You might also like
- 1 - Depth of Fixity of Piles in Clay Under Dynamic Lateral PDFDocument15 pages1 - Depth of Fixity of Piles in Clay Under Dynamic Lateral PDFSwapan PaulNo ratings yet
- Notes For RobDocument7 pagesNotes For RobAmajdNo ratings yet
- Design of RiprapDocument15 pagesDesign of RiprapJoko NugrohoNo ratings yet
- Bridge Design Standard - IntroductionDocument1 pageBridge Design Standard - IntroductionA. S. M. Elias ShahNo ratings yet
- Compendium On Silting of Reservoirs in India - CWC (2015)Document219 pagesCompendium On Silting of Reservoirs in India - CWC (2015)saradhi26No ratings yet
- Pile Cap of Abutment A1 & A2 (Takarma) - 1Document1 pagePile Cap of Abutment A1 & A2 (Takarma) - 1Nilay GandhiNo ratings yet
- Indian Standard: Prestressed Concrete Pipes (Including Specials) - SpecificationDocument36 pagesIndian Standard: Prestressed Concrete Pipes (Including Specials) - Specificationsixramesh123No ratings yet
- Bhadbhut Barrage Project Across Naramada RiverDocument14 pagesBhadbhut Barrage Project Across Naramada RiverPalashXVNo ratings yet
- 4 Retrofitting of BridgesDocument19 pages4 Retrofitting of BridgeskhelanparmarNo ratings yet
- Stay CablesDocument22 pagesStay Cablesalex_g00dyNo ratings yet
- Seismic Arrester DesignDocument14 pagesSeismic Arrester DesignMahendra SuryavanshiNo ratings yet
- Maintenance of PSC GirdersDocument10 pagesMaintenance of PSC GirdersradhakrishnangNo ratings yet
- 2Document105 pages2Zankar R ParikhNo ratings yet
- 70r Loading - PDFXHRXHRDocument14 pages70r Loading - PDFXHRXHRbalwant_negi7520No ratings yet
- Cable Profile For Prestressing and Calculation of Eccentricities of Substiture CableDocument4 pagesCable Profile For Prestressing and Calculation of Eccentricities of Substiture Cablerabindra choudhary0% (1)
- Well FoundationDocument10 pagesWell FoundationGopal SinghNo ratings yet
- 1 High Level Bridge Submersible Bridge: DistinguishDocument14 pages1 High Level Bridge Submersible Bridge: Distinguishharnishtanna212No ratings yet
- Link SlabDocument6 pagesLink SlabNguyễn Quang HoàiNo ratings yet
- Keynote D.V. KarandikarDocument47 pagesKeynote D.V. KarandikarlingamkumarNo ratings yet
- 08-2011 Friction Slab Crash Barrier PDFDocument9 pages08-2011 Friction Slab Crash Barrier PDFraviNo ratings yet
- PW232 KMV Nakrekal RS Wall Design Report - MacLoopDocument98 pagesPW232 KMV Nakrekal RS Wall Design Report - MacLoopAnde Bhanu100% (1)
- Slope Movement Processes and CharacteristicsDocument39 pagesSlope Movement Processes and CharacteristicsAzealdeen AlJawadiNo ratings yet
- Name of Work:-Construction of Major Bridge Across River Vattigedda at KM 492/2-4 of Raipur - Visakhapatnam Section of NH-43 in Andhra PradeshDocument4 pagesName of Work:-Construction of Major Bridge Across River Vattigedda at KM 492/2-4 of Raipur - Visakhapatnam Section of NH-43 in Andhra PradeshUpadhyayula Subba RaoNo ratings yet
- Pot BearingsDocument14 pagesPot BearingsJosue LewandowskiNo ratings yet
- Estimate Electrical Guwahati UniversityDocument19 pagesEstimate Electrical Guwahati UniversityTandon Abhilash BorthakurNo ratings yet
- Proposed Arch Bridge On Lower Lake of Bhopal: A Case StudyDocument3 pagesProposed Arch Bridge On Lower Lake of Bhopal: A Case StudyInnovative Research PublicationsNo ratings yet
- Urban BrochureDocument25 pagesUrban BrochureCarlos NietoNo ratings yet
- Civil Engg PDFDocument53 pagesCivil Engg PDFSatyadev RanaNo ratings yet
- Gabion, Geo Textile & RenomatressDocument4 pagesGabion, Geo Textile & RenomatressSandun NimanthaNo ratings yet
- Bearing Design MethodDocument38 pagesBearing Design MethodTeguh FahrezaNo ratings yet
- 4 - Strength Design Method Part 1Document25 pages4 - Strength Design Method Part 1Mohamad Duhoki100% (1)
- Deck Slab DesignDocument27 pagesDeck Slab Designquithanqui100% (1)
- HOBBS (1957) - An Investigation Into The Stress Distribution in Pile Caps With Some Notes On DesignDocument34 pagesHOBBS (1957) - An Investigation Into The Stress Distribution in Pile Caps With Some Notes On DesignVítor FreitasNo ratings yet
- 03 Section 2 Example Bridge (E)Document11 pages03 Section 2 Example Bridge (E)Diego Benavides KNo ratings yet
- Apsara BorderDocument15 pagesApsara BorderskumarsrNo ratings yet
- Well Foundation - RVNLDocument9 pagesWell Foundation - RVNLVenkateswarlu DanduNo ratings yet
- Bridge CantileverDocument9 pagesBridge CantileverPriyal vasaiwalaNo ratings yet
- Pipe CulvertDocument8 pagesPipe CulvertKrishna DixitNo ratings yet
- Design ChannelDocument11 pagesDesign Channelroid ghoziNo ratings yet
- Box Pushing Technology PresentationDocument13 pagesBox Pushing Technology Presentationlaxmicc100% (1)
- MBR - DTMR - Design Criteria For Large Box Culverts PDFDocument9 pagesMBR - DTMR - Design Criteria For Large Box Culverts PDFfatherofgeorgeNo ratings yet
- 21.08.2019 ProjectReportandCostEstimate4Document299 pages21.08.2019 ProjectReportandCostEstimate4dkanakaraoNo ratings yet
- Em 1110-2-2901Document206 pagesEm 1110-2-2901Naveen RNo ratings yet
- Culvert CatalogDocument13 pagesCulvert CatalogmehmilNo ratings yet
- 1.0 Detailed Design of 16 Span Minor BridgeDocument3 pages1.0 Detailed Design of 16 Span Minor BridgeAnonymous wosn1ly100% (1)
- Basic Function of Retaining WallDocument9 pagesBasic Function of Retaining Wallillya amyra100% (1)
- 003-River and Chawsnnel Training Works Design PDFDocument2 pages003-River and Chawsnnel Training Works Design PDFFaisal SardarNo ratings yet
- Case Histories On The Use of Helical Piles For Retrofitting and New ConstructionDocument6 pagesCase Histories On The Use of Helical Piles For Retrofitting and New ConstructionLeonardo SanchezNo ratings yet
- 1 PDFDocument22 pages1 PDFNeeraj Sharma0% (1)
- Elestomeric BearingsDocument152 pagesElestomeric BearingsvaibhavNo ratings yet
- Container Yard Geocell Design PDFDocument9 pagesContainer Yard Geocell Design PDFfemiNo ratings yet
- 5.0 Cost Estimate R (2) For Package - II Dated 14-05-2021Document51 pages5.0 Cost Estimate R (2) For Package - II Dated 14-05-2021Mohanraj SNo ratings yet
- Design of Precast Pier Cap - 1Document24 pagesDesign of Precast Pier Cap - 1Ankush SharmaNo ratings yet
- Elastomeric Bearings - CosmecDocument6 pagesElastomeric Bearings - CosmecGermar PorquerinoNo ratings yet
- Bearing Design - Steel ReinforcementDocument10 pagesBearing Design - Steel ReinforcementRajesh SarswaNo ratings yet
- Elastomeric Bearing Design ExampleDocument14 pagesElastomeric Bearing Design ExampleTan Nguyen Cong100% (2)
- Elastomeric Bearing 1 PDFDocument9 pagesElastomeric Bearing 1 PDFSuresh YedureswaramNo ratings yet
- Elastomeric Bearing 1Document9 pagesElastomeric Bearing 1Anonymous jLLjBdrNo ratings yet
- sHEAR MODULUS PDFDocument12 pagessHEAR MODULUS PDFheki2000No ratings yet
- Bridge BearingsDocument13 pagesBridge BearingsBenard OmondiNo ratings yet
- XI Physics Holiday AssignmentsDocument2 pagesXI Physics Holiday AssignmentsAnushka MishraNo ratings yet
- 3.1 Dynamics (Scalars and Vectors, Pressure)Document4 pages3.1 Dynamics (Scalars and Vectors, Pressure)SalmanNo ratings yet
- 02.1-WCDMA Basic Principle of Radio Propagation - 20051214Document20 pages02.1-WCDMA Basic Principle of Radio Propagation - 20051214kltowerNo ratings yet
- Strcteng200 S1 2022Document7 pagesStrcteng200 S1 2022ChengNo ratings yet
- Water HammerDocument52 pagesWater HammerNidas SameeraNo ratings yet
- Design of Fuzzi-Pid Tracking Controller For IndustDocument8 pagesDesign of Fuzzi-Pid Tracking Controller For IndustBernadetteNo ratings yet
- Open-Channel Flow Under A GateDocument6 pagesOpen-Channel Flow Under A GatesengsosNo ratings yet
- Cone CVTDocument4 pagesCone CVTArun KumarNo ratings yet
- Plain & Reinforced Concrete-1: Lecture # 2Document14 pagesPlain & Reinforced Concrete-1: Lecture # 2Manoj BalakrishnanNo ratings yet
- IS800 2007 I-Section 1 Detailed CalculationDocument5 pagesIS800 2007 I-Section 1 Detailed CalculationJigar Piyush ShahNo ratings yet
- Study of Oil Seals On Automotive Shock AbsorberDocument14 pagesStudy of Oil Seals On Automotive Shock AbsorberAgoenNo ratings yet
- Tutorial 2 - Failure Theories ReliabilityDocument10 pagesTutorial 2 - Failure Theories ReliabilitysharleenNo ratings yet
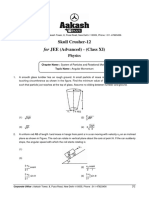
- Skull Crusher-12 - Class XI - JEE (Adv) - PhysicsDocument7 pagesSkull Crusher-12 - Class XI - JEE (Adv) - Physicslootera715No ratings yet
- LMS Amesim-Mechanics and Vibrations-Academic Tutorial Mech1DoF FreeDocument11 pagesLMS Amesim-Mechanics and Vibrations-Academic Tutorial Mech1DoF FreeD'Armi StefanoNo ratings yet
- Energy Loss in PipesDocument8 pagesEnergy Loss in PipesRo Win83% (6)
- Thermodiffusion - Soret EffectDocument35 pagesThermodiffusion - Soret EffectSalethCausilDurangoNo ratings yet
- Course Home1 PDFDocument12 pagesCourse Home1 PDFSandeep BadigantiNo ratings yet
- Reynolds, Osborne. 1894 On The Dynamical Theory of Incompresible Viscous Fluids and The Determination of The Criterion PDFDocument42 pagesReynolds, Osborne. 1894 On The Dynamical Theory of Incompresible Viscous Fluids and The Determination of The Criterion PDFJosé Luis Nava HernándezNo ratings yet
- BennettDocument271 pagesBennettLew MingNo ratings yet
- Theorical TRANSLATION Official EnglishDocument28 pagesTheorical TRANSLATION Official EnglishnoobNo ratings yet
- Physical Pendulum: ExperimentDocument6 pagesPhysical Pendulum: ExperimentJimNo ratings yet
- Contiguous Pile Design With StrutsDocument5 pagesContiguous Pile Design With StrutsHabib Ur RahmanNo ratings yet
- Basic HelicopterDocument36 pagesBasic HelicopterKevin Ramadhan LuqmanNo ratings yet
- Ship Stability in Wave A Proposal Method For Dynamic BehaviourDocument6 pagesShip Stability in Wave A Proposal Method For Dynamic BehaviourParbati SahaNo ratings yet
- Basic Concepts of Fluid TransportDocument14 pagesBasic Concepts of Fluid TransportBernard BaluyotNo ratings yet
- Uni AbujaDocument3 pagesUni AbujaHenry DiyokeNo ratings yet
- Study On Static and Dynamic Characteristics of Moving Magnet Linear CompressorsDocument11 pagesStudy On Static and Dynamic Characteristics of Moving Magnet Linear CompressorssubruaNo ratings yet
- Simulation of Fatigue Composite Ncode To Post2 PDFDocument31 pagesSimulation of Fatigue Composite Ncode To Post2 PDFylionkingxNo ratings yet
- Surge Analysis and Design - Case StudyDocument10 pagesSurge Analysis and Design - Case StudyRaghuveer Rao PallepatiNo ratings yet
- CFD Report: Submitted by Vipul Agrawal 2018H1410129H M.E Design EngineeringDocument12 pagesCFD Report: Submitted by Vipul Agrawal 2018H1410129H M.E Design EngineeringVipul AgrawalNo ratings yet
- Laws of UX: Using Psychology to Design Better Products & ServicesFrom EverandLaws of UX: Using Psychology to Design Better Products & ServicesRating: 5 out of 5 stars5/5 (9)
- Electrical Engineering 101: Everything You Should Have Learned in School...but Probably Didn'tFrom EverandElectrical Engineering 101: Everything You Should Have Learned in School...but Probably Didn'tRating: 4.5 out of 5 stars4.5/5 (27)
- Transformed: Moving to the Product Operating ModelFrom EverandTransformed: Moving to the Product Operating ModelRating: 4 out of 5 stars4/5 (1)
- Artificial Intelligence Revolution: How AI Will Change our Society, Economy, and CultureFrom EverandArtificial Intelligence Revolution: How AI Will Change our Society, Economy, and CultureRating: 4.5 out of 5 stars4.5/5 (2)
- The Design Thinking Playbook: Mindful Digital Transformation of Teams, Products, Services, Businesses and EcosystemsFrom EverandThe Design Thinking Playbook: Mindful Digital Transformation of Teams, Products, Services, Businesses and EcosystemsNo ratings yet
- The Age of Agile: How Smart Companies Are Transforming the Way Work Gets DoneFrom EverandThe Age of Agile: How Smart Companies Are Transforming the Way Work Gets DoneRating: 4.5 out of 5 stars4.5/5 (5)
- The Jobs To Be Done Playbook: Align Your Markets, Organization, and Strategy Around Customer NeedsFrom EverandThe Jobs To Be Done Playbook: Align Your Markets, Organization, and Strategy Around Customer NeedsRating: 5 out of 5 stars5/5 (1)
- Analog Design and Simulation Using OrCAD Capture and PSpiceFrom EverandAnalog Design and Simulation Using OrCAD Capture and PSpiceNo ratings yet
- 507 Mechanical Movements: Mechanisms and DevicesFrom Everand507 Mechanical Movements: Mechanisms and DevicesRating: 4 out of 5 stars4/5 (28)
- Practical Troubleshooting of Electrical Equipment and Control CircuitsFrom EverandPractical Troubleshooting of Electrical Equipment and Control CircuitsRating: 4 out of 5 stars4/5 (5)
- Articulating Design Decisions: Communicate with Stakeholders, Keep Your Sanity, and Deliver the Best User ExperienceFrom EverandArticulating Design Decisions: Communicate with Stakeholders, Keep Your Sanity, and Deliver the Best User ExperienceRating: 4 out of 5 stars4/5 (19)
- Design for How People Think: Using Brain Science to Build Better ProductsFrom EverandDesign for How People Think: Using Brain Science to Build Better ProductsRating: 4 out of 5 stars4/5 (8)
- CATIA V5-6R2015 Basics - Part I : Getting Started and Sketcher WorkbenchFrom EverandCATIA V5-6R2015 Basics - Part I : Getting Started and Sketcher WorkbenchRating: 4 out of 5 stars4/5 (10)
- Designing for Behavior Change: Applying Psychology and Behavioral Economics 2nd EditionFrom EverandDesigning for Behavior Change: Applying Psychology and Behavioral Economics 2nd EditionNo ratings yet
- Heat Exchanger Design Guide: A Practical Guide for Planning, Selecting and Designing of Shell and Tube ExchangersFrom EverandHeat Exchanger Design Guide: A Practical Guide for Planning, Selecting and Designing of Shell and Tube ExchangersRating: 4 out of 5 stars4/5 (13)
- UX: Simple and Effective Methods for Designing UX Great Products Using UX Programming TheoriesFrom EverandUX: Simple and Effective Methods for Designing UX Great Products Using UX Programming TheoriesNo ratings yet
- Interfacing PIC Microcontrollers: Embedded Design by Interactive SimulationFrom EverandInterfacing PIC Microcontrollers: Embedded Design by Interactive SimulationNo ratings yet