You might also like
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (588)
- Resistance and Propulsion of Ships G KuiperDocument367 pagesResistance and Propulsion of Ships G KuiperGoutam Kumar SahaNo ratings yet
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- A Method of Calculation of Ship Resistance On Calm Water Useful at Preliminary Stages of Ship DesignDocument6 pagesA Method of Calculation of Ship Resistance On Calm Water Useful at Preliminary Stages of Ship DesignGoutam Kumar Saha100% (1)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5795)
- Ship-Theory Propulsion 1Document29 pagesShip-Theory Propulsion 1Goutam Kumar SahaNo ratings yet
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Resistance and Powering Prediction For Transom Stern Hull Forms During Early Stage Ship Design S C FungDocument56 pagesResistance and Powering Prediction For Transom Stern Hull Forms During Early Stage Ship Design S C FungGoutam Kumar Saha100% (4)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (895)
- Load Shear BM CurvesDocument6 pagesLoad Shear BM CurvesGoutam Kumar SahaNo ratings yet
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (345)
- Resistance of A Systematic Series of Semiplaning Transom Stern Hulls Roger H ComptonDocument26 pagesResistance of A Systematic Series of Semiplaning Transom Stern Hulls Roger H ComptonGoutam Kumar SahaNo ratings yet
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- Fundamentals of Ship Design Economics - Harry BenfordDocument64 pagesFundamentals of Ship Design Economics - Harry BenfordGoutam Kumar SahaNo ratings yet
- Study of Michell's Integral and Influence of Viscosity and Ship Hull Form On Wave ResistanceDocument42 pagesStudy of Michell's Integral and Influence of Viscosity and Ship Hull Form On Wave ResistanceGoutam Kumar SahaNo ratings yet
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (400)
- 136365.1 Particularities of Navigation On Inland WaterwaysDocument12 pages136365.1 Particularities of Navigation On Inland WaterwaysGoutam Kumar SahaNo ratings yet
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Study of Bollard Pull Harbour Tug: Focuses On Stability and Straight MovementDocument14 pagesStudy of Bollard Pull Harbour Tug: Focuses On Stability and Straight MovementGoutam Kumar SahaNo ratings yet
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Panel MethodsDocument94 pagesPanel MethodsGoutam Kumar SahaNo ratings yet
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- Some Ship Design MethodsDocument24 pagesSome Ship Design MethodsSilvio MeloNo ratings yet
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- Extrapolation of Propulsion Tests For Ships With Appendages and Complex PropulsorDocument13 pagesExtrapolation of Propulsion Tests For Ships With Appendages and Complex PropulsorGoutam Kumar SahaNo ratings yet
- Calculation of Marine Propeller by DNVDocument14 pagesCalculation of Marine Propeller by DNVbhukthaNo ratings yet
- A Power Prediction Method and Its Application To Small Ships.Document19 pagesA Power Prediction Method and Its Application To Small Ships.Goutam Kumar SahaNo ratings yet
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- Advanced Marine Surface CraftDocument21 pagesAdvanced Marine Surface CraftGoutam Kumar SahaNo ratings yet
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- Modelling and Simulation of Marine Power and Propulsion SystemsDocument103 pagesModelling and Simulation of Marine Power and Propulsion SystemsGoutam Kumar SahaNo ratings yet
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- Lecture Boundary Element Methods in AerodynamicsDocument93 pagesLecture Boundary Element Methods in AerodynamicsGoutam Kumar SahaNo ratings yet
- Structural StrengthDocument181 pagesStructural StrengthGoutam Kumar Saha100% (1)
- Factors Affecting Ship ResistanceDocument33 pagesFactors Affecting Ship ResistanceGoutam Kumar Saha100% (1)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- Shallow Water Effect On Ship ResistanceDocument30 pagesShallow Water Effect On Ship ResistanceGoutam Kumar Saha100% (5)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1091)
- Lecture Notes of Ship Manoeuvring and Sea Keeping 20060615 - New (By Candle Wind)Document64 pagesLecture Notes of Ship Manoeuvring and Sea Keeping 20060615 - New (By Candle Wind)Goutam Kumar Saha100% (3)
- Dredger Design PDFDocument97 pagesDredger Design PDFshimul200883% (6)
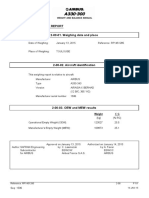
- MD 82Document9 pagesMD 82guigaselNo ratings yet
- Recurrent & Refresher Question Bank For Cabin CrewDocument31 pagesRecurrent & Refresher Question Bank For Cabin CrewMarkXI MarkXINo ratings yet
- P3 Turning Forces QuestionsDocument26 pagesP3 Turning Forces Questionsaby251188No ratings yet
- Part List For REZNORDocument8 pagesPart List For REZNORaerogem618No ratings yet
- BELL412 SeriesDocument12 pagesBELL412 SeriesmurtazaNo ratings yet
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (121)
- CHPL ATPL SyullabusDocument157 pagesCHPL ATPL SyullabusNiraj MishraNo ratings yet
- Bearing Load Calculation: - H DP - N - H DP N KDocument19 pagesBearing Load Calculation: - H DP - N - H DP N KWindy LusiaNo ratings yet
- Virtual Testing of A Composite Cylindrical Lattice StructureDocument1 pageVirtual Testing of A Composite Cylindrical Lattice StructureSiva BhaskarNo ratings yet
- Denel Dynamics Product Brochure PDFDocument36 pagesDenel Dynamics Product Brochure PDFeggboy196967% (3)
- LO AD 2 LOWW 9-2-1 enDocument8 pagesLO AD 2 LOWW 9-2-1 enjoseph.mangan1892No ratings yet
- Complete The Sentences With The Correct Modal Verbs: 1Document2 pagesComplete The Sentences With The Correct Modal Verbs: 1Sthefany Godoy CaquiNo ratings yet
- Orion ExploreFarther-mediakit PDFDocument37 pagesOrion ExploreFarther-mediakit PDFajrespinaNo ratings yet
- International CanSat Workshop - Program and AbstractsDocument30 pagesInternational CanSat Workshop - Program and AbstractsjjaavvmmNo ratings yet
- Project Dyna Soar General Management Proposal System 464LDocument125 pagesProject Dyna Soar General Management Proposal System 464LBob AndrepontNo ratings yet
- Aircraft Weighing Report 2.00: Weight CGDocument30 pagesAircraft Weighing Report 2.00: Weight CGEdwar ZulmiNo ratings yet
- 400e 2MDocument4 pages400e 2MVincent CardenasNo ratings yet
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- Colgren Loschke Lockheed Tailless AircraftDocument9 pagesColgren Loschke Lockheed Tailless Aircraftbring it on100% (1)
- Runway Visual Range FAADocument10 pagesRunway Visual Range FAAHelloWorldNo ratings yet
- Double-Ended Ferries - Propulsive Performance Challenges and ModelDocument8 pagesDouble-Ended Ferries - Propulsive Performance Challenges and ModelAnderson100% (1)
- 1 D Motion ProblemsDocument3 pages1 D Motion ProblemsAbhay GargNo ratings yet
- An INS Monitor Against GNSS Spoofing Attacks During GBAS and SBAS-Assisted Aircraft Landing Approaches Tanil - Gnss - 16Document10 pagesAn INS Monitor Against GNSS Spoofing Attacks During GBAS and SBAS-Assisted Aircraft Landing Approaches Tanil - Gnss - 16FabrizioToniNo ratings yet
- : Активная лексика Engine Malfunctions Key Words Extra Vocabulary Example SentencesDocument2 pages: Активная лексика Engine Malfunctions Key Words Extra Vocabulary Example SentencesAviation WithvoiceNo ratings yet
- Ars ReproduccionDocument40 pagesArs ReproduccionCarlos Villarreal GiraldoNo ratings yet
- Kaplan Design Marko KogovsekDocument10 pagesKaplan Design Marko KogovsekIvan Batistic BeloNo ratings yet
- MIG Ammo Catalogue 2016Document99 pagesMIG Ammo Catalogue 2016davorp1402100% (2)
- NOTAM Back To BasicsDocument1 pageNOTAM Back To BasicsAshish RanaNo ratings yet
- FAA Memo On Media Use of FAADocument2 pagesFAA Memo On Media Use of FAAMatthew McQuiston SchroyerNo ratings yet
- CRJ-200 FTD Training Course OutlineDocument16 pagesCRJ-200 FTD Training Course OutlineHighspeed FlyboyNo ratings yet
- L-05 Critical Activities Anp-2Document11 pagesL-05 Critical Activities Anp-2SamNo ratings yet
- P-51D EscortDocument39 pagesP-51D Escortavialogs100% (3)
- The Things We Make: The Unknown History of Invention from Cathedrals to Soda Cans (Father's Day Gift for Science and Engineering Curious Dads)From EverandThe Things We Make: The Unknown History of Invention from Cathedrals to Soda Cans (Father's Day Gift for Science and Engineering Curious Dads)No ratings yet
- The Things We Make: The Unknown History of Invention from Cathedrals to Soda CansFrom EverandThe Things We Make: The Unknown History of Invention from Cathedrals to Soda CansRating: 4.5 out of 5 stars4.5/5 (21)
- To Engineer Is Human: The Role of Failure in Successful DesignFrom EverandTo Engineer Is Human: The Role of Failure in Successful DesignRating: 4 out of 5 stars4/5 (138)