You might also like
- Financial ThinkingDocument7 pagesFinancial ThinkingWEMERSON31No ratings yet
- A Guide To Casino Mathematics: Robert C. Hannum University of DenverDocument12 pagesA Guide To Casino Mathematics: Robert C. Hannum University of DenverNaveen Ramaswamy100% (3)
- Cloaking' Device Uses Ordinary Lenses To Hide Objects Across Range of Angles - NewsCenterDocument4 pagesCloaking' Device Uses Ordinary Lenses To Hide Objects Across Range of Angles - NewsCenterWEMERSON31No ratings yet
- Accurate Estimator of Correlations Between Asynchronous SignalsDocument14 pagesAccurate Estimator of Correlations Between Asynchronous SignalsWEMERSON31No ratings yet
- A Simple Model of Price FormationDocument4 pagesA Simple Model of Price FormationWEMERSON31No ratings yet
- Very Fast BDSDocument95 pagesVery Fast BDSWEMERSON31No ratings yet
- Advice To A Young Researcher PDFDocument29 pagesAdvice To A Young Researcher PDFWEMERSON31No ratings yet
- RDataMining Reference CardDocument5 pagesRDataMining Reference CardWEMERSON31No ratings yet
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (400)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (895)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (588)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (73)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (121)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- TOPIC: Movable and Immovable Property Under Section-3 of Transfer of Property ActDocument10 pagesTOPIC: Movable and Immovable Property Under Section-3 of Transfer of Property ActRishAbh DaidNo ratings yet
- Describe an English lesson you enjoyed.: 多叔逻辑口语,中国雅思口语第一品牌 公共微信: ddielts 新浪微博@雅思钱多多Document7 pagesDescribe an English lesson you enjoyed.: 多叔逻辑口语,中国雅思口语第一品牌 公共微信: ddielts 新浪微博@雅思钱多多Siyeon YeungNo ratings yet
- Answer:: Exercise-IDocument15 pagesAnswer:: Exercise-IAishika NagNo ratings yet
- FoundationDocument98 pagesFoundationManognya KotaNo ratings yet
- ZH210LC 5BDocument24 pagesZH210LC 5BPHÁT NGUYỄN THẾ0% (1)
- Warning: Shaded Answers Without Corresponding Solution Will Incur Deductive PointsDocument1 pageWarning: Shaded Answers Without Corresponding Solution Will Incur Deductive PointsKhiara Claudine EspinosaNo ratings yet
- Online Dynamic Security Assessment of Wind Integrated Power System UsingDocument9 pagesOnline Dynamic Security Assessment of Wind Integrated Power System UsingRizwan Ul HassanNo ratings yet
- 13 SK Kader Pendamping PGSDocument61 pages13 SK Kader Pendamping PGSrachman ramadhanaNo ratings yet
- Lecture 11 - Performance AppraisalsDocument23 pagesLecture 11 - Performance AppraisalsCard CardNo ratings yet
- Disney - QMDocument14 pagesDisney - QMSyarifuddin Zulkifli0% (1)
- Yz125 2005Document58 pagesYz125 2005Ignacio Sanchez100% (1)
- History Homework Help Ks3Document8 pagesHistory Homework Help Ks3afetnjvog100% (1)
- 2022 Summer Question Paper (Msbte Study Resources)Document4 pages2022 Summer Question Paper (Msbte Study Resources)Ganesh GopalNo ratings yet
- Distillation Column DesignDocument42 pagesDistillation Column DesignAakanksha Raul100% (1)
- ER288 090714 5082 CV OKP (089) Method Statement For Plate Baring TestDocument3 pagesER288 090714 5082 CV OKP (089) Method Statement For Plate Baring TestWr ArNo ratings yet
- Selecting Appropriate Instructional Materials For Edukasyong Pantahanan at Pangkabuhayan/ Technology and Livelihood EducationDocument35 pagesSelecting Appropriate Instructional Materials For Edukasyong Pantahanan at Pangkabuhayan/ Technology and Livelihood EducationJhenn Mhen Yhon100% (1)
- 37270a QUERCUS GBDocument6 pages37270a QUERCUS GBMocanu Romeo-CristianNo ratings yet
- Sap EwmDocument2 pagesSap EwmsirivirishiNo ratings yet
- The Adoption of e Procurement in Tanzani PDFDocument5 pagesThe Adoption of e Procurement in Tanzani PDFDangyi GodSeesNo ratings yet
- Dady - Piernas LargasDocument12 pagesDady - Piernas LargasSarha NietoNo ratings yet
- ECON 401/601, Microeconomic Theory 3/micro 1: Jean Guillaume Forand Fall 2019, WaterlooDocument3 pagesECON 401/601, Microeconomic Theory 3/micro 1: Jean Guillaume Forand Fall 2019, WaterlooTarun SharmaNo ratings yet
- 9300AE 10-30kseis LDN 2005 PDFDocument2 pages9300AE 10-30kseis LDN 2005 PDFDoina ClichiciNo ratings yet
- Practical Research 2.9Document22 pagesPractical Research 2.9Michael GabertanNo ratings yet
- Motive 27Tmx: Data SheetDocument2 pagesMotive 27Tmx: Data SheetUlisesGómezNo ratings yet
- 【SIEMENS】Cios Spin-FlyerDocument8 pages【SIEMENS】Cios Spin-FlyerAshleyNo ratings yet
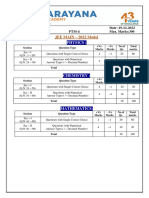
- Xii - STD - Iit - B1 - QP (19-12-2022) - 221221 - 102558Document13 pagesXii - STD - Iit - B1 - QP (19-12-2022) - 221221 - 102558Stephen SatwikNo ratings yet
- TOA Project Presentation (GROUP 5)Document22 pagesTOA Project Presentation (GROUP 5)Khadija ShahidNo ratings yet
- A Guide To Sample Size For Animal-Based Studies (VetBooks - Ir)Document292 pagesA Guide To Sample Size For Animal-Based Studies (VetBooks - Ir)Jonathan MannNo ratings yet
- Slip Ring Motor CheckDocument3 pagesSlip Ring Motor CheckRolando LoayzaNo ratings yet
- EE360 - Magnetic CircuitsDocument48 pagesEE360 - Magnetic Circuitsبدون اسمNo ratings yet