDocument15 pagesResearch Article: One-Dimensional Constitutive Model of Shape Memory Alloy With An Empirical Kinetics EquationAmália EirezNo ratings yet
- Static Keyword in Java - JavatpointDocument7 pagesStatic Keyword in Java - JavatpointAmália EirezNo ratings yet
- # Weapons EXP TableDocument9 pages# Weapons EXP TableAmália EirezNo ratings yet
- Final Keyword in Java - Javatpoint PDFDocument5 pagesFinal Keyword in Java - Javatpoint PDFAmália EirezNo ratings yet
- CIRP Annals - Manufacturing Technology: X. Cheng, K. Nakamoto, M. Sugai, S. Matsumoto, Z.G. Wang, K. YamazakiDocument6 pagesCIRP Annals - Manufacturing Technology: X. Cheng, K. Nakamoto, M. Sugai, S. Matsumoto, Z.G. Wang, K. YamazakiAmália EirezNo ratings yet
- BaltaDocument18 pagesBaltaAmália EirezNo ratings yet
- WankelDocument42 pagesWankelAmália EirezNo ratings yet
- PSG College of Technology, Coimbatore - 641 004 Semester Examinations, SemesterDocument3 pagesPSG College of Technology, Coimbatore - 641 004 Semester Examinations, SemesterBabitha DhanaNo ratings yet
- Agco Serie 800 PDFDocument24 pagesAgco Serie 800 PDFJohnny VargasNo ratings yet
- Oracle Forms & Reports 12.2.1.2.0 - Create and Configure On The OEL 7Document50 pagesOracle Forms & Reports 12.2.1.2.0 - Create and Configure On The OEL 7Mario Vilchis Esquivel100% (1)
- Decision Making and The Role of Manageme PDFDocument20 pagesDecision Making and The Role of Manageme PDFRaadmaan RadNo ratings yet
- The Doshas in A Nutshell - : Vata Pitta KaphaDocument1 pageThe Doshas in A Nutshell - : Vata Pitta KaphaCheryl LynnNo ratings yet
- Outdoor Air Pollution: Sources, Health Effects and SolutionsDocument20 pagesOutdoor Air Pollution: Sources, Health Effects and SolutionsCamelia RadulescuNo ratings yet
- LTE Networks Engineering Track Syllabus Overview - 23 - 24Document4 pagesLTE Networks Engineering Track Syllabus Overview - 23 - 24Mohamed SamiNo ratings yet
- DarcDocument9 pagesDarcJunior BermudezNo ratings yet
- DP 2 Human IngenuityDocument8 pagesDP 2 Human Ingenuityamacodoudiouf02No ratings yet
- Report Card Grade 1 2Document3 pagesReport Card Grade 1 2Mely DelacruzNo ratings yet
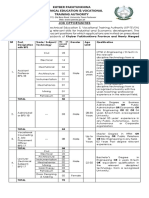
- KP Tevta Advertisement 16-09-2019Document4 pagesKP Tevta Advertisement 16-09-2019Ishaq AminNo ratings yet
- Linguistics Is Descriptive, Not Prescriptive.: Prescriptive Grammar. Prescriptive Rules Tell You HowDocument2 pagesLinguistics Is Descriptive, Not Prescriptive.: Prescriptive Grammar. Prescriptive Rules Tell You HowMonette Rivera Villanueva100% (1)
- Ob NotesDocument8 pagesOb NotesRahul RajputNo ratings yet
- 18 June 2020 12:03: New Section 1 Page 1Document4 pages18 June 2020 12:03: New Section 1 Page 1KarthikNayakaNo ratings yet
- MASONRYDocument8 pagesMASONRYJowelyn MaderalNo ratings yet
- Floating Oil Skimmer Design Using Rotary Disc MethDocument9 pagesFloating Oil Skimmer Design Using Rotary Disc MethAhmad YaniNo ratings yet
- B122 - Tma03Document7 pagesB122 - Tma03Martin SantambrogioNo ratings yet
- A Case Study Puga Geothermal System,: OF IndiaDocument7 pagesA Case Study Puga Geothermal System,: OF IndiaPERIKALA TARUNNo ratings yet
- Marketing FinalDocument15 pagesMarketing FinalveronicaNo ratings yet
- Aleksandrov I Dis 1-50.ru - enDocument50 pagesAleksandrov I Dis 1-50.ru - enNabeel AdilNo ratings yet
- Arnold Ventures Letter To Congressional Social Determinants of Health CaucusDocument7 pagesArnold Ventures Letter To Congressional Social Determinants of Health CaucusArnold VenturesNo ratings yet
- WL-80 FTCDocument5 pagesWL-80 FTCMr.Thawatchai hansuwanNo ratings yet
- Agnes de MilleDocument3 pagesAgnes de MilleMarie-Maxence De RouckNo ratings yet
- On Derridean Différance - UsiefDocument16 pagesOn Derridean Différance - UsiefS JEROME 2070505No ratings yet
- SMR 13 Math 201 SyllabusDocument2 pagesSMR 13 Math 201 SyllabusFurkan ErisNo ratings yet