You might also like
- 337 ch2Document36 pages337 ch2eseemNo ratings yet
- ShearWalls PDFDocument9 pagesShearWalls PDFeseemNo ratings yet
- 337 ch2Document36 pages337 ch2eseemNo ratings yet
- Structural Analysis and Design of Multi-Storeyed Building: Project MembersDocument29 pagesStructural Analysis and Design of Multi-Storeyed Building: Project MembersKem Rai100% (1)
- Etabs Tutorial WallDocument12 pagesEtabs Tutorial WallNono_geotec100% (5)
- Evaluation of Pushover Analysis ProceduresDocument168 pagesEvaluation of Pushover Analysis ProceduresJung Lee83% (6)
- Shear WallsDocument9 pagesShear WallseseemNo ratings yet
- Design of A Steel Roof TrussDocument49 pagesDesign of A Steel Roof TrusseseemNo ratings yet
- Information Technology in Civil EngineeringDocument67 pagesInformation Technology in Civil EngineeringeseemNo ratings yet
- Purlin Design For Roof TrussDocument48 pagesPurlin Design For Roof TrusseseemNo ratings yet
- Model and Analyze Structures Using ETABSDocument28 pagesModel and Analyze Structures Using ETABSHiren Desai100% (1)
- Information Technology in Civil EngineeringDocument67 pagesInformation Technology in Civil EngineeringeseemNo ratings yet
- Lec. 10, ItDocument13 pagesLec. 10, IteseemNo ratings yet
- Member Forces Calculation in Roof TrussDocument30 pagesMember Forces Calculation in Roof Trusseseem100% (1)
- LEC. 11, Construction Using Internet (Final)Document35 pagesLEC. 11, Construction Using Internet (Final)eseemNo ratings yet
- Beam Deflection FormulaeDocument2 pagesBeam Deflection Formulae7575757575100% (6)
- LEC. 11, DatabaseDocument15 pagesLEC. 11, DatabaseeseemNo ratings yet
- Graphical User InterfaceDocument59 pagesGraphical User InterfaceeseemNo ratings yet
- LimeDocument14 pagesLimeeseemNo ratings yet
- Lec. 3Document31 pagesLec. 3eseemNo ratings yet
- IT Applications in Civil Engineering ProjectsDocument22 pagesIT Applications in Civil Engineering ProjectseseemNo ratings yet
- Concrete AggregatesDocument30 pagesConcrete AggregateseseemNo ratings yet
- Limestone PresentationDocument17 pagesLimestone PresentationeseemNo ratings yet
- Curve Fitting and The Method of Least SquaresDocument33 pagesCurve Fitting and The Method of Least SquareseseemNo ratings yet
- Carbonating and Hydraulic Mortars PDFDocument16 pagesCarbonating and Hydraulic Mortars PDFeseemNo ratings yet
- Carbonating and Hydraulic MortarsDocument16 pagesCarbonating and Hydraulic MortarseseemNo ratings yet
- Limestone PresentationDocument17 pagesLimestone PresentationeseemNo ratings yet
- Fresh Concrete Placement TechniquesDocument33 pagesFresh Concrete Placement TechniqueseseemNo ratings yet
- MortarDocument12 pagesMortareseemNo ratings yet
- Lecture1 PortlandCement IntroductionDocument39 pagesLecture1 PortlandCement IntroductioneseemNo ratings yet
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (890)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (399)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (587)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (73)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (265)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2219)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (119)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- A Study On Cohesive Zone ModelDocument19 pagesA Study On Cohesive Zone ModelabishayNo ratings yet
- COMP ENG 4TL4 Digital Signal Processing Lecture NotesDocument12 pagesCOMP ENG 4TL4 Digital Signal Processing Lecture NotesadiazNo ratings yet
- Fatigue and Fracture PDFDocument31 pagesFatigue and Fracture PDFpericharla ravivarmaNo ratings yet
- Rolling Friction CoefficientsDocument3 pagesRolling Friction CoefficientsChypraNo ratings yet
- Behavior of Steel Under TensionDocument6 pagesBehavior of Steel Under TensionAshNo ratings yet
- Chapter 8 - Center of Mass and Linear MomentumDocument21 pagesChapter 8 - Center of Mass and Linear MomentumAnagha GhoshNo ratings yet
- MSDSDocument6 pagesMSDSMAHABEER INDUSTRIESNo ratings yet
- Tugas Ujian FIXDocument3 pagesTugas Ujian FIXNofi RahmayantiNo ratings yet
- Module 3: Buckling of 1D Simply Supported BeamDocument18 pagesModule 3: Buckling of 1D Simply Supported Beamnanduslns07No ratings yet
- Chapter 6 Continuous Probability DistributionsDocument10 pagesChapter 6 Continuous Probability DistributionsAnastasiaNo ratings yet
- Pressure Meter and Dila To MeterDocument34 pagesPressure Meter and Dila To MeterNagarajHB100% (1)
- 1 Warning For Dealing With First FirstDocument3 pages1 Warning For Dealing With First FirstAngel RumboNo ratings yet
- Physics 1401 - Exam 1 Review - Chapter 1,2Document23 pagesPhysics 1401 - Exam 1 Review - Chapter 1,2shoaibNo ratings yet
- GC Validation TCDDocument6 pagesGC Validation TCDRajan Chidambaram SivaNo ratings yet
- Hidroloji UygulamaDocument4 pagesHidroloji Uygulamaİlker YeşilyurtNo ratings yet
- Quad RingDocument32 pagesQuad RingTrelleborgSealsNo ratings yet
- IwnDocument76 pagesIwnAzizur RahmanNo ratings yet
- Motion in A Straight Line: Imp. September - 2012Document3 pagesMotion in A Straight Line: Imp. September - 2012nitin finoldNo ratings yet
- Camera CalibrationDocument39 pagesCamera CalibrationyokeshNo ratings yet
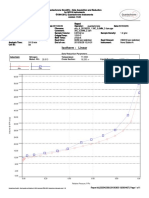
- GraphIsotherm Linear STTN - A - 20150226 - 1 30C - 0,5MM - 3 JamDocument1 pageGraphIsotherm Linear STTN - A - 20150226 - 1 30C - 0,5MM - 3 JamYunus HidayatNo ratings yet
- (Arfken) Mathematical Methods For Physicists 7th SOLUCIONARIO PDFDocument525 pages(Arfken) Mathematical Methods For Physicists 7th SOLUCIONARIO PDFJulian Montero100% (3)
- Surface Engineering NotesDocument17 pagesSurface Engineering NotesRajesh Shah0% (1)
- Seismic Imaging TechnologyDocument3 pagesSeismic Imaging TechnologyrasulbabazadeNo ratings yet
- Quantitative Estimation of Tannins by HPLC: Der Pharmacia Lettre March 2016Document5 pagesQuantitative Estimation of Tannins by HPLC: Der Pharmacia Lettre March 2016kun antaNo ratings yet
- Mathematical Expectation FormulasDocument11 pagesMathematical Expectation FormulasSirfoolNo ratings yet
- Soal-Soal Kel 4Document4 pagesSoal-Soal Kel 4Sayyidati ZuhrohNo ratings yet
- Subsea PLEM & PLET - Theory & Application PDFDocument127 pagesSubsea PLEM & PLET - Theory & Application PDFPaolo BertolliNo ratings yet
- Field Density of Soils by The Core Cutter MethodDocument6 pagesField Density of Soils by The Core Cutter Methodzahari_pmuNo ratings yet
- Jee 2014 - Adv - P (I) Qns&Ans 13Document15 pagesJee 2014 - Adv - P (I) Qns&Ans 13britibanerjeeNo ratings yet
- Abaqus Analysis Intro-Summary PDFDocument20 pagesAbaqus Analysis Intro-Summary PDFHussein ZeinNo ratings yet