You might also like
- Drying and Repairing WallsDocument2 pagesDrying and Repairing WallsIngeniero EstructuralNo ratings yet
- Millennium ProblemsDocument2 pagesMillennium ProblemsIngeniero EstructuralNo ratings yet
- Regulation and Licensure in EngineeringDocument15 pagesRegulation and Licensure in EngineeringIngeniero EstructuralNo ratings yet
- Liebherr - LR 1350-1Document2 pagesLiebherr - LR 1350-1Ingeniero EstructuralNo ratings yet
- "Critical Lift Plan" - OtherDocument3 pages"Critical Lift Plan" - OtherIngeniero EstructuralNo ratings yet
- Pits & QuarriesDocument11 pagesPits & QuarriesIngeniero EstructuralNo ratings yet
- Rail Grading Sections: ISO 9001:2008 and AAR M-1003 CertifiedDocument3 pagesRail Grading Sections: ISO 9001:2008 and AAR M-1003 CertifiedIngeniero EstructuralNo ratings yet
- BoulderDocument2 pagesBoulderIngeniero EstructuralNo ratings yet
- IgnimbriteDocument7 pagesIgnimbriteIngeniero EstructuralNo ratings yet
- Very Hard Rock ExcavationDocument3 pagesVery Hard Rock ExcavationIngeniero EstructuralNo ratings yet
- Construction MethodsDocument3 pagesConstruction MethodsIngeniero EstructuralNo ratings yet
- SF - Verify Analysis Vs Design SectionDocument1 pageSF - Verify Analysis Vs Design SectionIngeniero EstructuralNo ratings yet
- SF View-Revise Preferences PDFDocument1 pageSF View-Revise Preferences PDFIngeniero EstructuralNo ratings yet
- Load CombinationsDocument5 pagesLoad CombinationsIngeniero EstructuralNo ratings yet
- Interactive Database Editing - (Table Name) FormDocument5 pagesInteractive Database Editing - (Table Name) FormIngeniero EstructuralNo ratings yet
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (895)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (588)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (400)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (345)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (121)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- Mechanical Testing (Tension)Document33 pagesMechanical Testing (Tension)ZANTHERNo ratings yet
- Toward A Consistent Design of Structural ConcreteDocument19 pagesToward A Consistent Design of Structural ConcreteStanislav Chirila100% (1)
- Refined Explicit Integration of Elastoplastic Models With Automatic Error ControlDocument40 pagesRefined Explicit Integration of Elastoplastic Models With Automatic Error ControlKarena QuirozNo ratings yet
- ME BTechDocument196 pagesME BTechAbhijeet MishraNo ratings yet
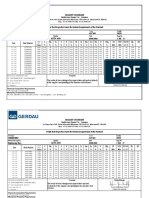
- Quality Standard: Gerdau Aços Longos S.A. - CearenseDocument17 pagesQuality Standard: Gerdau Aços Longos S.A. - CearenseLenin Ch PereyraNo ratings yet
- Civil Engineering Design - 2021 - Schlicke - Calculation of Maximum Crack Width For Practical Design of Reinforced ConcreteDocument17 pagesCivil Engineering Design - 2021 - Schlicke - Calculation of Maximum Crack Width For Practical Design of Reinforced Concretedmt7nzztcmNo ratings yet
- Properties in Shear: (Eg. Ssy 0.5sy)Document34 pagesProperties in Shear: (Eg. Ssy 0.5sy)Yusuf SahinNo ratings yet
- Construction and Building Materials: Gelen Gael Chewe Ngapeya, Danièle Waldmann, Franck ScholzenDocument16 pagesConstruction and Building Materials: Gelen Gael Chewe Ngapeya, Danièle Waldmann, Franck ScholzenFauziah AzizNo ratings yet
- 2011 JCOMA Lsdyna SinusoidDocument17 pages2011 JCOMA Lsdyna Sinusoidcharan2kNo ratings yet
- Concrete Model in AdinaDocument28 pagesConcrete Model in AdinaAdolfo Gálvez VillacortaNo ratings yet
- Cem TechDocument24 pagesCem TechDeepak SinhaNo ratings yet
- Experiment 1 Tensile and Torsion TestDocument27 pagesExperiment 1 Tensile and Torsion TestMuhd Fauzan Ibrahim100% (1)
- Mechanical Properties of MaterialsDocument33 pagesMechanical Properties of MaterialsAaron Dela CruzNo ratings yet
- Journal of Adhesion Science and TechnologyDocument28 pagesJournal of Adhesion Science and TechnologyALVIN RIZANI A SNo ratings yet
- The Determination of The Residual Strength of Hard Rock Crush PillarsDocument10 pagesThe Determination of The Residual Strength of Hard Rock Crush PillarshendrawanNo ratings yet
- Material ScienceDocument32 pagesMaterial Sciencepaulquerol04No ratings yet
- Creep, Shrinkage & ElasticityDocument24 pagesCreep, Shrinkage & ElasticityMia Hussain0% (1)
- Dorfman & Ogden MullinsEffectReinforcedRubberDocument24 pagesDorfman & Ogden MullinsEffectReinforcedRubberNelson VieiraNo ratings yet
- Mechanics of Materia1 Combined Bending and TorsionDocument4 pagesMechanics of Materia1 Combined Bending and Torsionhammad ghaffarNo ratings yet
- 300+ (UPDATED) Strength of Materials Interview QuestionsDocument4 pages300+ (UPDATED) Strength of Materials Interview QuestionsBaydaa QaidyNo ratings yet
- 1963 - Janbu - Soil Compressibility As Determined by Oedometer and Triaxial EoedDocument7 pages1963 - Janbu - Soil Compressibility As Determined by Oedometer and Triaxial EoedDmitry OlshanskyNo ratings yet
- RILEM TC 162-TDF - Test and Design Methods For Steel Fibre Reinforced Concrete - 3Document9 pagesRILEM TC 162-TDF - Test and Design Methods For Steel Fibre Reinforced Concrete - 3CuriosoNo ratings yet
- Construction Stages and Column Shortening Analysis in Tall Buildings PDFDocument49 pagesConstruction Stages and Column Shortening Analysis in Tall Buildings PDFPhu NguyenNo ratings yet
- 246 C H A P T E R 6 Mechanical Properties of Metals I: Final PDF To PrinterDocument1 page246 C H A P T E R 6 Mechanical Properties of Metals I: Final PDF To PrinterMattia MatrangaNo ratings yet
- TALAT Lecture 4702: Factors Influencing The Strength of Adhesive JointsDocument13 pagesTALAT Lecture 4702: Factors Influencing The Strength of Adhesive JointsCORE MaterialsNo ratings yet
- Design of Doubly-Reinforced Beams: Lecture 2.c.2 by Engr. Jerry B. Maratas and Engr. Ricardo FornisDocument12 pagesDesign of Doubly-Reinforced Beams: Lecture 2.c.2 by Engr. Jerry B. Maratas and Engr. Ricardo FornisGodfrey RuizNo ratings yet
- Mechanical Nonlin 13.0 WS 06A CreepDocument13 pagesMechanical Nonlin 13.0 WS 06A CreepShaheen S. Ratnani100% (1)
- Master PPT MD UNIT III MD S P DHAVANEDocument81 pagesMaster PPT MD UNIT III MD S P DHAVANESachin DhavaneNo ratings yet
- Generic Form of Stress-Strain Equations For Concrete (Yip, 1998)Document10 pagesGeneric Form of Stress-Strain Equations For Concrete (Yip, 1998)Jhe TaguinesNo ratings yet