You might also like
- Proceedings of the Metallurgical Society of the Canadian Institute of Mining and Metallurgy: Proceedings of the International Symposium on Fracture Mechanics, Winnipeg, Canada, August 23-26, 1987From EverandProceedings of the Metallurgical Society of the Canadian Institute of Mining and Metallurgy: Proceedings of the International Symposium on Fracture Mechanics, Winnipeg, Canada, August 23-26, 1987W. R. TysonNo ratings yet
- The Commercial Vehicle: An IntroductionDocument24 pagesThe Commercial Vehicle: An IntroductionPawan Kumar Gupta100% (1)
- GD & T Stack Up Analysis PDFDocument12 pagesGD & T Stack Up Analysis PDFANILNo ratings yet
- A Kinematic Analysis of Meshing Polymer Gear TeethDocument16 pagesA Kinematic Analysis of Meshing Polymer Gear TeethsandeepNo ratings yet
- Analysis of The Yokeless and Segmented Armature MachineDocument7 pagesAnalysis of The Yokeless and Segmented Armature MachineSeksan KhamkaewNo ratings yet
- Numerical Analysis - I. Jacques and C. Judd PDFDocument109 pagesNumerical Analysis - I. Jacques and C. Judd PDFMaria AquiseNo ratings yet
- B89-3-4M R1992 E1985Document47 pagesB89-3-4M R1992 E1985miorNo ratings yet
- M4 Carbine SpecificationDocument56 pagesM4 Carbine SpecificationGary WilliamsNo ratings yet
- Jis G 3466 - 2006 (JP)Document11 pagesJis G 3466 - 2006 (JP)HongHaiDuongNo ratings yet
- Mu Ltiview and Sectional: DrawingsDocument54 pagesMu Ltiview and Sectional: Drawingschaitanya kulkarniNo ratings yet
- Dod STD 100dDocument320 pagesDod STD 100dFlorin NiteNo ratings yet
- MIL Aa 58092Document6 pagesMIL Aa 58092sanjay_aranakeNo ratings yet
- Fatigue strength calculation for steel bars with different surface finishes and loading conditionsDocument40 pagesFatigue strength calculation for steel bars with different surface finishes and loading conditionsJhon Fredy PerezNo ratings yet
- Y14 43Document1 pageY14 43Adrian JoelNo ratings yet
- Manual Servo SGM, SGMP, SgdaDocument429 pagesManual Servo SGM, SGMP, SgdaAndry MisfirNo ratings yet
- A 108 - 03 - Qtewoa - PDFDocument7 pagesA 108 - 03 - Qtewoa - PDFHanifiantoNo ratings yet
- Calculating Bonus TollDocument4 pagesCalculating Bonus TollkarthiblackNo ratings yet
- Full Catalogue HiwinDocument128 pagesFull Catalogue Hiwingraham4877100% (1)
- Sae j577 201509 實驗室跟108 一樣的衝擊測試Document27 pagesSae j577 201509 實驗室跟108 一樣的衝擊測試timNo ratings yet
- GD&TDocument4 pagesGD&Tcarvalho.uk.engNo ratings yet
- Tesi Poligono P3GDocument172 pagesTesi Poligono P3Ger_sor_magaraNo ratings yet
- Screwthread Standards For Federal ServicesDocument12 pagesScrewthread Standards For Federal Servicesikaro181083No ratings yet
- Preview AWS+A2.4 2012Document16 pagesPreview AWS+A2.4 2012Abdul HamidNo ratings yet
- ISO 128-50 2001 (E) - Character PDF Document PDFDocument2 pagesISO 128-50 2001 (E) - Character PDF Document PDFNashraat BukhoryNo ratings yet
- Simulation With 3DEXPERIENCE: Evaluation of Software For Production Flow Simulation in Manufacturing IndustryDocument81 pagesSimulation With 3DEXPERIENCE: Evaluation of Software For Production Flow Simulation in Manufacturing Industryhassan eijyNo ratings yet
- NX 9 For Manufacturing - What's NewDocument9 pagesNX 9 For Manufacturing - What's NewHoang DHNo ratings yet
- Installation Instructions: Lexus LX470 Toyota Landcruiser 87409 75095 44546Document6 pagesInstallation Instructions: Lexus LX470 Toyota Landcruiser 87409 75095 44546Urip S. SetyadjiNo ratings yet
- Source: Https://assist - Dla.mil - Downloaded: 2017-12-05T21:08Z Check The Source To Verify That This Is The Current Version Before UseDocument6 pagesSource: Https://assist - Dla.mil - Downloaded: 2017-12-05T21:08Z Check The Source To Verify That This Is The Current Version Before UseJoey ThomannNo ratings yet
- Accuracy of Frame Side Member TolerancesDocument8 pagesAccuracy of Frame Side Member TolerancesAkmal NizametdinovNo ratings yet
- Fed STD H28 20BDocument30 pagesFed STD H28 20BL FNo ratings yet
- Diseños de EngranajesDocument26 pagesDiseños de EngranajesTarja Turunen MexicoNo ratings yet
- Notice of Cancellation and Replacement of Tee, Bulkhead and Universal Flared Tube StandardDocument36 pagesNotice of Cancellation and Replacement of Tee, Bulkhead and Universal Flared Tube StandardMAI_QualityNo ratings yet
- External Metric ISO Thread Table Chart Sizes M20 - M55Document8 pagesExternal Metric ISO Thread Table Chart Sizes M20 - M55dilipNo ratings yet
- Why Intensity Isn’t Dependent on Exposure TimeDocument1 pageWhy Intensity Isn’t Dependent on Exposure TimeUmit AytarNo ratings yet
- Losses in Gear Box ModellingDocument10 pagesLosses in Gear Box ModellingSiva ReddyNo ratings yet
- Focus Handheld-Inspection User GuideDocument519 pagesFocus Handheld-Inspection User GuideJonnyNo ratings yet
- ASMEY14.5M Geometric Dimensioning and TolerancingDocument239 pagesASMEY14.5M Geometric Dimensioning and TolerancingVicente Pañol VNo ratings yet
- International Standard: Cylindrical Gears For General and Heavy Engineering - Standard Basic Rack Tooth ProfileDocument10 pagesInternational Standard: Cylindrical Gears For General and Heavy Engineering - Standard Basic Rack Tooth ProfileGonzalo_Fernandez84No ratings yet
- NDIA Fundamentals Engineering Drawing PracticesDocument25 pagesNDIA Fundamentals Engineering Drawing PracticesPaul MatquisNo ratings yet
- ASME Y14.36M Surface Texture Symbols PDFDocument14 pagesASME Y14.36M Surface Texture Symbols PDFjmmshah100% (1)
- Mil A 8625FDocument25 pagesMil A 8625FSteveNo ratings yet
- Evaluation of The VDA 238-100 Tight Radius Bending Test Using Digital Image Correlation Strain MeasurementDocument9 pagesEvaluation of The VDA 238-100 Tight Radius Bending Test Using Digital Image Correlation Strain MeasurementR JNo ratings yet
- 6.4 Tooth-Bearings TechnicalData KGSTOCKGEARSDocument3 pages6.4 Tooth-Bearings TechnicalData KGSTOCKGEARSLuis TestaNo ratings yet
- Tesa Micro-Hite: The Quick and Accurate MeasurementDocument32 pagesTesa Micro-Hite: The Quick and Accurate MeasurementEnggCoordNo ratings yet
- Calypso: Filters, Outliers and The Scanning CMMDocument13 pagesCalypso: Filters, Outliers and The Scanning CMMGabriel TelepteanNo ratings yet
- NPTF / PTF Threads: Total Solution For Thread GaugingDocument3 pagesNPTF / PTF Threads: Total Solution For Thread GaugingFatih YükselNo ratings yet
- The 35th Symposium on Shock, Vibration and Associated EnvironmentsDocument332 pagesThe 35th Symposium on Shock, Vibration and Associated Environmentsskr2010No ratings yet
- Finalreport Geardesign Mae4342 MetalgearsolidincDocument23 pagesFinalreport Geardesign Mae4342 Metalgearsolidincapi-542671864No ratings yet
- Tolerance Stackup Analysis 2.0Document6 pagesTolerance Stackup Analysis 2.0Leon WangNo ratings yet
- Flexible Reporting: User'S Manual For Using The Protocoldesigner in Geopak and Cat1000SDocument122 pagesFlexible Reporting: User'S Manual For Using The Protocoldesigner in Geopak and Cat1000Scmm5477No ratings yet
- ASME B1.21M - Metric Screw Threads MJ ProfileDocument68 pagesASME B1.21M - Metric Screw Threads MJ ProfileEnrique SGNo ratings yet
- Guide to Load Analysis for Durability in Vehicle EngineeringFrom EverandGuide to Load Analysis for Durability in Vehicle EngineeringP. JohannessonRating: 4 out of 5 stars4/5 (1)
- Design For Manufacture And Assembly A Complete Guide - 2020 EditionFrom EverandDesign For Manufacture And Assembly A Complete Guide - 2020 EditionNo ratings yet
- Materials Data for Cyclic Loading: Aluminium and Titanium AlloysFrom EverandMaterials Data for Cyclic Loading: Aluminium and Titanium AlloysRating: 1 out of 5 stars1/5 (1)
- TD Operators ManualDocument2 pagesTD Operators ManualDavid PomaNo ratings yet
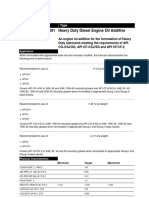
- PDS Lubrizol CV7101 PDFDocument3 pagesPDS Lubrizol CV7101 PDFDavid PomaNo ratings yet
- Brochure HouillonDocument2 pagesBrochure HouillonDavid PomaNo ratings yet
- Viscosidad Tablas de Conversiones - ASTM D2161-05 PDFDocument26 pagesViscosidad Tablas de Conversiones - ASTM D2161-05 PDFEdwin GarzónNo ratings yet
- Overview of Mitsubishi Services: Download All Pages PDFDocument27 pagesOverview of Mitsubishi Services: Download All Pages PDFiswandyNo ratings yet
- Gulf Oil Lub PDFDocument25 pagesGulf Oil Lub PDFDavid Poma100% (2)
- ISO & DIN Specs - Greases - FinalDocument1 pageISO & DIN Specs - Greases - FinalDavid PomaNo ratings yet
- Gulf TEC Plus 10W-40 (06.2012)Document1 pageGulf TEC Plus 10W-40 (06.2012)David PomaNo ratings yet
- Wärtsila App Lube 34 50 SG Data SpecsDocument6 pagesWärtsila App Lube 34 50 SG Data SpecsDavid Poma100% (2)
- Gulf Powertrac 4T Oct16 - 20161005040210Document1 pageGulf Powertrac 4T Oct16 - 20161005040210David PomaNo ratings yet
- TD Operators ManualDocument84 pagesTD Operators Manualsivan_sg1800No ratings yet
- ISO & DIN Specs - Hydraulic - FinalDocument3 pagesISO & DIN Specs - Hydraulic - FinalDavid PomaNo ratings yet
- ISO & DIN Specs - Hydraulic - Final PDFDocument3 pagesISO & DIN Specs - Hydraulic - Final PDFDavid Poma100% (2)
- GLXXNuto H SeriesDocument2 pagesGLXXNuto H SeriesDavid PomaNo ratings yet
- API Spec S Petrol Engine FinalDocument1 pageAPI Spec S Petrol Engine FinalDavid PomaNo ratings yet
- Turbine Oil Oxidation Stability Test PDFDocument2 pagesTurbine Oil Oxidation Stability Test PDFDavid PomaNo ratings yet
- ACEA Specs FinalDocument3 pagesACEA Specs FinalDavid PomaNo ratings yet
- Gulf-Syngear-Fe-75w-80 - 20-Dec-16 - 20161222052228Document1 pageGulf-Syngear-Fe-75w-80 - 20-Dec-16 - 20161222052228David PomaNo ratings yet
- TDS - G-Profi - SGE 40 NAB - All Lubricating Oil For Type 2, 3, 4 and 6 Jenbacher Gas EnginesDocument1 pageTDS - G-Profi - SGE 40 NAB - All Lubricating Oil For Type 2, 3, 4 and 6 Jenbacher Gas EnginesDavid PomaNo ratings yet
- Lube Points in Automobiles - Final PDFDocument1 pageLube Points in Automobiles - Final PDFDavid PomaNo ratings yet
- Lube Points in Automobiles - FinalDocument2 pagesLube Points in Automobiles - FinalDavid PomaNo ratings yet
- Waukesha Sentron LD 500011 1 10Document13 pagesWaukesha Sentron LD 500011 1 10David PomaNo ratings yet
- Bosch Spare Parts Price List 2016Document113 pagesBosch Spare Parts Price List 2016David PomaNo ratings yet
- Lube Points in Automobiles - Final PDFDocument1 pageLube Points in Automobiles - Final PDFDavid PomaNo ratings yet
- 'Documents - MX - Oil Anlaysis Techn For HHP Diesel Enginescummins 2 PDFDocument5 pages'Documents - MX - Oil Anlaysis Techn For HHP Diesel Enginescummins 2 PDFDavid PomaNo ratings yet
- 2013 Chevrolet Captiva Sport Owners PDFDocument374 pages2013 Chevrolet Captiva Sport Owners PDFDavid PomaNo ratings yet
- ISO & DIN Specs - Hydraulic - FinalDocument3 pagesISO & DIN Specs - Hydraulic - FinalDavid Poma100% (1)
- Overview of Mitsubishi Services: Download All Pages PDFDocument27 pagesOverview of Mitsubishi Services: Download All Pages PDFiswandyNo ratings yet
- Iso11500 PDFDocument13 pagesIso11500 PDFDavid PomaNo ratings yet
- Overview of Mitsubishi Services: Download All Pages PDFDocument27 pagesOverview of Mitsubishi Services: Download All Pages PDFiswandyNo ratings yet
- Brigada Eskwela Activities With PicsDocument6 pagesBrigada Eskwela Activities With PicsCharisse TocmoNo ratings yet
- Primary Mathematics Book 5Document87 pagesPrimary Mathematics Book 5joseph kunikina0% (1)
- UCID Number Request FormDocument1 pageUCID Number Request FormOmar AwaleNo ratings yet
- KSB Megaflow V: Pumps For Sewage, Effuents and MisturesDocument18 pagesKSB Megaflow V: Pumps For Sewage, Effuents and MisturesKorneliusNo ratings yet
- DTOcean - Optimal Design Tools For Ocean Energy ArraysDocument94 pagesDTOcean - Optimal Design Tools For Ocean Energy ArraysWilson NevesNo ratings yet
- SE01 SE04 SE03 SE02 E14 E13: As BuiltDocument1 pageSE01 SE04 SE03 SE02 E14 E13: As BuiltgenricNo ratings yet
- Write Like An Academic: Designing An Online Advanced Writing Course For Postgraduate Students and ResearchersDocument9 pagesWrite Like An Academic: Designing An Online Advanced Writing Course For Postgraduate Students and ResearchersLexi TronicsNo ratings yet
- Sources of Release Schedule For Hazardous Area ClassificationDocument1 pageSources of Release Schedule For Hazardous Area ClassificationMachmud Ragil'sNo ratings yet
- Chap1-Geometrical Optics - ExercisesDocument3 pagesChap1-Geometrical Optics - ExercisesReema HlohNo ratings yet
- Method Statement For Cable & TerminationDocument6 pagesMethod Statement For Cable & TerminationRajuNo ratings yet
- Circular Tank Radius CalculationDocument25 pagesCircular Tank Radius CalculationQamar AbbasNo ratings yet
- Recovering Valuable Metals From Recycled Photovoltaic ModulesDocument12 pagesRecovering Valuable Metals From Recycled Photovoltaic ModulesNguyễn TriếtNo ratings yet
- Deutz 1013Document3 pagesDeutz 1013Retno Pudji LestariNo ratings yet
- Artificial Lotus Leaf by NanocastingDocument4 pagesArtificial Lotus Leaf by Nanocastinganon_527700070No ratings yet
- Rc16-17 Etc Sem-IV, May 19Document5 pagesRc16-17 Etc Sem-IV, May 19Prasad KavthakarNo ratings yet
- 0.9PF PW 380v 3phase HF UPS10-120kvaDocument8 pages0.9PF PW 380v 3phase HF UPS10-120kvaArmandinho CaveroNo ratings yet
- L04-L05 Parts 13-25-550 v05 42021Document84 pagesL04-L05 Parts 13-25-550 v05 42021Brandi HillNo ratings yet
- Turkle Sherry What Does Simulation Want PDFDocument11 pagesTurkle Sherry What Does Simulation Want PDFmonterojuNo ratings yet
- A134 PDFDocument4 pagesA134 PDFJarbas MoraesNo ratings yet
- Gpa 2145Document15 pagesGpa 2145Sergio David Ruiz100% (1)
- Shivam Public School: Half Yearly Exam (2019-20) Class-VII Subject - S.S.T Time:3 HoursDocument4 pagesShivam Public School: Half Yearly Exam (2019-20) Class-VII Subject - S.S.T Time:3 HoursSHIVAM TAYALNo ratings yet
- Tech Rider For ShaanDocument7 pagesTech Rider For ShaanSagar Shirole100% (1)
- PET ImagingDocument54 pagesPET ImagingNana AkwaboahNo ratings yet
- Conveyor Chain GuideDocument59 pagesConveyor Chain GuideajaykrishnaaNo ratings yet
- Factors Effecting PerformanceDocument47 pagesFactors Effecting Performancebembie83No ratings yet
- CHEST Workout Structure and Training Log PREVIEWDocument3 pagesCHEST Workout Structure and Training Log PREVIEWgaurav singhNo ratings yet
- Eurox Cross Flow ScrubberDocument8 pagesEurox Cross Flow ScrubberRobin LayogNo ratings yet
- Artikel Jurnal - Fundamental Differences of Transition To Industry 4.0 From Previous Industrial RevolutionsDocument9 pagesArtikel Jurnal - Fundamental Differences of Transition To Industry 4.0 From Previous Industrial RevolutionsJohny DoelNo ratings yet
- Gate Mock Test1Document17 pagesGate Mock Test1Gopinathan SudheerNo ratings yet
- Ref Paper 2Document4 pagesRef Paper 2Subhanjali MyneniNo ratings yet