You might also like
- Gears Design MD2Document52 pagesGears Design MD2Faizan MohyuddinNo ratings yet
- Unit I&II Gear DesignDocument130 pagesUnit I&II Gear DesignVishal JaiswalNo ratings yet
- Inversions of Double Slider Crank ChainDocument23 pagesInversions of Double Slider Crank ChainAnkit JadhavNo ratings yet
- Catia Tutorial WormDocument6 pagesCatia Tutorial Wormmehmedovic33% (3)
- Mechanical Principles - Assignment 3Document9 pagesMechanical Principles - Assignment 3Steven GoddardNo ratings yet
- 44-Slider Crank Mechanism Using HacksawDocument15 pages44-Slider Crank Mechanism Using HacksawsathishNo ratings yet
- Machine Design Unit 1 Design PhilosophyDocument12 pagesMachine Design Unit 1 Design PhilosophyAnand Babu100% (3)
- Machine Design IIDocument23 pagesMachine Design IIBinar Arum OktaviaNo ratings yet
- Design of Helical GearsDocument10 pagesDesign of Helical GearsKarthik SNo ratings yet
- DOM MCQsDocument9 pagesDOM MCQsyuvraj PrajapatiNo ratings yet
- Bevel Gear Design Project MainDocument66 pagesBevel Gear Design Project MainJACKPOT LY100% (2)
- CH 19Document21 pagesCH 19Sanjay Kumar100% (1)
- Chapter 3-BreakDocument37 pagesChapter 3-Breakkibromgidey12No ratings yet
- Clutches and BrakesDocument77 pagesClutches and BrakesVenu Gopal100% (1)
- DAutonomous Toggle Scissor JackDocument19 pagesDAutonomous Toggle Scissor JackAsad Ali100% (1)
- VHJJJKDocument17 pagesVHJJJKKhanna Dhinesh100% (1)
- ME374 Module 2Document57 pagesME374 Module 2Christian Breth BurgosNo ratings yet
- Belt and Drive Analysis of Flour MillDocument16 pagesBelt and Drive Analysis of Flour Milllikhith saiNo ratings yet
- Active Suspension System With Preview ControlDocument5 pagesActive Suspension System With Preview Controlrudey18No ratings yet
- 604 I.c.engine (Me-604) Exp. ManualDocument35 pages604 I.c.engine (Me-604) Exp. Manualnavaneet gupta100% (1)
- Mechatronics Unit III and IV Question and AnswersDocument6 pagesMechatronics Unit III and IV Question and AnswersSaravanan MathiNo ratings yet
- Lecture 1Document41 pagesLecture 1norhaslina_aa33% (3)
- MMMDocument34 pagesMMMVaibhav Vithoba NaikNo ratings yet
- Gear Box DesignDocument74 pagesGear Box DesignRanjib BiswasNo ratings yet
- A1. Examples: Belt Drives Examples and WorksheetDocument3 pagesA1. Examples: Belt Drives Examples and WorksheetAb_AlizadehNo ratings yet
- Involute Spur Gear ProblemsDocument6 pagesInvolute Spur Gear ProblemsChiragJansari100% (1)
- Mech-Vi-Design of Machine Elements II (10me62) - Question PaperDocument11 pagesMech-Vi-Design of Machine Elements II (10me62) - Question PaperAnonymous utfuIcnNo ratings yet
- Design of Transmission Systems - Department of Mechanical EngineeringDocument10 pagesDesign of Transmission Systems - Department of Mechanical EngineeringDesejo SozinandoNo ratings yet
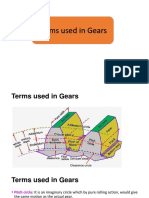
- Gears TerminologyDocument10 pagesGears TerminologyJawad Ullah100% (2)
- Mechanics Tutorial - ClutchesDocument0 pagesMechanics Tutorial - ClutchesBen JohnsonNo ratings yet
- Kinematics and Dynamics of Machinery Lab ManualDocument63 pagesKinematics and Dynamics of Machinery Lab ManualsaranNo ratings yet
- D-Alembert Principle and Lagrange's EquationsDocument9 pagesD-Alembert Principle and Lagrange's EquationsShakeel Ahmad KasuriNo ratings yet
- Master PPT DesignDocument15 pagesMaster PPT DesignUsama Epn Abdelmksoud AhmedNo ratings yet
- Metrology Solved ExamplesDocument17 pagesMetrology Solved Examplesjoin2ravikantNo ratings yet
- Notes-1 (Turbomachines)Document24 pagesNotes-1 (Turbomachines)VIRAJ HADKARNo ratings yet
- Gear Trains - Lecture 10Document22 pagesGear Trains - Lecture 10priyankar007No ratings yet
- Conjugate Tooth-1-2 PDFDocument8 pagesConjugate Tooth-1-2 PDFHarshavardhan Kutal100% (1)
- Gearbox Design Project ReportDocument2 pagesGearbox Design Project ReportAnonymous dWtqWj4qjNo ratings yet
- DTS - NotesDocument75 pagesDTS - NotesS A ABDUL SUKKURNo ratings yet
- Slider Crank Power Hammer Mechanism Project ReportDocument33 pagesSlider Crank Power Hammer Mechanism Project ReportYemmina Madhusudhan80% (15)
- Literature SurveyDocument6 pagesLiterature SurveytalhaNo ratings yet
- Kinematics of Machinery NotesDocument65 pagesKinematics of Machinery NotesVenkatesh Rajamani100% (1)
- Drum Brake CalculationDocument3 pagesDrum Brake CalculationKarthigaiselvan Shanmuganathan100% (1)
- Design of ShaftsDocument2 pagesDesign of ShaftsÖzgür AtaseverNo ratings yet
- Maintenance of Machinery Course Code: Mceng 5142 Instructor: Mesfin S. (PH.D.)Document30 pagesMaintenance of Machinery Course Code: Mceng 5142 Instructor: Mesfin S. (PH.D.)Mikias Tefera100% (1)
- Thermodynamics TableDocument82 pagesThermodynamics TableZenin EasaNo ratings yet
- Chapter14 Solutions 11eDocument43 pagesChapter14 Solutions 11e종운No ratings yet
- Elements of Workshop Technology by Hajra Choudhary PDFDocument4 pagesElements of Workshop Technology by Hajra Choudhary PDFShakeel Mohmand25% (12)
- Gear Design NhpancholiDocument66 pagesGear Design NhpancholiDINESH KUMARNo ratings yet
- Note On Gear BoxDocument32 pagesNote On Gear BoxanupbagNo ratings yet
- GearDocument35 pagesGearNIYASNo ratings yet
- 8 Helical GearsDocument12 pages8 Helical GearsWahyu Purwo RaharjoNo ratings yet
- Gearbox: Fundamental, Operation & MaintenanceDocument80 pagesGearbox: Fundamental, Operation & MaintenanceGuru VagaNo ratings yet
- Transmission System of Gear BoxDocument86 pagesTransmission System of Gear BoxAmit Kumar Uke100% (4)
- Gearboxashu1 150911200033 Lva1 App6891Document80 pagesGearboxashu1 150911200033 Lva1 App6891Jojee MarieNo ratings yet
- Unit - 4Document85 pagesUnit - 4Shriparno deyNo ratings yet
- Design of Spur GearDocument67 pagesDesign of Spur GearShubham DhurjadNo ratings yet
- Design of GearsDocument40 pagesDesign of GearsSurya PrakashNo ratings yet
- Design of Transmission Systems: Prepared by Dr.A.Vinoth JebarajDocument148 pagesDesign of Transmission Systems: Prepared by Dr.A.Vinoth Jebarajrishi raja RajaNo ratings yet
- Cylindrical Compression Helix Springs For Suspension SystemsFrom EverandCylindrical Compression Helix Springs For Suspension SystemsNo ratings yet
- Cs Unitec Impact Wrenches Pneumatic HydraulicDocument1 pageCs Unitec Impact Wrenches Pneumatic HydraulicWill SudNo ratings yet
- BPT 13 Balanced Pressure Thermostatic Steam TrapDocument2 pagesBPT 13 Balanced Pressure Thermostatic Steam Trapmember1000No ratings yet
- 603Document7 pages603jessa marie sayconNo ratings yet
- Assignment On Wave Function and Born's Interpretation On Wave FunctionDocument6 pagesAssignment On Wave Function and Born's Interpretation On Wave FunctionMehak MughalNo ratings yet
- Roller Conveyor CatalogueDocument50 pagesRoller Conveyor CatalogueAbudo Paixao100% (2)
- WEG Alternadores Sincronos Linha Ag10 12638144 Manual Portugues BRDocument139 pagesWEG Alternadores Sincronos Linha Ag10 12638144 Manual Portugues BRAntonio Monteiro100% (1)
- Pipe BranchDocument761 pagesPipe Branchjnmanivannanmech50% (2)
- Seismic Evaluation of Vertically Irregular Building Frames With Stiffness, Strength, Combined-Stiffness-And-Strength and Mass IrregularitiesDocument22 pagesSeismic Evaluation of Vertically Irregular Building Frames With Stiffness, Strength, Combined-Stiffness-And-Strength and Mass Irregularitiesjorge david zumaran riveraNo ratings yet
- Design Validation PlanDocument3 pagesDesign Validation Planpankaj100% (2)
- 9792 PHYSICS: MARK SCHEME For The May/June 2010 Question Paper For The Guidance of TeachersDocument14 pages9792 PHYSICS: MARK SCHEME For The May/June 2010 Question Paper For The Guidance of TeachersbobNo ratings yet
- Mechanical OperationsDocument3 pagesMechanical Operationstrades korNo ratings yet
- RCC and Steel Conventional QuestionsDocument4 pagesRCC and Steel Conventional QuestionsICE Group of Education BhopalNo ratings yet
- Air ConditioningDocument5 pagesAir ConditioningDC1234No ratings yet
- Mvjce Me 6 SemDocument101 pagesMvjce Me 6 SemAkash AkuNo ratings yet
- Automobile Workshop PracticeDocument2 pagesAutomobile Workshop PracticeSachi MensiNo ratings yet
- Art 10.1007 s00603-012-0220-7 Block Flexural Toppling Amini PDFDocument14 pagesArt 10.1007 s00603-012-0220-7 Block Flexural Toppling Amini PDFJosé Carlos Bustamante MoralesNo ratings yet
- PHYSICS (CE & ME) (PH-21102) Introduction To Mechanics: Module 1: (8 Lectures)Document1 pagePHYSICS (CE & ME) (PH-21102) Introduction To Mechanics: Module 1: (8 Lectures)Supratim RoyNo ratings yet
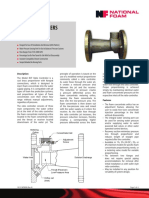
- National Foam ManualDocument4 pagesNational Foam ManualRiky AyalaNo ratings yet
- API-620 Nde TestDocument3 pagesAPI-620 Nde Testjojo_323No ratings yet
- Material Testing LaboratoryDocument13 pagesMaterial Testing Laboratorydantan187100% (1)
- Auto Chassis NotesDocument70 pagesAuto Chassis NotesSrinivas NadellaNo ratings yet
- Conveyor Belt Calculations - Bright Hub EngineeringDocument7 pagesConveyor Belt Calculations - Bright Hub EngineeringManne RajuNo ratings yet
- Bircosir - NW 150: Stability and DiversityDocument5 pagesBircosir - NW 150: Stability and Diversityjagath2005ukNo ratings yet
- States of Matter - Handwritten Notes - Yakeen 2.0 2024 (Alpha)Document28 pagesStates of Matter - Handwritten Notes - Yakeen 2.0 2024 (Alpha)King KingNo ratings yet
- KTA19-G3A: Engine Model: Reference InformationDocument3 pagesKTA19-G3A: Engine Model: Reference InformationTeodoro Cornelius AltuveNo ratings yet
- PET 332 E Production Engineering & Surface FacilitiesDocument13 pagesPET 332 E Production Engineering & Surface Facilities000No ratings yet
- Bond Graph Modeling and Computer Simulation of Automotive Torque ConvertersDocument22 pagesBond Graph Modeling and Computer Simulation of Automotive Torque ConvertersPratik ShahNo ratings yet
- WSS - 071 Scour Valve Installations - General Arrangement and DetailsDocument1 pageWSS - 071 Scour Valve Installations - General Arrangement and DetailsMyrahma Love100% (1)
- Modification and Development in Air CoolerDocument6 pagesModification and Development in Air CoolerSONUNo ratings yet
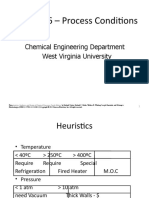
- Chapter 06 - Understanding Process ConditionsDocument20 pagesChapter 06 - Understanding Process ConditionsMohammed DaghurNo ratings yet