You might also like
- Principios de transferencia de cantidad de movimientoFrom EverandPrincipios de transferencia de cantidad de movimientoNo ratings yet
- Ecuaciones de estado para circuitos secuencialesDocument10 pagesEcuaciones de estado para circuitos secuencialesEdwin GómezNo ratings yet
- Primer Parcial 2020 PDFDocument61 pagesPrimer Parcial 2020 PDFMaxter Dragon100% (1)
- Lista de ..Document33 pagesLista de ..Henrique Scheidt KleinNo ratings yet
- Mapa Conceptual Funcion TransferenciaDocument3 pagesMapa Conceptual Funcion TransferenciaEve Peci0% (1)
- Sistemas Lineales Variables en El Tiempo 1Document5 pagesSistemas Lineales Variables en El Tiempo 1Isaac Valle LunaNo ratings yet
- Introducción A Los Controladores PIDDocument24 pagesIntroducción A Los Controladores PIDVictor ReyesNo ratings yet
- 1 CAPlibroDocument8 pages1 CAPlibroDanny MartínezNo ratings yet
- Orden CeroDocument6 pagesOrden CeroSamuel AruquipaNo ratings yet
- Cuestionario ConvertidoresDocument6 pagesCuestionario ConvertidoresCrsitianNo ratings yet
- Salidas de tres estados: Hi-Z, 1 y 0Document5 pagesSalidas de tres estados: Hi-Z, 1 y 0David SevillaNo ratings yet
- Compensacion Con BodeDocument14 pagesCompensacion Con BodeEve Peci50% (2)
- Sistemas en Tiempo ContinuoDocument34 pagesSistemas en Tiempo ContinuoEl CanoeroNo ratings yet
- Teorema Del Muestreo y El Problema Del Enmascaramiento de SeñalesDocument4 pagesTeorema Del Muestreo y El Problema Del Enmascaramiento de SeñalesJesus Antonio Mtz100% (2)
- EjerDocument38 pagesEjerLuismi TRNo ratings yet
- Probabilidad y Estadistica - Ejercicio1Document6 pagesProbabilidad y Estadistica - Ejercicio1German Felipe TorresNo ratings yet
- Control de motor DC con puente H y PWMDocument12 pagesControl de motor DC con puente H y PWMAdriana AyalaNo ratings yet
- Practicas 7a y 7bDocument10 pagesPracticas 7a y 7buzi bartNo ratings yet
- Investigación sobre diodos comercialesDocument8 pagesInvestigación sobre diodos comercialesJair Tamayo GtzNo ratings yet
- Teorema Del Muestreo y El Problema Del Enmascaramiento de SenalesDocument4 pagesTeorema Del Muestreo y El Problema Del Enmascaramiento de SenalesgerardoNo ratings yet
- Problemario Estabilidad Segúnda ParteDocument18 pagesProblemario Estabilidad Segúnda ParteCarlos Uriel Martinez TinocoNo ratings yet
- Interrupciones PICDocument3 pagesInterrupciones PICLuigi Yaksetig LoayzaNo ratings yet
- Problemas de Maquinas ElectricasDocument5 pagesProblemas de Maquinas ElectricasMiguel AngelNo ratings yet
- Sistemas Lazo Abierto vs CerradoDocument10 pagesSistemas Lazo Abierto vs CerradoJorge Alberto Cardenas MedinaNo ratings yet
- 1.2.3.2 Divisores de Frecuencia y Detectores de Cruce Por Cero Comparadores MicrocontroladoresDocument1 page1.2.3.2 Divisores de Frecuencia y Detectores de Cruce Por Cero Comparadores MicrocontroladoresJorge ADNo ratings yet
- XXX Espacio de EstadosDocument28 pagesXXX Espacio de EstadosRicardo VilchezNo ratings yet
- Historia, Aplicaciones, Ventajas y Desventajas de La NeumaticaDocument3 pagesHistoria, Aplicaciones, Ventajas y Desventajas de La NeumaticaJosua yair Castañeda LariosNo ratings yet
- Unidad 5 CONTROL CLASICODocument36 pagesUnidad 5 CONTROL CLASICOUlises OGNo ratings yet
- Informe Metodos - 1Document20 pagesInforme Metodos - 1Anthony MuñozNo ratings yet
- Taller - Conceptos Basicos de ControlDocument2 pagesTaller - Conceptos Basicos de ControlJoan Manuel Moreno RojasNo ratings yet
- Proyecto de diseño de eje para sistema impulsorDocument36 pagesProyecto de diseño de eje para sistema impulsorDavid FuentessNo ratings yet
- Unidad 5 Control ClasicoDocument24 pagesUnidad 5 Control ClasicoJose AmbrocioNo ratings yet
- El transistor BJT como conmutadorDocument9 pagesEl transistor BJT como conmutadorcarlosNo ratings yet
- Modelado en El Espacio de EstadosDocument3 pagesModelado en El Espacio de EstadosstvanNo ratings yet
- Practica Unidad 4 Electronica de PotenciaDocument15 pagesPractica Unidad 4 Electronica de PotenciaAdriana AyalaNo ratings yet
- 4.3 Flip Flops Rs T D JKDocument3 pages4.3 Flip Flops Rs T D JKG Jean Manuel Alexandroo100% (1)
- Dinamica de Sistemas - Sistemas Hibridos PDFDocument24 pagesDinamica de Sistemas - Sistemas Hibridos PDFEnrike Virrueta100% (1)
- CONTROL Mecat - U3. Análisis y Diseño de Controladores en El TiempoDocument32 pagesCONTROL Mecat - U3. Análisis y Diseño de Controladores en El TiempoDeivid VlNo ratings yet
- Investigacion Unidad 5.Document9 pagesInvestigacion Unidad 5.anon_759688848No ratings yet
- Variables de EstadoDocument49 pagesVariables de EstadoRobertt Stone100% (1)
- Arrays Leds 11x11 LABVIEWDocument11 pagesArrays Leds 11x11 LABVIEWcheNo ratings yet
- HidraulicosDocument4 pagesHidraulicosSantiago QuispeNo ratings yet
- Cinemática de La VibraciónDocument15 pagesCinemática de La VibraciónDaniel González Ortega100% (1)
- Taller 2Document2 pagesTaller 2api-3711530No ratings yet
- Modelos Matemáticos - Circuitos RLCDocument46 pagesModelos Matemáticos - Circuitos RLCMarcos11 GutierrezNo ratings yet
- Simbologia PLCDocument11 pagesSimbologia PLCFernando Delgado RodriguezNo ratings yet
- Introducción Al Control SupervisorioDocument7 pagesIntroducción Al Control Supervisorioalonso_chica0% (1)
- Utilización Del Software de Monitoreo de Análisis de Vibraciones ComoDocument8 pagesUtilización Del Software de Monitoreo de Análisis de Vibraciones ComoNadya Stephanie YánezNo ratings yet
- Introducción A La Modelación de Sistemas ExpoDocument28 pagesIntroducción A La Modelación de Sistemas ExpoMarioNo ratings yet
- Instituto Tecnológico Nacional de México: Síntesis Analítica de MecanismosDocument5 pagesInstituto Tecnológico Nacional de México: Síntesis Analítica de MecanismosOscar EscobedoNo ratings yet
- Respuestas de primer ordenDocument22 pagesRespuestas de primer ordenArlenne Verónica Martínez LealNo ratings yet
- Electrónica de Potencia U5Document10 pagesElectrónica de Potencia U5MarcoLunaRiosNo ratings yet
- Llamas Unidad 2Document12 pagesLlamas Unidad 2Rogelio MolinaNo ratings yet
- Amplificador Restador No InversorDocument4 pagesAmplificador Restador No InversorcheNo ratings yet
- Practica4 ScilabDocument8 pagesPractica4 ScilabEduardo RodriguezNo ratings yet
- Fluidos IncompresiblesDocument6 pagesFluidos IncompresiblesVictor ReyesNo ratings yet
- 1.3 Control Clasico Vs Control ModernoDocument11 pages1.3 Control Clasico Vs Control ModernoAdolfo RaygozaNo ratings yet
- Unidad 3 Maquinas ElectricasDocument19 pagesUnidad 3 Maquinas ElectricasJaime OvillaNo ratings yet
- Capitulo 7Document17 pagesCapitulo 7Kevin Muyón RiveraNo ratings yet
- Error en Estado EstableDocument8 pagesError en Estado EstableJose Alfredo MartinezNo ratings yet
- Cámaras de vigilancia HD 720p para interiores y exterioresDocument5 pagesCámaras de vigilancia HD 720p para interiores y exterioresAlex TipantuñaNo ratings yet
- Consulta 1 Familias LogicasDocument3 pagesConsulta 1 Familias LogicasAlex TipantuñaNo ratings yet
- VlsiDocument2 pagesVlsiAlex TipantuñaNo ratings yet
- Anexo Esforce 2019Document2 pagesAnexo Esforce 2019Ángel OcañaNo ratings yet
- El Valor EstéticoDocument1 pageEl Valor EstéticoAlex TipantuñaNo ratings yet
- Aprendizajes AncestralesDocument1 pageAprendizajes AncestralesAlex TipantuñaNo ratings yet
- Puntajes ReferencialesDocument180 pagesPuntajes ReferencialesYamilet Nieto GómezNo ratings yet
- VHDL 244Document40 pagesVHDL 244Andrés Vanegas GuillénNo ratings yet
- Combinatoria 1235557537Document5 pagesCombinatoria 1235557537Pedro QuispitupacNo ratings yet
- Aprendizajes AncestralesDocument1 pageAprendizajes AncestralesAlex TipantuñaNo ratings yet
- DemenciaDocument15 pagesDemenciaJuan De DiosNo ratings yet
- Tecnica de La Escultura - Tipantuña - AlexDocument1 pageTecnica de La Escultura - Tipantuña - AlexAlex TipantuñaNo ratings yet
- DefinicionDocument15 pagesDefinicionAlex TipantuñaNo ratings yet
- DemenciaDocument15 pagesDemenciaJuan De DiosNo ratings yet
- Guia Rapida ProfinetDocument24 pagesGuia Rapida ProfinetJoaquin Carrasco PinuerNo ratings yet
- Copia de Dgin Ingles Smae19 20190114 Distributivoaplicación 8230809604001548775973Document11 pagesCopia de Dgin Ingles Smae19 20190114 Distributivoaplicación 8230809604001548775973Alex TipantuñaNo ratings yet
- Control PID TipantuñaDocument3 pagesControl PID TipantuñaAlex TipantuñaNo ratings yet
- Cálculo de Alimentador y Circuito DerivadoDocument7 pagesCálculo de Alimentador y Circuito DerivadoAlex Tipantuña100% (2)
- Controladores para SISDocument3 pagesControladores para SISAlex TipantuñaNo ratings yet
- Avance 1Document3 pagesAvance 1Alex TipantuñaNo ratings yet
- Avance 7Document3 pagesAvance 7Alex TipantuñaNo ratings yet
- Control Cascada PlcsDocument4 pagesControl Cascada PlcsAlex TipantuñaNo ratings yet
- La HidraulicaDocument3 pagesLa HidraulicaAlex TipantuñaNo ratings yet
- Compresor de Tornillo - TipantuñaDocument2 pagesCompresor de Tornillo - TipantuñaAlex TipantuñaNo ratings yet
- Tipos y usos de electroválvulasDocument3 pagesTipos y usos de electroválvulasAlex TipantuñaNo ratings yet
- PLC S7-1200Document5 pagesPLC S7-1200Alex Tipantuña100% (1)
- Bitácora 1Document1 pageBitácora 1Alex TipantuñaNo ratings yet
- Módulo EM 235Document8 pagesMódulo EM 235Alex TipantuñaNo ratings yet
- Paper VirtualDocument3 pagesPaper VirtualAlex TipantuñaNo ratings yet
- Informe PLC SemaforoDocument7 pagesInforme PLC SemaforoOrlando Jose HerediaNo ratings yet
- CL - 3 - Mod PAMDocument49 pagesCL - 3 - Mod PAMEduardo RequenaNo ratings yet
- Proformas ClaroDocument7 pagesProformas ClaroAdriana IturraldeNo ratings yet
- B6 Las Energias Renovables InstruccionDocument11 pagesB6 Las Energias Renovables Instruccionjuan carlos rafaelNo ratings yet
- Cálculos en redes eléctricas con las leyes de KirchhoffDocument4 pagesCálculos en redes eléctricas con las leyes de KirchhoffasfsasfNo ratings yet
- Preparatorio 5-Tecnologia Electrica EPNDocument6 pagesPreparatorio 5-Tecnologia Electrica EPNFreddy Daniel ZCNo ratings yet
- Motores Con SpecsDocument11 pagesMotores Con Specsmmartinezr26095836No ratings yet
- 2.-Programacion de PLC BasicoDocument14 pages2.-Programacion de PLC BasicoNelly MartinezNo ratings yet
- Análisis de NodosDocument5 pagesAnálisis de NodosAzael Hernández PelcastreNo ratings yet
- Manual AMCR 5101 - 5102Document14 pagesManual AMCR 5101 - 5102ittg ittgNo ratings yet
- Balasto de emergencia autónomo guía de instalaciónDocument2 pagesBalasto de emergencia autónomo guía de instalaciónedor29No ratings yet
- Proyecto Final MicroondasDocument21 pagesProyecto Final Microondasjavier medinaNo ratings yet
- 1334-2021!05!05-Códigos Nabs, Cnae y Nace Lineas Estratégicas 2021Document11 pages1334-2021!05!05-Códigos Nabs, Cnae y Nace Lineas Estratégicas 2021Yooop NekenNo ratings yet
- Instrumento Taller de Sensibilización I - SSFV UTCH (V2PP)Document17 pagesInstrumento Taller de Sensibilización I - SSFV UTCH (V2PP)luis carlos renteria menaNo ratings yet
- Circuitos 5Document25 pagesCircuitos 5Leticia pardoNo ratings yet
- Factor de CalidadDocument2 pagesFactor de CalidadcarlosNo ratings yet
- Recortador Con DiodoDocument21 pagesRecortador Con DiodoMarco TorresNo ratings yet
- Interruptor: Luis Miguel Ortega Restrepo Sistemas Electricos Medellin Ant 2020Document12 pagesInterruptor: Luis Miguel Ortega Restrepo Sistemas Electricos Medellin Ant 2020Valentina VanegasNo ratings yet
- SDH - BásicoDocument33 pagesSDH - BásicoJuanNo ratings yet
- 11-Diaz Melgarejo Estrella CarolinaDocument13 pages11-Diaz Melgarejo Estrella CarolinaEstrella CarolinqNo ratings yet
- Sistemas de Intrusion EquiposDocument220 pagesSistemas de Intrusion Equiposorlando_arvizuNo ratings yet
- Análisis circuitos ingeniería sistemasDocument7 pagesAnálisis circuitos ingeniería sistemasJuanDa Sotto VNo ratings yet
- Fundamentos Del Estudio de GrabaciónDocument217 pagesFundamentos Del Estudio de GrabaciónAmanda MúsicaNo ratings yet
- Laboratorio N°3Document7 pagesLaboratorio N°3Victor Rolando Tarifa BlancoNo ratings yet
- Calculo de Sfv-AutonomoDocument8 pagesCalculo de Sfv-Autonomojuan carlos tores del0% (1)
- Requisitos técnicos control tensión usuarios AGPE AGGE menor 5 MW GDDocument12 pagesRequisitos técnicos control tensión usuarios AGPE AGGE menor 5 MW GDBryan SaldarriagaNo ratings yet
- Amplificador diferencial: Características y aplicacionesDocument9 pagesAmplificador diferencial: Características y aplicacionesLeonardo CabreraNo ratings yet
- Analisis Respuesta Temporal v3 PDFDocument26 pagesAnalisis Respuesta Temporal v3 PDFLaura CoderchNo ratings yet
- Proyecto Arduino casa inteligenteDocument7 pagesProyecto Arduino casa inteligenteTatiana PerezNo ratings yet
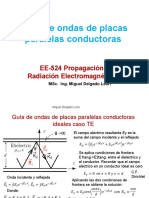
- Guia de Ondas Placas ConductorasDocument5 pagesGuia de Ondas Placas ConductorasAnonymous ACHvOgG5No ratings yet