You might also like
- Review 1Document8 pagesReview 1Lyka Jane Pesigan100% (1)
- 4 Flexural Members PDFDocument9 pages4 Flexural Members PDFCristan RetuermaNo ratings yet
- Drill 1Document4 pagesDrill 1Ela MacabanteNo ratings yet
- Topic 8 - Load PatternDocument11 pagesTopic 8 - Load PatternKenny Cantila100% (1)
- Preboard2 Psad Situation 2 Pile FootingDocument1 pagePreboard2 Psad Situation 2 Pile FootingAngelice Alliah De la CruzNo ratings yet
- Structural Analysis Formula SheetDocument2 pagesStructural Analysis Formula SheetKhalidNo ratings yet
- Friction ProblemsDocument4 pagesFriction ProblemsDaniel PerezNo ratings yet
- Cengr 520 - Steel Design & Cengr3220 - Timber & Steel Design - 03192021 - 1Document9 pagesCengr 520 - Steel Design & Cengr3220 - Timber & Steel Design - 03192021 - 1Benjamin EngelNo ratings yet
- Unit 2 Influence Lines Statically Determinate Trusses: StructureDocument24 pagesUnit 2 Influence Lines Statically Determinate Trusses: StructureRaj BakhtaniNo ratings yet
- Moren - MODULE 3 - Beams-ColumnDocument18 pagesMoren - MODULE 3 - Beams-ColumnJoshua Espanto MorenNo ratings yet
- Shear Lag FactorDocument12 pagesShear Lag FactorLarissa RiveraNo ratings yet
- Quiz 12Document6 pagesQuiz 12John Taylor BernasNo ratings yet
- Maximum Stresses On A Pole Subjected To Combined LoadingsDocument2 pagesMaximum Stresses On A Pole Subjected To Combined LoadingsShiela GonzalesNo ratings yet
- Plate No.6 - SolutionDocument6 pagesPlate No.6 - SolutionBillie Ian. Salamante JrNo ratings yet
- Problem 11: Sat S WDocument3 pagesProblem 11: Sat S WRebecca BernardoNo ratings yet
- Math Samples PDFDocument1 pageMath Samples PDFArwin VillegasNo ratings yet
- Title: Properties of Steel Self Learning Assessment (Problem Set)Document14 pagesTitle: Properties of Steel Self Learning Assessment (Problem Set)Migaea AndresNo ratings yet
- Module1 IntroductionDocument13 pagesModule1 Introductionmarlo ignacioNo ratings yet
- PDF 7 Mechanics of DBDocument11 pagesPDF 7 Mechanics of DBRizette Palogan100% (1)
- Forces On Curved Surfaces 1Document13 pagesForces On Curved Surfaces 1Yours PamoreNo ratings yet
- RCD ShearDocument6 pagesRCD ShearGerald CatiponNo ratings yet
- UntitledDocument19 pagesUntitledRojane FloraNo ratings yet
- RCD SA4 GuideDocument15 pagesRCD SA4 GuideDionne Rhenzo MontalesNo ratings yet
- Steel Design Problem SetxzDocument35 pagesSteel Design Problem SetxzMiah N. PascualNo ratings yet
- Statistics: Measure of Central Tendency MeanDocument25 pagesStatistics: Measure of Central Tendency MeanjlNo ratings yet
- Tos 2Document3 pagesTos 2Allyanna Elise DiamNo ratings yet
- Tsu m22 Practice Problems Steel DesignDocument3 pagesTsu m22 Practice Problems Steel DesignMark Lester Valdoz100% (1)
- 9-Plastic Centroid-Nscp2015Document15 pages9-Plastic Centroid-Nscp2015Sheenah TelanNo ratings yet
- Mastery Test MT1 and MT2 Solution: None of TheseDocument6 pagesMastery Test MT1 and MT2 Solution: None of TheseU-line Anne Roque VillafloresNo ratings yet
- Inhouse Practice Problems - RCD-Column - Without AnswersDocument1 pageInhouse Practice Problems - RCD-Column - Without AnswersAndrea Sochayseng SolijonNo ratings yet
- Ans. 501,438.32 MDocument2 pagesAns. 501,438.32 Maljon jamesNo ratings yet
- Columns and Other Compression Member - SteelDocument120 pagesColumns and Other Compression Member - SteelCharizza Montarin CENo ratings yet
- Kippap-Handout-Evaluation Exam 5Document6 pagesKippap-Handout-Evaluation Exam 5Michael MercadoNo ratings yet
- Hydro HyrdoDocument16 pagesHydro HyrdoCherie Gold AccuhNo ratings yet
- Design and Analysis For ShearDocument20 pagesDesign and Analysis For Shearhonesto reynaNo ratings yet
- ProblemsDocument17 pagesProblemsMugiwara SparrowNo ratings yet
- STATICSDocument3 pagesSTATICSBenjie MorenoNo ratings yet
- Shear StrengthDocument17 pagesShear StrengthVon San Jose100% (1)
- Geotechnical Engineering - Ii (Foundation Engineering) : PilesDocument26 pagesGeotechnical Engineering - Ii (Foundation Engineering) : PilesPascasio PascasioNo ratings yet
- Agacita John PaulDocument10 pagesAgacita John PaulCarlo Dela CruzNo ratings yet
- Lecture 2 Tension MembersDocument62 pagesLecture 2 Tension MembersTyrone PaulinoNo ratings yet
- Republic of The Philippines: Engr. Jonathan C. BulagaoDocument3 pagesRepublic of The Philippines: Engr. Jonathan C. BulagaoMichael James ll BanawisNo ratings yet
- CEE330 - Influnece Lines PDFDocument9 pagesCEE330 - Influnece Lines PDFAvijit SahaNo ratings yet
- Analysis and Design of Doubly Reinforced BeamDocument18 pagesAnalysis and Design of Doubly Reinforced BeamKherstine Muyano TantayNo ratings yet
- P5 Effective StressDocument28 pagesP5 Effective StressMiguel TabaNo ratings yet
- Problem #3 - Plastic CentroidDocument2 pagesProblem #3 - Plastic CentroidYan YanNo ratings yet
- Mid Pre BoardDocument6 pagesMid Pre BoardJonathanNo ratings yet
- Republic of The Philippines: Engr. Jonathan C. BulagaoDocument5 pagesRepublic of The Philippines: Engr. Jonathan C. BulagaoMichael James ll BanawisNo ratings yet
- Corre Part1 AlgebraDocument11 pagesCorre Part1 AlgebraJoshua ColladoNo ratings yet
- Review Module: Steel Design - Plastic Analysis and The Collapse MechanismDocument3 pagesReview Module: Steel Design - Plastic Analysis and The Collapse MechanismDJ GRNo ratings yet
- (Nov2023) PRE-BOARD EXAMINATION (PSAD) - CEBU (A-M) - QuestionsDocument63 pages(Nov2023) PRE-BOARD EXAMINATION (PSAD) - CEBU (A-M) - Questionsgt201901573No ratings yet
- Factor UDocument1 pageFactor UseaedoNo ratings yet
- Problem No: 1: Submitted ToDocument4 pagesProblem No: 1: Submitted ToLight HouseNo ratings yet
- NSCP Code: Specificatio N ScoreDocument17 pagesNSCP Code: Specificatio N ScoreMarco SatomeraNo ratings yet
- IM BSCE 4 - Steel Design Part 1Document86 pagesIM BSCE 4 - Steel Design Part 1acurvz2005No ratings yet
- Tsu m2 Practice Problems TrigonometryDocument1 pageTsu m2 Practice Problems TrigonometryJAMNo ratings yet
- 01.degree of Determinacy and ReleasesDocument8 pages01.degree of Determinacy and ReleasesPeter D.No ratings yet
- Matrix Methods of AnalysisDocument74 pagesMatrix Methods of AnalysisjaffnaNo ratings yet
- Cse30301 2 2015Document44 pagesCse30301 2 2015王嵐No ratings yet
- CEE311 NotesDocument8 pagesCEE311 NotesAsiyah Abdullahi ShituNo ratings yet
- Rohini 80081119372Document10 pagesRohini 80081119372b ramachandraNo ratings yet
- Drinking Water: Prepared by Errold Paul B. GagarinDocument33 pagesDrinking Water: Prepared by Errold Paul B. GagarinErrold Paul GagarinNo ratings yet
- Ra7076 PDFDocument7 pagesRa7076 PDFCel DelabahanNo ratings yet
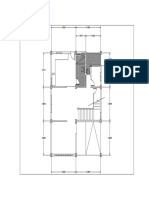
- A Proposed 2-Storey Residential HouseDocument18 pagesA Proposed 2-Storey Residential HouseErrold Paul GagarinNo ratings yet
- First Floor Plan (Presentation)Document1 pageFirst Floor Plan (Presentation)Errold Paul GagarinNo ratings yet
- Philippine Mining ActDocument41 pagesPhilippine Mining ActmamelaniesecurataNo ratings yet
- PD 1067 Amended IRRDocument27 pagesPD 1067 Amended IRRMer CeeNo ratings yet
- Terrestrial Ecology (Final)Document61 pagesTerrestrial Ecology (Final)Errold Paul GagarinNo ratings yet
- Review 0 of 0 Rene 1 Gulatory 0 EnvironmentDocument4 pagesReview 0 of 0 Rene 1 Gulatory 0 EnvironmentErrold Paul GagarinNo ratings yet
- Marine EcologyDocument43 pagesMarine EcologyErrold Paul GagarinNo ratings yet
- Principles of Terrestrial Ecosystem EologyDocument16 pagesPrinciples of Terrestrial Ecosystem EologyFilena RubioNo ratings yet
- UES Chapter 03 EIA Methodology FinalDocument24 pagesUES Chapter 03 EIA Methodology FinalErrold Paul GagarinNo ratings yet
- LegislationsDocument35 pagesLegislationsErrold Paul GagarinNo ratings yet
- Symbiotic RelationshipDocument12 pagesSymbiotic RelationshipErrold Paul GagarinNo ratings yet
- Terrestrial EcosystemsDocument160 pagesTerrestrial EcosystemsErrold Paul GagarinNo ratings yet
- CanterburyDocument366 pagesCanterburylalo198No ratings yet
- EIADocument191 pagesEIAErrold Paul GagarinNo ratings yet
- Timber SpeciesDocument212 pagesTimber SpeciesErrold Paul GagarinNo ratings yet
- Tos 1Document5 pagesTos 1Allyanna Elise Diam100% (1)
- CM - 6 - TOS II - Force MethodDocument16 pagesCM - 6 - TOS II - Force MethodCarlos Miguel GarciaNo ratings yet
- Static Indeterminacy: © 2012 The Mcgraw-Hill Companies, Inc. All Rights ReservedDocument7 pagesStatic Indeterminacy: © 2012 The Mcgraw-Hill Companies, Inc. All Rights ReservedKaoru AmaneNo ratings yet
- Chapter One PPT SadddDocument42 pagesChapter One PPT SadddDarek Haile100% (1)
- Lecture #6 Classification of Structural Analysis Problems. Statical DeterminacyDocument24 pagesLecture #6 Classification of Structural Analysis Problems. Statical DeterminacyLUIS ISAAC LEON PARONo ratings yet
- Statically Indeterminate ProblemsDocument15 pagesStatically Indeterminate ProblemsKibrom MenasboNo ratings yet
- CE 224 Mechanics of Deformable Bodies Module 4Document27 pagesCE 224 Mechanics of Deformable Bodies Module 4sheryl ann dionicioNo ratings yet
- Module 1.1 Introduction To Structural EngineeringDocument13 pagesModule 1.1 Introduction To Structural EngineeringBrent RaquinioNo ratings yet
- Ce8 Lecture 5Document23 pagesCe8 Lecture 5Raphael CajucomNo ratings yet
- EV204 2 IntroductionDocument12 pagesEV204 2 IntroductionYao SsengssNo ratings yet
- Fixed and Continuous BeamsDocument30 pagesFixed and Continuous BeamsSatinder Kaur Khatra - Civil Engg.No ratings yet
- ECEM - Application To Beam ProblemsDocument16 pagesECEM - Application To Beam ProblemsAnupEkboteNo ratings yet
- Ce 316 Structural Theory Module 1Document29 pagesCe 316 Structural Theory Module 1Espe SaquinNo ratings yet
- 7-Rigid Body Equilibrium - PartbDocument30 pages7-Rigid Body Equilibrium - PartbSai KumarNo ratings yet
- Unit Classification of Indeterminate Structures: StructureDocument21 pagesUnit Classification of Indeterminate Structures: StructureAyana AlemuNo ratings yet
- Evaluation Exam No. 1 - ManilaDocument8 pagesEvaluation Exam No. 1 - ManilaTaehyung KimNo ratings yet
- PROBLEM 6.62: Solution FBD TrussDocument10 pagesPROBLEM 6.62: Solution FBD TrussWilliam HendersonNo ratings yet
- FBD: 3D Force ReactionDocument52 pagesFBD: 3D Force ReactionCaleb JalmascoNo ratings yet
- Equilibrium & Support ReactionsDocument28 pagesEquilibrium & Support ReactionsKirshna JolaniaNo ratings yet
- 18ENG15 - Module 03Document32 pages18ENG15 - Module 03Prasidh Umesh ShettyNo ratings yet
- Chapter Objectives: 2005 Pearson Education South Asia Pte LTDDocument27 pagesChapter Objectives: 2005 Pearson Education South Asia Pte LTDpoom2007No ratings yet
- Structures and MaAterials (Lecture 2)Document31 pagesStructures and MaAterials (Lecture 2)ndoan_44No ratings yet
- Analysis of Statically Determinate Structures: Idealized StructureDocument23 pagesAnalysis of Statically Determinate Structures: Idealized Structureعبدالله عبدالحكيم عامرNo ratings yet
- Dubbel-Handbook of Mechanical EngineeringDocument918 pagesDubbel-Handbook of Mechanical EngineeringJuan Manuel Domínguez93% (27)
- Theory of StructuresDocument171 pagesTheory of StructuresTony OngNo ratings yet
- 205 NotesDocument69 pages205 Notessam00786No ratings yet
- SOLUCION Analisis Estructural - Hibbeler - 8ed-25-50 PDFDocument26 pagesSOLUCION Analisis Estructural - Hibbeler - 8ed-25-50 PDFDaniel VidalNo ratings yet
- Hibbeler 10e CH02Document46 pagesHibbeler 10e CH02Eugene ChandNo ratings yet