You might also like
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- smts-2 Theory of Structures by B.C. Punmia Text PDFDocument497 pagessmts-2 Theory of Structures by B.C. Punmia Text PDFAman Dubey100% (1)
- Frpsdulqj GHQVLW - Iruhfdvwv Yld ZHLJKWHG Olnholkrrg Udwlr WHVWV DV - PSWRWLF DQG Errwvwuds PHWKRGVDocument37 pagesFrpsdulqj GHQVLW - Iruhfdvwv Yld ZHLJKWHG Olnholkrrg Udwlr WHVWV DV - PSWRWLF DQG Errwvwuds PHWKRGVTamara KnoxNo ratings yet
- 1 9781611974522 BMDocument7 pages1 9781611974522 BMTamara KnoxNo ratings yet
- Twodof Base Disp Modal RevADocument11 pagesTwodof Base Disp Modal RevATamara KnoxNo ratings yet
- Modal Analysis SpreadsheetDocument13 pagesModal Analysis Spreadsheettanha56313955No ratings yet
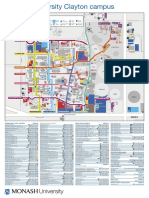
- 3 ClaytoncolourDocument1 page3 ClaytoncolourTamara KnoxNo ratings yet
- Iast Lect19Document9 pagesIast Lect19Sachin SilmanaNo ratings yet
- ASCE LaTex User Guide 5.24.2016Document1 pageASCE LaTex User Guide 5.24.2016Tamara KnoxNo ratings yet
- Condeck HP Composite Decking Product Technical ManualDocument48 pagesCondeck HP Composite Decking Product Technical ManualTamara KnoxNo ratings yet
- Site Specific Wave Parameters For Texas Coastal Bridges: Final ReportDocument124 pagesSite Specific Wave Parameters For Texas Coastal Bridges: Final ReportTamara KnoxNo ratings yet
- LongitudinalDocument20 pagesLongitudinalTamara KnoxNo ratings yet
- Design Rating Rail Bridge Majedski 00006Document25 pagesDesign Rating Rail Bridge Majedski 00006rkgcrriNo ratings yet
- Matrx Stiffness MethodDocument34 pagesMatrx Stiffness MethodArviSanNo ratings yet
- Laplace PDFDocument13 pagesLaplace PDFTamara KnoxNo ratings yet
- Extreme Value TheoryDocument2 pagesExtreme Value TheoryTamara KnoxNo ratings yet
- PVW Intro PDFDocument7 pagesPVW Intro PDFTamara KnoxNo ratings yet
- Civ L 436 Virtual WorkDocument4 pagesCiv L 436 Virtual WorkTamara KnoxNo ratings yet
- Examples Paper 4 SOLUTIONSDocument10 pagesExamples Paper 4 SOLUTIONSTamara KnoxNo ratings yet
- Virt WRKDocument8 pagesVirt WRKJason MakNo ratings yet
- Column SizingDocument6 pagesColumn SizingTamara KnoxNo ratings yet
- Examples Paper 4Document4 pagesExamples Paper 4Tamara KnoxNo ratings yet
- Civ L 436 Notes On BeamsDocument8 pagesCiv L 436 Notes On BeamsTamara KnoxNo ratings yet
- Column SizingDocument6 pagesColumn SizingTamara KnoxNo ratings yet
- Monitoring As Aid To Bridge ManagementDocument21 pagesMonitoring As Aid To Bridge ManagementTamara KnoxNo ratings yet
- Shakedown Algorithm PDFDocument32 pagesShakedown Algorithm PDFTamara KnoxNo ratings yet
- 1031 - Slice Forces and Moments in SolidsDocument12 pages1031 - Slice Forces and Moments in SolidsTamara KnoxNo ratings yet
- Project III Notes 1011Document218 pagesProject III Notes 1011Tamara KnoxNo ratings yet
- 109 - BRIDGE Deck Behaviour Austroads04Document12 pages109 - BRIDGE Deck Behaviour Austroads04Tamara KnoxNo ratings yet
- Instructors Solutions ManualDocument1,010 pagesInstructors Solutions ManualTamara Knox100% (1)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (895)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (400)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (588)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (121)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- Stars and Solar System McqsDocument4 pagesStars and Solar System McqsDev RajuNo ratings yet
- Observer-Based Super Twisting Sliding Mode Control For Fixed Wing Unmanned Aerial VehicleDocument6 pagesObserver-Based Super Twisting Sliding Mode Control For Fixed Wing Unmanned Aerial VehiclemailtosshettyNo ratings yet
- Power Electronics Course OutlineDocument2 pagesPower Electronics Course OutlineTareq AzizNo ratings yet
- Soil Vane Shear Test Report NewDocument5 pagesSoil Vane Shear Test Report Newfuadfazrin060592100% (6)
- HVD-10 50MP ApDocument4 pagesHVD-10 50MP Apdinhhai1613No ratings yet
- Jesper Andreasen Local VolatilityDocument55 pagesJesper Andreasen Local VolatilityAL RAFI0% (1)
- Phenolphthalein NaOH KineticsDocument7 pagesPhenolphthalein NaOH KineticsjoevinngglNo ratings yet
- Venusian Health Magic - Michael X Barton (1959)Document62 pagesVenusian Health Magic - Michael X Barton (1959)Homers Simpson100% (34)
- Geometric Sequences & SeriesDocument6 pagesGeometric Sequences & SerieswolfretonmathsNo ratings yet
- Photometric SystemsDocument46 pagesPhotometric SystemsCaioPaesNo ratings yet
- The Principles of Exercise Therapy TextDocument306 pagesThe Principles of Exercise Therapy TextVivian Nehal50% (2)
- Thermionic Emission: PurposesDocument3 pagesThermionic Emission: Purposeskumar.arasu8717No ratings yet
- NCIT MCQDocument3 pagesNCIT MCQyogesh deoNo ratings yet
- Lateral Torsional Buckling of Steel BeamsDocument8 pagesLateral Torsional Buckling of Steel BeamsapirakqNo ratings yet
- P Malan AIAA2009 Gamma Re ThetaDocument14 pagesP Malan AIAA2009 Gamma Re ThetaMohammed BarahmehNo ratings yet
- Pre-Strain Effect of On Fracture Performance of High-Strength Steel WeldsDocument7 pagesPre-Strain Effect of On Fracture Performance of High-Strength Steel WeldsThiago Amaro RodriguesNo ratings yet
- Anshuman ProjectDocument4 pagesAnshuman ProjectShivani DahiyaNo ratings yet
- L1 Piles Subject To Lateral Soil MovementDocument32 pagesL1 Piles Subject To Lateral Soil Movementedward the iiiNo ratings yet
- Mathematical Model of Inverted Pendulum SystemDocument18 pagesMathematical Model of Inverted Pendulum SystemMajid Mehmood100% (1)
- GATE 2014 Civil Engineering Keys & Solution (Evening Session)Document36 pagesGATE 2014 Civil Engineering Keys & Solution (Evening Session)Lokesh Kumar100% (1)
- BATD369 - Corrosion Management SystemDocument5 pagesBATD369 - Corrosion Management SystemFlorian COUTURIER100% (1)
- Pressure Measurement: by N. AsyiddinDocument29 pagesPressure Measurement: by N. AsyiddinrajimuruganNo ratings yet
- Daniel Keys Moran - The RingDocument361 pagesDaniel Keys Moran - The Ring7eld8No ratings yet
- Group Theory and Its Application To Chemistry - ChemWikiDocument13 pagesGroup Theory and Its Application To Chemistry - ChemWikieasy99No ratings yet
- Riemannian Curvature: 1 Parallel Transport Around A Small Closed LoopDocument7 pagesRiemannian Curvature: 1 Parallel Transport Around A Small Closed LoopdheerajkmishraNo ratings yet
- Trigonometric Leveling - Heights and Distances Problem (Two Exercises)Document1 pageTrigonometric Leveling - Heights and Distances Problem (Two Exercises)RadhaAnanthalekshmiNo ratings yet
- Problemario B.E. Segundo ParcialDocument4 pagesProblemario B.E. Segundo ParcialjorgeNo ratings yet
- Manual de Conchas o Casquetes PDFDocument180 pagesManual de Conchas o Casquetes PDFJuan Carlos CamachoNo ratings yet
- Printing - Obtaining and Assigning Beam Cross-Section Properties Using HyperBeam - HM-3020Document14 pagesPrinting - Obtaining and Assigning Beam Cross-Section Properties Using HyperBeam - HM-3020api-19817003No ratings yet
- SPEC Carbopol 940Document1 pageSPEC Carbopol 940Juan Flores OlguinNo ratings yet