You might also like
- Compatibility and CompletenessDocument4 pagesCompatibility and CompletenessAmandeep Singh Bansal100% (1)
- Some Modeling ConsiderationsDocument5 pagesSome Modeling ConsiderationsC V CHANDRASHEKARANo ratings yet
- A Review of Techniques For Improving Mesh Quality in A Finite Element ComputationDocument8 pagesA Review of Techniques For Improving Mesh Quality in A Finite Element ComputationtanyadaNo ratings yet
- What Is Convergence in Finite Element AnalysisDocument10 pagesWhat Is Convergence in Finite Element AnalysisDeepak KumarNo ratings yet
- Fea Chapter1Document16 pagesFea Chapter1Yahia Raad Al-AniNo ratings yet
- Mesh Selection Bathe 85Document8 pagesMesh Selection Bathe 85Felipe GarciaNo ratings yet
- Metode Numerik Perpindahan PAnasDocument15 pagesMetode Numerik Perpindahan PAnaswsdodoNo ratings yet
- Introduction To Finite Element MethodsDocument4 pagesIntroduction To Finite Element MethodsOscar Frausto RamirezNo ratings yet
- Simultaneous Heat and Mass Transfer (SHMT) : 7th Semester, B.Sc. Chemical Engineering Session 2008 Delivered byDocument43 pagesSimultaneous Heat and Mass Transfer (SHMT) : 7th Semester, B.Sc. Chemical Engineering Session 2008 Delivered byClarence AG YueNo ratings yet
- Chapter 7 - FEMDocument34 pagesChapter 7 - FEMpaivensolidsnake100% (1)
- Art19 Modelo Ede EspesadorDocument32 pagesArt19 Modelo Ede EspesadorCarlos de la TorreNo ratings yet
- Collapse Load Analysis of Yield-Line ElementsDocument7 pagesCollapse Load Analysis of Yield-Line ElementsAlaa Elsisi100% (1)
- Numerical Simulation of Coupled Uid Solid Problems: Michael SCH Afer, Ilka TeschauerDocument23 pagesNumerical Simulation of Coupled Uid Solid Problems: Michael SCH Afer, Ilka TeschauerBahadır HarmancıNo ratings yet
- eCSE07-6 Technical ReportDocument30 pageseCSE07-6 Technical ReportRickyNo ratings yet
- Discretization Considerations in Moving Load Finite Element Beam ModelsDocument16 pagesDiscretization Considerations in Moving Load Finite Element Beam ModelsEugene CommerellNo ratings yet
- Numerical Solu Tio 00 S NidDocument112 pagesNumerical Solu Tio 00 S Nidmanuelperezz25No ratings yet
- Mathematical and Computer Modelling: M. TurkyilmazogluDocument8 pagesMathematical and Computer Modelling: M. TurkyilmazogluNathan RedmondNo ratings yet
- Ansys Lab ManualDocument87 pagesAnsys Lab Manualaravind174No ratings yet
- Checkerboard Instabilities in Topological Shape Optimization AlgorithmsDocument5 pagesCheckerboard Instabilities in Topological Shape Optimization Algorithmsvishal kumar sinhaNo ratings yet
- Fast Reanalysis of Geometrically Nonlinear Problems After Shape ModificationsDocument11 pagesFast Reanalysis of Geometrically Nonlinear Problems After Shape ModificationsMirkoNo ratings yet
- Factorization of Boundary Value Problems Using the Invariant Embedding MethodFrom EverandFactorization of Boundary Value Problems Using the Invariant Embedding MethodNo ratings yet
- Introduction. The Full Utilization of Quantitative Data Typically Involves The FittingDocument10 pagesIntroduction. The Full Utilization of Quantitative Data Typically Involves The FittingDivya SinghNo ratings yet
- Quadratic TetrahedronDocument16 pagesQuadratic TetrahedronKomkamol ChongbunwatanaNo ratings yet
- Discretization ErrorDocument11 pagesDiscretization Errorசுஜித் குமார்No ratings yet
- Mesh Density On ModalDocument11 pagesMesh Density On ModalabbaszkNo ratings yet
- Efg 1Document41 pagesEfg 1malenenivamsiNo ratings yet
- 15 PDFDocument28 pages15 PDFwearplayNo ratings yet
- Mixed Analytical/numerical Method Applied To The Low Reynolds Number K-Epsilon Turbulence ModelDocument8 pagesMixed Analytical/numerical Method Applied To The Low Reynolds Number K-Epsilon Turbulence ModelmojiryhamidNo ratings yet
- Computation Ef Electric Field Using FEM AproachDocument50 pagesComputation Ef Electric Field Using FEM Aproachivan(D3)No ratings yet
- Erricos Kontoghiorghes, Cristian Gatu - Optimal Quadratic Programming Algorithms (2009, Springer)Document289 pagesErricos Kontoghiorghes, Cristian Gatu - Optimal Quadratic Programming Algorithms (2009, Springer)Juan Carlos ColqueNo ratings yet
- Radial Return Method Applied in Thick-Walled Cylinder AnalysisDocument15 pagesRadial Return Method Applied in Thick-Walled Cylinder AnalysisAndré RodriguesNo ratings yet
- Thermo FluidDocument15 pagesThermo FluidLau YeowhongNo ratings yet
- Department of Engineering Mechanics, The University of Alabama, Tuscaloosa, AL 35487, USADocument62 pagesDepartment of Engineering Mechanics, The University of Alabama, Tuscaloosa, AL 35487, USAfirestone448No ratings yet
- Variational Crimes PDFDocument39 pagesVariational Crimes PDFBensingh DhasNo ratings yet
- Sood 1979Document10 pagesSood 1979Saif EvonyNo ratings yet
- Zeljkovic CedomirDocument6 pagesZeljkovic CedomirPatriceEmNo ratings yet
- Efg 1Document41 pagesEfg 1Vivek PremjiNo ratings yet
- Applications of A General Curve Fitting Procedure To Aasho Road Test DataDocument25 pagesApplications of A General Curve Fitting Procedure To Aasho Road Test DataBella NovitaNo ratings yet
- Rectangualar Plate With Hole - 2Document3 pagesRectangualar Plate With Hole - 2siddesha K MNo ratings yet
- Numerical Pde HomeworkDocument4 pagesNumerical Pde Homeworkyzfejshjf100% (1)
- Boundary-Value Problems in ElectromagneticsDocument20 pagesBoundary-Value Problems in Electromagneticsdrjonesg19585102No ratings yet
- Adobe Scan 10 Jul 2023 1Document23 pagesAdobe Scan 10 Jul 2023 1RoshanNo ratings yet
- Finite Element MethodDocument37 pagesFinite Element Methodaditya2053No ratings yet
- Thesis On Integro Differential EquationDocument7 pagesThesis On Integro Differential Equationdeniseenriquezglendale100% (2)
- Peeren. Stream Function Approach For Determining Optimal Surface CurrentsDocument17 pagesPeeren. Stream Function Approach For Determining Optimal Surface Currentsra3aqNo ratings yet
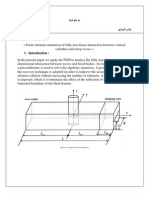
- Finite Element Simulation of Fully Non-Linear Interaction Between Vertical Cylinders and Steep WavesDocument3 pagesFinite Element Simulation of Fully Non-Linear Interaction Between Vertical Cylinders and Steep Wavesyaseromidi67No ratings yet
- Computer Methods in Chemical EngineeringDocument247 pagesComputer Methods in Chemical Engineeringkris010100% (1)
- Hybrid PDFDocument10 pagesHybrid PDFJurij BlaslovNo ratings yet
- Improved TRDocument10 pagesImproved TRVasant PhirkeNo ratings yet
- Numerical Analysis of A Locking-Free Mixed Finite Element Method For A Bending Moment Formulation of Reissner-Mindlin Plate ModelDocument24 pagesNumerical Analysis of A Locking-Free Mixed Finite Element Method For A Bending Moment Formulation of Reissner-Mindlin Plate ModelAugusto De BiassiNo ratings yet
- Some A Posteriori Error Estimators For Elliptic Partial Differential EquationsDocument20 pagesSome A Posteriori Error Estimators For Elliptic Partial Differential EquationsCristhian Paúl Neyra SalvadorNo ratings yet
- Theoretical Analysis of Numerical Integration in Galerkin Meshless MethodsDocument22 pagesTheoretical Analysis of Numerical Integration in Galerkin Meshless MethodsDheeraj_GopalNo ratings yet
- A Finite Volume Method On NURBS Geometries and Its Application in Isogeometric Fluid-Structure InteractionDocument22 pagesA Finite Volume Method On NURBS Geometries and Its Application in Isogeometric Fluid-Structure InteractionbradjenoNo ratings yet
- Coupled Scheme CFDDocument3 pagesCoupled Scheme CFDJorge Cruz CidNo ratings yet
- A Transient Manufactured Solution For The Compressible Navier-Stokes Equations With A Power Law ViscosityDocument16 pagesA Transient Manufactured Solution For The Compressible Navier-Stokes Equations With A Power Law ViscosityRhysUNo ratings yet
- Flash Calculation Stability PDFDocument12 pagesFlash Calculation Stability PDFAndre BecNo ratings yet
- Solution of Continuum Problems in Structural MechanicsDocument3 pagesSolution of Continuum Problems in Structural MechanicsRafique MundeNo ratings yet
- The Partition Method for a Power Series Expansion: Theory and ApplicationsFrom EverandThe Partition Method for a Power Series Expansion: Theory and ApplicationsNo ratings yet
- Mathematical Analysis of Quasi-Simultaneous Laser Welding on PolymersFrom EverandMathematical Analysis of Quasi-Simultaneous Laser Welding on PolymersNo ratings yet
- Concrete Pumping.: Squeeze PumpsDocument2 pagesConcrete Pumping.: Squeeze PumpsALINDA BRIANNo ratings yet
- 2014 - Intelligence As A Predictor of Outcome in Short-And Long-Term PsychotherapyDocument9 pages2014 - Intelligence As A Predictor of Outcome in Short-And Long-Term PsychotherapyZayne CarrickNo ratings yet
- Source:: APJMR-Socio-Economic-Impact-of-Business-Establishments - PDF (Lpubatangas - Edu.ph)Document2 pagesSource:: APJMR-Socio-Economic-Impact-of-Business-Establishments - PDF (Lpubatangas - Edu.ph)Ian EncarnacionNo ratings yet
- Intelligent Status Monitoring System For Port Machinery: RMGC/RTGCDocument2 pagesIntelligent Status Monitoring System For Port Machinery: RMGC/RTGCfatsahNo ratings yet
- Tribes Without RulersDocument25 pagesTribes Without Rulersgulistan.alpaslan8134100% (1)
- I. Choose The Best Option (From A, B, C or D) To Complete Each Sentence: (3.0pts)Document5 pagesI. Choose The Best Option (From A, B, C or D) To Complete Each Sentence: (3.0pts)thmeiz.17sNo ratings yet
- Saflex-Dg - 41 Data SheetDocument5 pagesSaflex-Dg - 41 Data SheetrasheedgotzNo ratings yet
- IJRHAL - Exploring The Journey of Steel Authority of India (SAIL) As A Maharatna CompanyDocument12 pagesIJRHAL - Exploring The Journey of Steel Authority of India (SAIL) As A Maharatna CompanyImpact JournalsNo ratings yet
- Halloween EssayDocument2 pagesHalloween EssayJonathan LamNo ratings yet
- Section 1 Company Overview StandardsDocument34 pagesSection 1 Company Overview StandardsChris MedeirosNo ratings yet
- بتول ماجد سعيد (تقرير السيطرة على تلوث الهواء)Document5 pagesبتول ماجد سعيد (تقرير السيطرة على تلوث الهواء)Batool MagedNo ratings yet
- Consecration of TalismansDocument5 pagesConsecration of Talismansdancinggoat23100% (1)
- Pyramid Type Plate Bending MachineDocument10 pagesPyramid Type Plate Bending MachineAswin JosephNo ratings yet
- How To Install Metal LathDocument2 pagesHow To Install Metal LathKfir BenishtiNo ratings yet
- Spanish Greeting Card Lesson PlanDocument5 pagesSpanish Greeting Card Lesson Planrobert_gentil4528No ratings yet
- Dec 2-7 Week 4 Physics DLLDocument3 pagesDec 2-7 Week 4 Physics DLLRicardo Acosta Subad100% (1)
- Waste Biorefinery Models Towards Sustainable Circular Bioeconomy Critical Review and Future Perspectives2016bioresource Technology PDFDocument11 pagesWaste Biorefinery Models Towards Sustainable Circular Bioeconomy Critical Review and Future Perspectives2016bioresource Technology PDFdatinov100% (1)
- MATM1534 Main Exam 2022 PDFDocument7 pagesMATM1534 Main Exam 2022 PDFGiftNo ratings yet
- SSC Gr8 Biotech Q4 Module 1 WK 1 - v.01-CC-released-09May2021Document22 pagesSSC Gr8 Biotech Q4 Module 1 WK 1 - v.01-CC-released-09May2021Ivy JeanneNo ratings yet
- MATH CIDAM - PRECALCULUS (Midterm)Document4 pagesMATH CIDAM - PRECALCULUS (Midterm)Amy MendiolaNo ratings yet
- Michael Clapis Cylinder BlocksDocument5 pagesMichael Clapis Cylinder Blocksapi-734979884No ratings yet
- ChatGPT & EducationDocument47 pagesChatGPT & EducationAn Lê Trường88% (8)
- Superlab Manual PDFDocument76 pagesSuperlab Manual PDFGabriela Soares100% (1)
- Types of Chemical Reactions: Synthesis and DecompositionDocument3 pagesTypes of Chemical Reactions: Synthesis and DecompositionAlan MartínNo ratings yet
- (Gray Meyer) Analysis and Design of Analog Integrated Circuits 5th CroppedDocument60 pages(Gray Meyer) Analysis and Design of Analog Integrated Circuits 5th CroppedvishalwinsNo ratings yet
- 2.a.1.f v2 Active Matrix (AM) DTMC (Display Technology Milestone Chart)Document1 page2.a.1.f v2 Active Matrix (AM) DTMC (Display Technology Milestone Chart)matwan29No ratings yet
- Pitch DeckDocument21 pagesPitch DeckIANo ratings yet
- Understanding The Contribution of HRM Bundles For Employee Outcomes Across The Life-SpanDocument15 pagesUnderstanding The Contribution of HRM Bundles For Employee Outcomes Across The Life-SpanPhuong NgoNo ratings yet
- Wine TourismDocument9 pagesWine Tourismyarashovanilufar1999No ratings yet
- Abnt NBR 16868 1 Alvenaria Estrutural ProjetoDocument77 pagesAbnt NBR 16868 1 Alvenaria Estrutural ProjetoGIOVANNI BRUNO COELHO DE PAULANo ratings yet