You might also like
- Mult RegressionDocument28 pagesMult Regressioniabureid7460No ratings yet
- Verifying Uncertainty Model with Monte Carlo SimDocument9 pagesVerifying Uncertainty Model with Monte Carlo SimrogeriocorreaNo ratings yet
- MultivariableRegression 6Document44 pagesMultivariableRegression 6Alada manaNo ratings yet
- Vmls Additional ExercisesDocument66 pagesVmls Additional ExercisesmarcosilvasegoviaNo ratings yet
- 2.linear RegressionDocument49 pages2.linear Regressionkoleti vikasNo ratings yet
- Estimation of Time-Varying Par in STAT Models - Bertsimas Et - Al. (1999) - PUBDocument21 pagesEstimation of Time-Varying Par in STAT Models - Bertsimas Et - Al. (1999) - PUBWaisak Purnomo HNo ratings yet
- CH 07Document21 pagesCH 07Tibet Boğazköy AkyürekNo ratings yet
- A Mathematical Model Analysis PDFDocument13 pagesA Mathematical Model Analysis PDFaadit jainNo ratings yet
- 2 - Ijpast 512 V16N1.170230601Document13 pages2 - Ijpast 512 V16N1.170230601Ahmed FenneurNo ratings yet
- Chap7 Random ProcessDocument21 pagesChap7 Random ProcessSeham RaheelNo ratings yet
- Numerical Programming I (For CSE) : Final ExamDocument8 pagesNumerical Programming I (For CSE) : Final ExamhisuinNo ratings yet
- Semi Producto Tensorial de MatricesDocument36 pagesSemi Producto Tensorial de MatricesAarón Castillo JiménezNo ratings yet
- Stochastic Processes, Detection and Estimation: 6.432 Course NotesDocument52 pagesStochastic Processes, Detection and Estimation: 6.432 Course NotesUrahara JefNo ratings yet
- Computing Orthonormal Sets in 2D, 3D, and 4DDocument12 pagesComputing Orthonormal Sets in 2D, 3D, and 4DBenjamin FranklinNo ratings yet
- Chapter 2Document30 pagesChapter 2Michiel Van VoorenNo ratings yet
- Image Registration TechniquesDocument10 pagesImage Registration TechniquesSagar NerellaNo ratings yet
- EGR 310 Lab: Uncertainty Estimation WorkshopDocument8 pagesEGR 310 Lab: Uncertainty Estimation WorkshopJohn SmithNo ratings yet
- ML Exercise Sheet 4Document2 pagesML Exercise Sheet 4dummyNo ratings yet
- Mock EconometricsDocument3 pagesMock Econometricsalex97blbNo ratings yet
- Sping 2009 FinalDocument15 pagesSping 2009 FinalAndrew ZellerNo ratings yet
- Question ExamplesDocument8 pagesQuestion ExamplesShakeel BhattiNo ratings yet
- Lect1 12Document32 pagesLect1 12Ankit SaxenaNo ratings yet
- SVM regression tutorial overviewDocument24 pagesSVM regression tutorial overviewDaniel RomeroNo ratings yet
- Simple Linear Regression and Multiple Linear Regression: MAST 6474 Introduction To Data Analysis IDocument15 pagesSimple Linear Regression and Multiple Linear Regression: MAST 6474 Introduction To Data Analysis IJohn SmithNo ratings yet
- Debre Tabor University Econometrics AssignmentDocument8 pagesDebre Tabor University Econometrics AssignmentbantalemeNo ratings yet
- Random Process PDFDocument91 pagesRandom Process PDFramakant.savranNo ratings yet
- To Print - RandomnumberDocument29 pagesTo Print - RandomnumberfterasawmyNo ratings yet
- Boolean Algebra Simplifies Fault Tree AnalysisDocument9 pagesBoolean Algebra Simplifies Fault Tree AnalysisNanda IlhamNo ratings yet
- TMA1111 Regression & Correlation AnalysisDocument13 pagesTMA1111 Regression & Correlation AnalysisMATHAVAN A L KRISHNANNo ratings yet
- Curve FittingDocument12 pagesCurve FittingSanoj KushwahaNo ratings yet
- Espe 95Document5 pagesEspe 95Sofiane BessaiNo ratings yet
- Guaranteed Intervals For Kolmogorov's Theorem (And Their Possible Relation To Neural Networks)Document13 pagesGuaranteed Intervals For Kolmogorov's Theorem (And Their Possible Relation To Neural Networks)yorch7No ratings yet
- CH 14simulationmethods24Document10 pagesCH 14simulationmethods24joyashariNo ratings yet
- LS102: Linear Time-Invariant SystemsDocument8 pagesLS102: Linear Time-Invariant SystemsBayar JargalNo ratings yet
- Numerical Analysis Lecture Notes: 1. Computer ArithmeticDocument6 pagesNumerical Analysis Lecture Notes: 1. Computer ArithmeticSaid BourazzaNo ratings yet
- 103 ExercisesDocument70 pages103 Exerciseshungbkpro90No ratings yet
- 978-1-6654-7661-4/22/$31.00 ©2022 Ieee 1Document12 pages978-1-6654-7661-4/22/$31.00 ©2022 Ieee 1vnodataNo ratings yet
- Shanghai Jiaotong University Shanghai Advanced Institution of FinanceDocument3 pagesShanghai Jiaotong University Shanghai Advanced Institution of FinanceIvan WangNo ratings yet
- ACFrOgCMX8s4TNMIypTS-sGajrvoRmTIGGs7j018QP_hSLYDnoi79LD8gsU-WUsRovrl-BxT33_A18ETvpqYqpTcbOX-6FWuwiVdq2at6Ztpnkws_gxcfLPRfdXO58N9cv8wZaQX6pLbFX8WazNrDocument19 pagesACFrOgCMX8s4TNMIypTS-sGajrvoRmTIGGs7j018QP_hSLYDnoi79LD8gsU-WUsRovrl-BxT33_A18ETvpqYqpTcbOX-6FWuwiVdq2at6Ztpnkws_gxcfLPRfdXO58N9cv8wZaQX6pLbFX8WazNrIRINA ALEXANDRA GeorgescuNo ratings yet
- F (X) Is ReviewedDocument18 pagesF (X) Is ReviewedSumedh KakdeNo ratings yet
- An Introduction To Affine ArithmeticDocument16 pagesAn Introduction To Affine Arithmeticgigio lassoNo ratings yet
- Panel Data Analysis With Stata Part 1: Fixed Effects and Random Effects ModelsDocument26 pagesPanel Data Analysis With Stata Part 1: Fixed Effects and Random Effects Modelssyeda uzmaNo ratings yet
- A Tutorial on ν-Support Vector Machines: 1 An Introductory ExampleDocument29 pagesA Tutorial on ν-Support Vector Machines: 1 An Introductory Exampleaxeman113No ratings yet
- Fuzzy 5Document12 pagesFuzzy 5Basma ElNo ratings yet
- Maxwell's Equations For Electromagnetic WavesDocument54 pagesMaxwell's Equations For Electromagnetic Wavesdmsoares1989No ratings yet
- General Physics 106 Lab ManualDocument9 pagesGeneral Physics 106 Lab ManualFrancis anandNo ratings yet
- Linear Regression StatsDocument2 pagesLinear Regression StatsytnateNo ratings yet
- NOTES-Intro To Hilbert SpacesDocument28 pagesNOTES-Intro To Hilbert SpacesdebmallyNo ratings yet
- Computing Sample Covariances from Interval DataDocument8 pagesComputing Sample Covariances from Interval Dataspikedes123No ratings yet
- Random ProcessDocument21 pagesRandom ProcessgkmkkNo ratings yet
- Regression and CorrelationDocument13 pagesRegression and CorrelationzNo ratings yet
- 09 Inference For Regression Part1Document12 pages09 Inference For Regression Part1Rama DulceNo ratings yet
- GP Under UncertaintyDocument10 pagesGP Under UncertaintyKhan Wajahat UllahNo ratings yet
- 123 WPS OfficeDocument7 pages123 WPS OfficeMichael GreyNo ratings yet
- Correlation in Random VariablesDocument6 pagesCorrelation in Random VariablesMadhu Babu SikhaNo ratings yet
- Chapter 02Document14 pagesChapter 02iramanwarNo ratings yet
- 0 Vector and Tensor Algebra: 0.1 Vectors and The Summation ConventionDocument31 pages0 Vector and Tensor Algebra: 0.1 Vectors and The Summation ConventionSuraj JayswalNo ratings yet
- Annals Rev Engineering Dynamic NetworksDocument10 pagesAnnals Rev Engineering Dynamic NetworkshmuffNo ratings yet
- Slides - FDA Implementing (QBD) IDocument20 pagesSlides - FDA Implementing (QBD) IleovenceNo ratings yet
- QBD PDFDocument5 pagesQBD PDFLadyYampuezanNo ratings yet
- R054 E81Document10 pagesR054 E81leovenceNo ratings yet
- A Comparative Cost Analysis of Biodiesel, Compressed Natural Gas, Methanol, and Diesel For TransiDocument15 pagesA Comparative Cost Analysis of Biodiesel, Compressed Natural Gas, Methanol, and Diesel For TransileovenceNo ratings yet
- Horwitz Function Technical Brief 17 Tcm18 214859Document2 pagesHorwitz Function Technical Brief 17 Tcm18 214859Nacho BressánNo ratings yet
- Methods For Reconditioning Silica GelDocument3 pagesMethods For Reconditioning Silica GelMallampati RamakrishnaNo ratings yet
- Silica Gel InfoDocument24 pagesSilica Gel InfoAkash RsNo ratings yet
- Asq Statistics Division Newsletter v16 I02 Full IssueDocument24 pagesAsq Statistics Division Newsletter v16 I02 Full IssueleovenceNo ratings yet
- Iso 9001 CRMDocument6 pagesIso 9001 CRMleovenceNo ratings yet
- Biodiesel - Use of Vegetable Oils and Their Derivatives As Alternative Diesel FuelsDocument37 pagesBiodiesel - Use of Vegetable Oils and Their Derivatives As Alternative Diesel FuelsmarcelocapiNo ratings yet
- Et Iso 21187 2012Document18 pagesEt Iso 21187 2012leovenceNo ratings yet
- Iso29001 Ims 08-2Document6 pagesIso29001 Ims 08-2Camilo GonzálezNo ratings yet
- Historical Record of Iso Membership 1947 To 2015Document4 pagesHistorical Record of Iso Membership 1947 To 2015leovenceNo ratings yet
- Annex 8 Qualification of Balances PDFDocument11 pagesAnnex 8 Qualification of Balances PDFzilangamba_s4535No ratings yet
- Iso17025 Interpretation Document For Cec Test Methods: Prepared by CEC European Accreditation Uniformity ProjectDocument9 pagesIso17025 Interpretation Document For Cec Test Methods: Prepared by CEC European Accreditation Uniformity ProjectleovenceNo ratings yet
- ISO-IEC 9126 Standard PDFDocument2 pagesISO-IEC 9126 Standard PDFleovence100% (1)
- Guidance Note For Noise in Relation To Scheduled ActivitiesDocument47 pagesGuidance Note For Noise in Relation To Scheduled ActivitiesleovenceNo ratings yet
- ISO-IEC 9126 Standard PDFDocument2 pagesISO-IEC 9126 Standard PDFleovence100% (1)
- Guidelines on method validationDocument11 pagesGuidelines on method validationWaqarAhmedButt0% (1)
- PAPER - Validation DithiocarbamatesDocument4 pagesPAPER - Validation DithiocarbamatesleovenceNo ratings yet
- A Comparative Cost Analysis of Biodiesel, Compressed Natural Gas, Methanol, and Diesel For TransiDocument15 pagesA Comparative Cost Analysis of Biodiesel, Compressed Natural Gas, Methanol, and Diesel For TransileovenceNo ratings yet
- PAPER - Validation of New MethodsDocument9 pagesPAPER - Validation of New MethodsleovenceNo ratings yet
- Method Validation 2370Document37 pagesMethod Validation 2370kentsang822No ratings yet
- Validation of alternative food microbiology methodsDocument36 pagesValidation of alternative food microbiology methodsleovence100% (1)
- Koeritzer Brazil ValidationDocument45 pagesKoeritzer Brazil ValidationleovenceNo ratings yet
- Make Your Own BiodieselDocument10 pagesMake Your Own BiodieselleovenceNo ratings yet
- Large-Scale Inference:: Empirical Bayes Methods For Estimation, Testing, and PredictionDocument7 pagesLarge-Scale Inference:: Empirical Bayes Methods For Estimation, Testing, and Predictionpanjc1019No ratings yet
- Interpretations GuidanceDocument3 pagesInterpretations GuidanceleovenceNo ratings yet
- Summarized ResumeDocument2 pagesSummarized Resumeapi-310320755No ratings yet
- IPR-Trademark Case Laws - CompendiumDocument11 pagesIPR-Trademark Case Laws - CompendiumShamilee RajkumarNo ratings yet
- Panel Data Analysis Using EViews Chapter - 3 PDFDocument49 pagesPanel Data Analysis Using EViews Chapter - 3 PDFimohamed2No ratings yet
- Project Final ReportDocument80 pagesProject Final ReportVirendra Sonawane0% (1)
- Company Profile of DAEJU CONTROL CO., LTD.Document17 pagesCompany Profile of DAEJU CONTROL CO., LTD.Ki Ho ChungNo ratings yet
- Supersafari - 2 Activity BookDocument99 pagesSupersafari - 2 Activity BookShwe Yee Thet paingNo ratings yet
- Groovy 9 – capturing RawRequest & ResponseDocument4 pagesGroovy 9 – capturing RawRequest & ResponseSirisha ChigurupatiNo ratings yet
- Metco®73F-NS-1 (-2) 10-058 PDFDocument7 pagesMetco®73F-NS-1 (-2) 10-058 PDF張政雄No ratings yet
- Manual VISSIM 540 e PDFDocument763 pagesManual VISSIM 540 e PDFEze KA100% (1)
- Market of Turboshaft EnginesDocument22 pagesMarket of Turboshaft EnginesThomas MouraNo ratings yet
- BitBox CarList 2018 08 23Document42 pagesBitBox CarList 2018 08 23manutecNo ratings yet
- Wind Load AnalysisDocument4 pagesWind Load AnalysisNiraj ShindeNo ratings yet
- Burnaby Fire Department - Evidentiary PaperDocument96 pagesBurnaby Fire Department - Evidentiary PaperNationalObserverNo ratings yet
- HSM USB Serial Driver Release NotesDocument16 pagesHSM USB Serial Driver Release NotesErnu AnatolieNo ratings yet
- Japanese Construction Firms enDocument4 pagesJapanese Construction Firms enLanang Ardi ParinggaNo ratings yet
- Shading Devices VaishaliDocument12 pagesShading Devices VaishalivaishaliNo ratings yet
- CT ratio error calculations and limitsDocument4 pagesCT ratio error calculations and limitsKamal NorlieNo ratings yet
- TGS Besar ML 8488 8684 8861 9010 9027Document8 pagesTGS Besar ML 8488 8684 8861 9010 9027SisdigNo ratings yet
- Enable Android Auto on Renault Zoe Rlink 1 SystemDocument14 pagesEnable Android Auto on Renault Zoe Rlink 1 SystemPablo PintoNo ratings yet
- QCL Certification Pvt. LTDDocument3 pagesQCL Certification Pvt. LTDRamaKantDixitNo ratings yet
- Asme Section II A-2 Sa-487 Sa-487mDocument8 pagesAsme Section II A-2 Sa-487 Sa-487mAnonymous GhPzn1xNo ratings yet
- Vapour AbsorptionDocument10 pagesVapour Absorptiongayakwad12_ramNo ratings yet
- Task 7 CompleteDocument1 pageTask 7 Completeapi-335293732No ratings yet
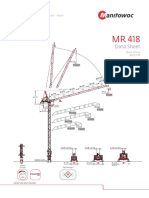
- MR418-FEM-Top Slewing Tower Cranes Imperial PDFDocument8 pagesMR418-FEM-Top Slewing Tower Cranes Imperial PDFCompass equipmentNo ratings yet
- Bobcat 853 Operator ManualDocument20 pagesBobcat 853 Operator ManualAbdul KhaliqNo ratings yet
- SOP Purchasing Manual 2011 PDFDocument220 pagesSOP Purchasing Manual 2011 PDFerpNo ratings yet
- ELER v3 Technical ManualDocument141 pagesELER v3 Technical ManualAlla Eddine G CNo ratings yet
- Development of A Sandwich-Type Cargo Floor MR Transport AircraftDocument50 pagesDevelopment of A Sandwich-Type Cargo Floor MR Transport Aircraftdeyu90No ratings yet
- ACM+System+ (Active+Control+Engine+Mount) Odisey 2016Document2 pagesACM+System+ (Active+Control+Engine+Mount) Odisey 2016Wilder M. LopezNo ratings yet
- Developing Teachers Through CoachingDocument1 pageDeveloping Teachers Through CoachingEdri Jan80% (5)