You might also like
- Lab 3Document7 pagesLab 3jisteeleNo ratings yet
- Design of Transmission Systems Question Bank - GGDocument27 pagesDesign of Transmission Systems Question Bank - GGR RameshNo ratings yet
- Passive Suspoension Modeling Using Matlab Quarter Car Model Imput Isngal Step TypeDocument6 pagesPassive Suspoension Modeling Using Matlab Quarter Car Model Imput Isngal Step TypeChristian Mavarez0% (2)
- Construction and Manufacture of AutomobilesFrom EverandConstruction and Manufacture of AutomobilesRating: 5 out of 5 stars5/5 (1)
- Working FInal Deliverable DOME5716Document19 pagesWorking FInal Deliverable DOME5716Greg SchellingerNo ratings yet
- Unit 3 (SAMPLE AND SAMPLE DISTRIBUTIONS)Document32 pagesUnit 3 (SAMPLE AND SAMPLE DISTRIBUTIONS)Zara Nabilah100% (2)
- Thermodynamics Level 1: Temperature Scale and Work Done in Different ProcessesDocument7 pagesThermodynamics Level 1: Temperature Scale and Work Done in Different ProcessesViren Patel50% (2)
- 08 CH-6, Fluid Motion Within Combustion ChamberDocument24 pages08 CH-6, Fluid Motion Within Combustion ChamberAhsan AliNo ratings yet
- Toxic Gas DetectorDocument6 pagesToxic Gas DetectorKvakumarv Vallatharasu100% (1)
- Hibernia Study (Flare)Document178 pagesHibernia Study (Flare)bmgarisNo ratings yet
- Articulated Power SteeringDocument57 pagesArticulated Power SteeringDeepak SawantNo ratings yet
- Display Kuhn 5901034-C-En-1214Document106 pagesDisplay Kuhn 5901034-C-En-1214Piri ViruzabNo ratings yet
- High-efficiency energy regenerative shock absorber extends EV rangeDocument41 pagesHigh-efficiency energy regenerative shock absorber extends EV rangePritish KumarNo ratings yet
- Car JackDocument9 pagesCar Jackdeepak GuptaNo ratings yet
- Simulated and Experimental Study of Hydraulic Anti-Lock Braking System Using Sliding-Mode PWM ControlDocument21 pagesSimulated and Experimental Study of Hydraulic Anti-Lock Braking System Using Sliding-Mode PWM ControlLêĐạiHiệpNo ratings yet
- Hovercraft Synopsis by Shivam AggarwalDocument8 pagesHovercraft Synopsis by Shivam Aggarwalshivam agarwalNo ratings yet
- Gas Dynamics LAB 02 PDFDocument16 pagesGas Dynamics LAB 02 PDFmuhammad zia ur rehmanNo ratings yet
- 01 BOOST Release NotesDocument17 pages01 BOOST Release NoteshenevilNo ratings yet
- Computational method for designing wind turbine bladesDocument5 pagesComputational method for designing wind turbine bladesMaurício SoaresNo ratings yet
- Design and Analysis of Brake and Gas PedalDocument5 pagesDesign and Analysis of Brake and Gas PedalIJAERS JOURNAL100% (1)
- IJREI - Vibration Analysis and Response Characteristics of A Half Car Model Subjected To Different Sinusoidal Road ExcitationDocument6 pagesIJREI - Vibration Analysis and Response Characteristics of A Half Car Model Subjected To Different Sinusoidal Road ExcitationIjrei JournalNo ratings yet
- Angle DekkorDocument15 pagesAngle Dekkorarun elshaddaiNo ratings yet
- AT6501 (R-13) Notes PDFDocument131 pagesAT6501 (R-13) Notes PDFAashiq NawinNo ratings yet
- ModeFrontier Short BrochureDocument2 pagesModeFrontier Short BrochureKrozeNo ratings yet
- Screwed Joints Microproject MsbteDocument4 pagesScrewed Joints Microproject MsbteSamarth PatilNo ratings yet
- 4 Bar MechanismsDocument49 pages4 Bar MechanismsFrank SandorNo ratings yet
- Electromagnetic Breaking SystemDocument27 pagesElectromagnetic Breaking SystemRaj KamalNo ratings yet
- Pneumatic Rod Bending Machine Project ReportDocument3 pagesPneumatic Rod Bending Machine Project ReportJeyakumar NNo ratings yet
- R.M.K Engineering College: Me8712-Technical SeminarDocument15 pagesR.M.K Engineering College: Me8712-Technical SeminarPraveenNo ratings yet
- 3 4 Tenneco Globally Rolls Out An Advanced Spend Analytics Solution Powered by HANA Enterprise Cloud HEC Tenneco FlexoDocument20 pages3 4 Tenneco Globally Rolls Out An Advanced Spend Analytics Solution Powered by HANA Enterprise Cloud HEC Tenneco FlexoAndric BelNo ratings yet
- Ansys Software Question Bank For Baja 2014: SL No. Questions AnswersDocument2 pagesAnsys Software Question Bank For Baja 2014: SL No. Questions AnswerspriyeshdongreNo ratings yet
- PV-Wind Hybrid SystemsDocument24 pagesPV-Wind Hybrid SystemssahitNo ratings yet
- Steering Systems: 4.1 Axle-Beam Steering SystemDocument12 pagesSteering Systems: 4.1 Axle-Beam Steering SystemCallGRNo ratings yet
- Development of CNG Injection EngineDocument8 pagesDevelopment of CNG Injection EngineShasahank JoshiNo ratings yet
- Drill Press Function and OperationDocument2 pagesDrill Press Function and OperationJeremiah NayosanNo ratings yet
- H-Beam Assembly and Straightening MachinesDocument5 pagesH-Beam Assembly and Straightening MachinesHo NgocNo ratings yet
- PulleyDocument4 pagesPulleyapi-296329323No ratings yet
- 3.2 Design Parameters and CalculationsDocument9 pages3.2 Design Parameters and CalculationsMasAmirahNo ratings yet
- Designof Power Driven Dough Mixing MachineDocument5 pagesDesignof Power Driven Dough Mixing MachineTewodros B.No ratings yet
- 360 Degree Load CarrierDocument28 pages360 Degree Load CarrierTanviNo ratings yet
- Service Manual A10 & A12 ECDocument5 pagesService Manual A10 & A12 ECLuisNo ratings yet
- Banshee Scythe InfoDocument1 pageBanshee Scythe InfobuilttorideNo ratings yet
- 10 1 1 6Document148 pages10 1 1 6Lky LauNo ratings yet
- MM323 Assignment 2 Report Format - NewDocument21 pagesMM323 Assignment 2 Report Format - NewKelemedi DreuNo ratings yet
- 3 Axis Modern TrailerDocument24 pages3 Axis Modern TrailerRATHANNo ratings yet
- Low Head Hydropower From Wastewater PDFDocument8 pagesLow Head Hydropower From Wastewater PDFमनीष कश्यप100% (1)
- 2014-5-MIller Atkinson Strategy For Future Downsizing (BMEP 29 Bar)Document8 pages2014-5-MIller Atkinson Strategy For Future Downsizing (BMEP 29 Bar)Benedek ZoltánNo ratings yet
- Dmu 60 / 80 / 100 Monoblock Classic Series: CNC Universal Milling MachinesDocument24 pagesDmu 60 / 80 / 100 Monoblock Classic Series: CNC Universal Milling MachinesButch BorjaNo ratings yet
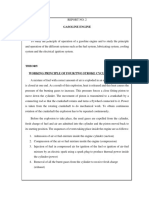
- Gasoline EngineDocument6 pagesGasoline EngineJonan TutaanNo ratings yet
- Articulated Dump TruckDocument2 pagesArticulated Dump TruckFavorSea Industrial Channel Limited100% (1)
- Industrial Diesel Hydraulic Crane: TIL LimitedDocument4 pagesIndustrial Diesel Hydraulic Crane: TIL LimitedNageswara Reddy GajjalaNo ratings yet
- Tutorial Sheet 7Document2 pagesTutorial Sheet 7Muhammad NidzwanNo ratings yet
- Comparing brake performance of EHB and conventional systemsDocument18 pagesComparing brake performance of EHB and conventional systemsprasathramaiah100% (1)
- A Mini Project Report On-1Document28 pagesA Mini Project Report On-1suraj nayakNo ratings yet
- ME450 Winter2009 Final Report - Project 24 - Bicycle Hydraulic Regenerative Braking System PDFDocument107 pagesME450 Winter2009 Final Report - Project 24 - Bicycle Hydraulic Regenerative Braking System PDFKeerthi Tom RajanNo ratings yet
- Connectra 28 HP Butt Fusion MAchineDocument1 pageConnectra 28 HP Butt Fusion MAchineDesli MunarsaNo ratings yet
- Bma4723 Vehicle Dynamics Chap 5Document31 pagesBma4723 Vehicle Dynamics Chap 5Fu HongNo ratings yet
- Design and Development of Mechanical Power AmplifierDocument4 pagesDesign and Development of Mechanical Power AmplifieresatjournalsNo ratings yet
- Pneumatic Bike: A Step To Future: V. Lohit A. Imran MohideenDocument3 pagesPneumatic Bike: A Step To Future: V. Lohit A. Imran MohideenTanviNo ratings yet
- Baba Automobile Training CentreDocument14 pagesBaba Automobile Training CentreRAHUL SAININo ratings yet
- Mts 2 181016092005 PDFDocument129 pagesMts 2 181016092005 PDFAnonymous I7aUWXNo ratings yet
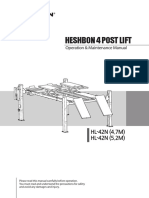
- Heshbon 4 Post Lift: Operation & Maintenance ManualDocument62 pagesHeshbon 4 Post Lift: Operation & Maintenance ManualMed ChetNo ratings yet
- Short ReportDocument2 pagesShort ReportRaj MandloiNo ratings yet
- WheelDocument5 pagesWheeltamilselvan416No ratings yet
- 26 181 GigerDocument6 pages26 181 GigerYouMineNo ratings yet
- MEEN 3250 Design of Machine Elements Greg Schellinger, Section 101 Marquette University 2/11/16Document5 pagesMEEN 3250 Design of Machine Elements Greg Schellinger, Section 101 Marquette University 2/11/16Greg SchellingerNo ratings yet
- Quartus Web Rules FileDocument1 pageQuartus Web Rules FileGreg SchellingerNo ratings yet
- GGGGGDocument4 pagesGGGGGGreg SchellingerNo ratings yet
- PRINT Deliverable 3 Print Out Google DiocDocument21 pagesPRINT Deliverable 3 Print Out Google DiocGreg SchellingerNo ratings yet
- GGGGGDocument4 pagesGGGGGGreg SchellingerNo ratings yet
- PRINT Deliverable 3 Print Out Google DiocDocument21 pagesPRINT Deliverable 3 Print Out Google DiocGreg SchellingerNo ratings yet
- GGGGGDocument4 pagesGGGGGGreg SchellingerNo ratings yet
- GGGGGDocument4 pagesGGGGGGreg SchellingerNo ratings yet
- GGGGGDocument4 pagesGGGGGGreg SchellingerNo ratings yet
- Solar ThermalDocument31 pagesSolar ThermalatulsemiloNo ratings yet
- LYSAGHT Klip Lok Optima Sep 2010Document12 pagesLYSAGHT Klip Lok Optima Sep 2010Ramius HamdaniNo ratings yet
- GE6251 Basic Civil and Mechanical Engineering Regulation 2013 Lecture NotesDocument112 pagesGE6251 Basic Civil and Mechanical Engineering Regulation 2013 Lecture NotesSasi Dharan100% (1)
- Panasonic Dmr-Ex75-Ex85Document85 pagesPanasonic Dmr-Ex75-Ex85videosonNo ratings yet
- Obtaininf Matrix From AnsysDocument17 pagesObtaininf Matrix From AnsysDEEPAKNo ratings yet
- P355NL2 50mmDocument5 pagesP355NL2 50mmslowmosquitoNo ratings yet
- Masterbatches protect plastics from UV damageDocument1 pageMasterbatches protect plastics from UV damageSidharth JainNo ratings yet
- Gases Tutorial 2Document4 pagesGases Tutorial 2Idil WarsameNo ratings yet
- Tetron Spherical Bearing s3'05Document9 pagesTetron Spherical Bearing s3'05nouseph6391No ratings yet
- Magma (Computer Algebra System) - Wikipedia, The Free EncyclopediaDocument3 pagesMagma (Computer Algebra System) - Wikipedia, The Free Encyclopediabeta2009No ratings yet
- Upem Ch-22Document9 pagesUpem Ch-22siddharthsrathor04No ratings yet
- Brightness Color MeterDocument4 pagesBrightness Color MeterkmacleonNo ratings yet
- Kepler's Three Laws of Planetary MotionDocument12 pagesKepler's Three Laws of Planetary MotionAlyssa Rose RamosNo ratings yet
- Monninghoff 546 - DatasheetDocument11 pagesMonninghoff 546 - DatasheetirfannadineNo ratings yet
- Committed To Quality Assurance And Certified In Accordance With DIN EN ISO 9001 08.94Document8 pagesCommitted To Quality Assurance And Certified In Accordance With DIN EN ISO 9001 08.94อุดมเดช ปานเงินNo ratings yet
- Machining Processes SyllabusDocument2 pagesMachining Processes SyllabusshailkhanNo ratings yet
- Infinite Sequences Lecture NotesDocument4 pagesInfinite Sequences Lecture NotesS.m. ChandrashekarNo ratings yet
- William Tell LiteracyDocument29 pagesWilliam Tell LiteracyAndrés Romero SeguraNo ratings yet
- 2A016 Install Rev1972 1965Document40 pages2A016 Install Rev1972 1965Rich McDonaldNo ratings yet
- Anterior Segment OctDocument53 pagesAnterior Segment OctA.c. RaghuNo ratings yet
- Practice FinalDocument26 pagesPractice Finalchaseutd123No ratings yet
- Standing WaveDocument31 pagesStanding WaveJeff GicharuNo ratings yet
- Dokumen - Tips - Cotter Joint PPTX 58f9ab8d3dbc9Document19 pagesDokumen - Tips - Cotter Joint PPTX 58f9ab8d3dbc9Good YagNo ratings yet
- Digital Booklet - Re-AnimatorDocument21 pagesDigital Booklet - Re-AnimatorMoz77No ratings yet
- Preparation, Structure and Morphology of Polymer Supports: David C. SherringtonDocument12 pagesPreparation, Structure and Morphology of Polymer Supports: David C. Sherringtonkishorkumarn8212No ratings yet
- Expt 4-Ionic EquilibriaDocument42 pagesExpt 4-Ionic EquilibriatwinkledreampoppiesNo ratings yet