You might also like
- Understanding Locks Semaphores Latches Mutex and ConditionsDocument6 pagesUnderstanding Locks Semaphores Latches Mutex and Conditionsroberto_pereira_8No ratings yet
- Objective:: King Fahd University of Petroleum and MineralsDocument14 pagesObjective:: King Fahd University of Petroleum and MineralsarabsamaNo ratings yet
- GUI Programming - Java Programming TutorialDocument52 pagesGUI Programming - Java Programming TutorialRanjith M KumarNo ratings yet
- 5 Star Hotels in Portugal Leads 1Document9 pages5 Star Hotels in Portugal Leads 1Zahed IqbalNo ratings yet
- Micron Interview Questions Summary # Question 1 Parsing The HTML WebpagesDocument2 pagesMicron Interview Questions Summary # Question 1 Parsing The HTML WebpagesKartik SharmaNo ratings yet
- Pthreads - MutexesDocument13 pagesPthreads - MutexesRanjith M KumarNo ratings yet
- Experiment 35: Illustration of Thread Management On Windows-Nt AIM: To Write A Program To Illustrate of Thread Management Functions TheoryDocument10 pagesExperiment 35: Illustration of Thread Management On Windows-Nt AIM: To Write A Program To Illustrate of Thread Management Functions TheoryashivaramakrishnaNo ratings yet
- Multi-Core in JAVA/JVM: Concurrency Prior To Java 5: Synchronization and ThreadsDocument14 pagesMulti-Core in JAVA/JVM: Concurrency Prior To Java 5: Synchronization and ThreadsShravan KumarNo ratings yet
- POSIX Thread Libraries:: Important Functions in Pthread LibraryDocument4 pagesPOSIX Thread Libraries:: Important Functions in Pthread LibraryShah ZaibNo ratings yet
- Objective:: Lab # 8 Threads Synchronization (Mutex & Condition Variables)Document10 pagesObjective:: Lab # 8 Threads Synchronization (Mutex & Condition Variables)arabsamaNo ratings yet
- Threads and MultithreadingDocument36 pagesThreads and Multithreadingrajendra kumar . rayalaNo ratings yet
- Ecole Militaire Polytechnique: ContentDocument15 pagesEcole Militaire Polytechnique: ContentTarak KaiNo ratings yet
- 5 MutexDocument2 pages5 MutexAndrew VakulyukNo ratings yet
- ChatGPT Pthread Code Walkthrough Ucontext Implementation and VM Set UpDocument7 pagesChatGPT Pthread Code Walkthrough Ucontext Implementation and VM Set UpAlfred YimNo ratings yet
- Operating Systems Design: © 2020 KL UniversityDocument24 pagesOperating Systems Design: © 2020 KL UniversityAshish ReddyNo ratings yet
- 04 PthreadDocument42 pages04 PthreadHamid KishaNo ratings yet
- Unix ThreadsDocument36 pagesUnix ThreadsAjay Philip SabuNo ratings yet
- Department of Information Technology Assignment No. 2 TITLE: Implement Multithreading For Matrix Multiplication Using Pthreads. ObjectiveDocument6 pagesDepartment of Information Technology Assignment No. 2 TITLE: Implement Multithreading For Matrix Multiplication Using Pthreads. ObjectiveDipali PatilNo ratings yet
- Chapter 6 - Synchronization Tools - Part 2Document32 pagesChapter 6 - Synchronization Tools - Part 2اس اسNo ratings yet
- OS-Lab9-manual 2Document13 pagesOS-Lab9-manual 2Mian AmirNo ratings yet
- Threads LocksDocument23 pagesThreads LocksAkhilesh ChaudhryNo ratings yet
- Thread BasicsDocument20 pagesThread Basicskhoaitayran2012_4950No ratings yet
- Inter Process CommunicationDocument84 pagesInter Process Communicationkapilaryayan2003No ratings yet
- Multithreading in CDocument4 pagesMultithreading in Cmanju754No ratings yet
- Pthreads-Getting Started With Posix ThreadDocument12 pagesPthreads-Getting Started With Posix ThreadAnthony ArielNo ratings yet
- POSIX ThreadsDocument20 pagesPOSIX ThreadsAmir Saman MemaripourNo ratings yet
- 3.distributed Mutual ExclusionDocument2 pages3.distributed Mutual ExclusionShashank GosaviNo ratings yet
- Programming Shared Address Space Platforms: Ananth Grama, Anshul Gupta, George Karypis, and Vipin KumarDocument54 pagesProgramming Shared Address Space Platforms: Ananth Grama, Anshul Gupta, George Karypis, and Vipin KumarIoana SoraNo ratings yet
- Implemention of Mutex Function Using Lpc2378Document6 pagesImplemention of Mutex Function Using Lpc2378imbharteshNo ratings yet
- OS Lab 11 Mutex SemaphoreDocument9 pagesOS Lab 11 Mutex SemaphoreInfinite LoopNo ratings yet
- Posix ApiDocument43 pagesPosix ApiteodoraeneNo ratings yet
- C Threads: Draft of 11 September 1990Document18 pagesC Threads: Draft of 11 September 1990postscriptNo ratings yet
- Threads With Ucontext - Implementation ChatgptDocument8 pagesThreads With Ucontext - Implementation ChatgptAlfred YimNo ratings yet
- 7) Threads: What Is A Thread?Document8 pages7) Threads: What Is A Thread?Avinash LingalooNo ratings yet
- Programming Shared Address Space Platforms: Ananth Grama, Anshul Gupta, George Karypis, and Vipin KumarDocument67 pagesProgramming Shared Address Space Platforms: Ananth Grama, Anshul Gupta, George Karypis, and Vipin KumarshoNo ratings yet
- Programming Shared Address Space PlatformsDocument44 pagesProgramming Shared Address Space PlatformsKIRAN SAVANDENo ratings yet
- Struts2 - MVCDocument19 pagesStruts2 - MVCAnup BurNo ratings yet
- Java TutorialDocument10 pagesJava TutorialLê TuấnNo ratings yet
- DD The Superior College Lahore: Bscs 5CDocument15 pagesDD The Superior College Lahore: Bscs 5CLukeNo ratings yet
- PthreadsDocument13 pagesPthreadsroulaceeNo ratings yet
- Lab Assignment 6-Process SynchronizationDocument7 pagesLab Assignment 6-Process SynchronizationVidit MathurNo ratings yet
- MUTEXDocument2 pagesMUTEXanumay001No ratings yet
- Processes and Threads: Improve Application Responsiveness - Any Program in Which Many Activities Are Not DependentDocument9 pagesProcesses and Threads: Improve Application Responsiveness - Any Program in Which Many Activities Are Not Dependenttowhid_bdNo ratings yet
- Multi-Threaded Programming With POSIX Threads - Linux Systems ProgrammingDocument2,608 pagesMulti-Threaded Programming With POSIX Threads - Linux Systems ProgrammingAlvaro Jimenez FernandezNo ratings yet
- MultithreadingDocument15 pagesMultithreadingYassab AzizNo ratings yet
- CS350 Operating Systems Winter 2006 Assignment One 1 RequirementsDocument3 pagesCS350 Operating Systems Winter 2006 Assignment One 1 RequirementsKiet NguyenNo ratings yet
- Synchronization Via Locking in C++: CS 371P Object-Oriented Programming Lecture-10.fmDocument8 pagesSynchronization Via Locking in C++: CS 371P Object-Oriented Programming Lecture-10.fmmkriiit1No ratings yet
- Pthread PDFDocument33 pagesPthread PDFvineeth sagarNo ratings yet
- Posix ThreadDocument22 pagesPosix ThreadPiyush PandeyNo ratings yet
- Java MultithreadingDocument17 pagesJava MultithreadingIoana Raluca TiriacNo ratings yet
- C++ Tutorial - Multi-Threaded Programming - C++ Class Thread For Pthreads - 2012Document15 pagesC++ Tutorial - Multi-Threaded Programming - C++ Class Thread For Pthreads - 2012David VianaNo ratings yet
- Threads: Name of ManualDocument21 pagesThreads: Name of Manualjatav.narendraNo ratings yet
- Mutex 7Document1 pageMutex 7Kusumanchi AshishNo ratings yet
- Thread BasicsDocument11 pagesThread Basicspraveen4alNo ratings yet
- 6.mutex - Lock GuardDocument2 pages6.mutex - Lock GuardAndrew VakulyukNo ratings yet
- University of Central Punjab: ObjectiveDocument14 pagesUniversity of Central Punjab: ObjectiveInfinite LoopNo ratings yet
- 08 Threads PDFDocument16 pages08 Threads PDFКалоян ТотевNo ratings yet
- 16.3. Thread - Multiple Threads of Control - Python 2.7.18 DocumentationDocument3 pages16.3. Thread - Multiple Threads of Control - Python 2.7.18 Documentationalpha alphaNo ratings yet
- C++ Pthread TutorialDocument26 pagesC++ Pthread TutorialUmar MajeedNo ratings yet
- Pthread Tutorial by Peter (Good One)Document29 pagesPthread Tutorial by Peter (Good One)gunda_venu9856No ratings yet
- MATLAB Machine Learning Recipes: A Problem-Solution ApproachFrom EverandMATLAB Machine Learning Recipes: A Problem-Solution ApproachNo ratings yet
- Artificial Neural Networks with TensorFlow 2: ANN Architecture Machine Learning ProjectsFrom EverandArtificial Neural Networks with TensorFlow 2: ANN Architecture Machine Learning ProjectsNo ratings yet
- TensorFlow 2.x in the Colaboratory Cloud: An Introduction to Deep Learning on Google’s Cloud ServiceFrom EverandTensorFlow 2.x in the Colaboratory Cloud: An Introduction to Deep Learning on Google’s Cloud ServiceNo ratings yet
- Best Reference Books - Computer Science and Engineering - SanfoundryDocument42 pagesBest Reference Books - Computer Science and Engineering - SanfoundryRanjith M KumarNo ratings yet
- Eee646 Fpga-based-system-Design Ela 2.00 Ac29Document2 pagesEee646 Fpga-based-system-Design Ela 2.00 Ac29Ranjith M KumarNo ratings yet
- EEE532 Network-Security TH 1.4 AC37Document1 pageEEE532 Network-Security TH 1.4 AC37Ranjith M KumarNo ratings yet
- Technical Aptitude QuestionsDocument176 pagesTechnical Aptitude QuestionsRanjith M KumarNo ratings yet
- Data Structures IndiaBixDocument3 pagesData Structures IndiaBixRanjith M KumarNo ratings yet
- Virtual Instrumentation Question PaperDocument3 pagesVirtual Instrumentation Question PaperRanjith M Kumar0% (1)
- Programming Methodology in CDocument117 pagesProgramming Methodology in CRanjith M KumarNo ratings yet
- 15 Mes 0060Document17 pages15 Mes 0060Ranjith M KumarNo ratings yet
- Virtual InstrumentationDocument47 pagesVirtual InstrumentationRanjith M KumarNo ratings yet
- Sep14 UnlockedDocument2 pagesSep14 UnlockedRanjith M KumarNo ratings yet
- ARM Lab MannualDocument136 pagesARM Lab MannualRanjith M KumarNo ratings yet
- Ebook - C Programming 4 Embedded Systems - Kirk ZurellDocument191 pagesEbook - C Programming 4 Embedded Systems - Kirk Zurellmanojiitd2363100% (1)
- FSM ExamplesDocument12 pagesFSM ExamplesRanjith M KumarNo ratings yet
- AlgorithmDocument14 pagesAlgorithmRanjith M KumarNo ratings yet
- Probability 1447609405667Document19 pagesProbability 1447609405667Ranjith M KumarNo ratings yet
- Graph TheoryDocument20 pagesGraph TheoryRanjith M KumarNo ratings yet
- Graph TheoryDocument456 pagesGraph TheoryRanjith M Kumar100% (2)
- UNIX and LINUX CommandsDocument79 pagesUNIX and LINUX CommandsRanjith M KumarNo ratings yet
- Mat516 Computational-Techniques TH 1.00 Ac18Document1 pageMat516 Computational-Techniques TH 1.00 Ac18Ranjith M KumarNo ratings yet
- 1.introduction To ProgrammingDocument11 pages1.introduction To ProgrammingRanjith M KumarNo ratings yet
- PitchBook Venture Capital Monthly AugustSeptember 2014Document16 pagesPitchBook Venture Capital Monthly AugustSeptember 2014Ranjith M KumarNo ratings yet
- Unix Indiabix File Management: 1. How Are Devices Represented in Unix?Document11 pagesUnix Indiabix File Management: 1. How Are Devices Represented in Unix?Ranjith M KumarNo ratings yet
- The Floating-Point Guide - Floating-Point Cheat Sheet For JavaDocument2 pagesThe Floating-Point Guide - Floating-Point Cheat Sheet For JavaRanjith M KumarNo ratings yet
- 2.basics of C++: - Ranjith KumarDocument11 pages2.basics of C++: - Ranjith KumarRanjith M KumarNo ratings yet
- Character Device DriverDocument8 pagesCharacter Device DriverRanjith M Kumar100% (1)
- The 5 Basics To Know Before You Work On Raspberry Pi!Document4 pagesThe 5 Basics To Know Before You Work On Raspberry Pi!Ranjith M KumarNo ratings yet
- 5 Deming Principles That Help Healthcare Process ImprovementDocument8 pages5 Deming Principles That Help Healthcare Process Improvementdewi estariNo ratings yet
- How Yaffs WorksDocument25 pagesHow Yaffs WorkseemkutayNo ratings yet
- CS321 Computer ArchitectureDocument160 pagesCS321 Computer ArchitectureAnurag kumarNo ratings yet
- 18PGHR11 - MDI - Aditya JainDocument4 pages18PGHR11 - MDI - Aditya JainSamanway BhowmikNo ratings yet
- Basic DfwmacDocument6 pagesBasic DfwmacDinesh Kumar PNo ratings yet
- 4109 CPC For ExamDocument380 pages4109 CPC For ExamMMM-2012No ratings yet
- Draft Contract Agreement 08032018Document6 pagesDraft Contract Agreement 08032018Xylo SolisNo ratings yet
- PFI High Flow Series Single Cartridge Filter Housing For CleaningDocument2 pagesPFI High Flow Series Single Cartridge Filter Housing For Cleaningbennypartono407No ratings yet
- My CoursesDocument108 pagesMy Coursesgyaniprasad49No ratings yet
- United Nations Economic and Social CouncilDocument3 pagesUnited Nations Economic and Social CouncilLuke SmithNo ratings yet
- Lab 6 PicoblazeDocument6 pagesLab 6 PicoblazeMadalin NeaguNo ratings yet
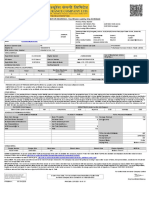
- MOTOR INSURANCE - Two Wheeler Liability Only SCHEDULEDocument1 pageMOTOR INSURANCE - Two Wheeler Liability Only SCHEDULESuhail V VNo ratings yet
- 1 PBDocument14 pages1 PBSaepul HayatNo ratings yet
- HandloomDocument4 pagesHandloomRahulNo ratings yet
- CIR Vs PAL - ConstructionDocument8 pagesCIR Vs PAL - ConstructionEvan NervezaNo ratings yet
- MSDS - Tuff-Krete HD - Part DDocument6 pagesMSDS - Tuff-Krete HD - Part DAl GuinitaranNo ratings yet
- BMA Recital Hall Booking FormDocument2 pagesBMA Recital Hall Booking FormPaul Michael BakerNo ratings yet
- Discover Mecosta 2011Document40 pagesDiscover Mecosta 2011Pioneer GroupNo ratings yet
- CI Principles of EconomicsDocument833 pagesCI Principles of EconomicsJamieNo ratings yet
- 48 Volt Battery ChargerDocument5 pages48 Volt Battery ChargerpradeeepgargNo ratings yet
- Agfa CR 85-X: Specification Fuji FCR Xg5000 Kodak CR 975Document3 pagesAgfa CR 85-X: Specification Fuji FCR Xg5000 Kodak CR 975Youness Ben TibariNo ratings yet
- TSR KuDocument16 pagesTSR KuAngsaNo ratings yet
- Peoria County Jail Booking Sheet For Oct. 7, 2016Document6 pagesPeoria County Jail Booking Sheet For Oct. 7, 2016Journal Star police documents50% (2)
- Maths PDFDocument3 pagesMaths PDFChristina HemsworthNo ratings yet
- Evaluating Project Scheduling and Due Assignment Procedures An Experimental AnalysisDocument19 pagesEvaluating Project Scheduling and Due Assignment Procedures An Experimental AnalysisJunior Adan Enriquez CabezudoNo ratings yet
- 23 Things You Should Know About Excel Pivot Tables - Exceljet PDFDocument21 pages23 Things You Should Know About Excel Pivot Tables - Exceljet PDFRishavKrishna0% (1)
- TLE - IA - Carpentry Grades 7-10 CG 04.06.2014Document14 pagesTLE - IA - Carpentry Grades 7-10 CG 04.06.2014RickyJeciel100% (2)
- Reflections On Free MarketDocument394 pagesReflections On Free MarketGRK MurtyNo ratings yet