You might also like
- Mathematics 1St First Order Linear Differential Equations 2Nd Second Order Linear Differential Equations Laplace Fourier Bessel MathematicsFrom EverandMathematics 1St First Order Linear Differential Equations 2Nd Second Order Linear Differential Equations Laplace Fourier Bessel MathematicsNo ratings yet
- John P. D'Angelo, Several Complex Variables and The Geometry of Real HypersurfacesDocument288 pagesJohn P. D'Angelo, Several Complex Variables and The Geometry of Real HypersurfacesanthalyaNo ratings yet
- ProblemsDocument62 pagesProblemserad_5No ratings yet
- Solutions To Steven Kay's Statistical Estimation BookDocument16 pagesSolutions To Steven Kay's Statistical Estimation Bookmasoudsmart67% (3)
- Answers 5 2012Document11 pagesAnswers 5 2012Eric KerrNo ratings yet
- Optimal Control (Course Code: 191561620)Document4 pagesOptimal Control (Course Code: 191561620)Abdesselem BoulkrouneNo ratings yet
- FormulasDocument31 pagesFormulasJL PerezNo ratings yet
- Collective Classical & Quantum FieldsDocument410 pagesCollective Classical & Quantum FieldsAndrew Hucek100% (1)
- PDE Answers-2-2011Document11 pagesPDE Answers-2-2011Sandeep Saju100% (1)
- International Journal of Pure and Applied Mathematics No. 1 2012, 17-27Document12 pagesInternational Journal of Pure and Applied Mathematics No. 1 2012, 17-27boris laraNo ratings yet
- Puntos de EdpDocument3 pagesPuntos de EdpPetter LovedNo ratings yet
- Problem Set 6: n+1 N n+1 N 1 NDocument6 pagesProblem Set 6: n+1 N n+1 N 1 NanthalyaNo ratings yet
- Teschl ErrataDocument10 pagesTeschl ErratasandorNo ratings yet
- hw4 SolDocument5 pageshw4 SolanthalyaNo ratings yet
- Sol hmw3Document5 pagesSol hmw3Martín FigueroaNo ratings yet
- H2-Optimal Control - Lec8Document83 pagesH2-Optimal Control - Lec8stara123warNo ratings yet
- Tutorial 2Document6 pagesTutorial 2irakool2014No ratings yet
- Problems and Solutions in Differential Geometry and ApplicationsDocument125 pagesProblems and Solutions in Differential Geometry and ApplicationsseimomNo ratings yet
- Partial Differential Equations (Week 2) First Order Pdes: Gustav Holzegel January 24, 2019Document16 pagesPartial Differential Equations (Week 2) First Order Pdes: Gustav Holzegel January 24, 2019PLeaseNo ratings yet
- EE585 Fall2009 Hw3 SolDocument2 pagesEE585 Fall2009 Hw3 Solnoni496No ratings yet
- Digital CommunicationDocument8 pagesDigital CommunicationShulav PoudelNo ratings yet
- Spring 2005 SolutionsDocument11 pagesSpring 2005 SolutionsÖzge TüncelNo ratings yet
- 7 On Partial Differential EquationsDocument7 pages7 On Partial Differential EquationsShreyaSharmaNo ratings yet
- Lec 5Document3 pagesLec 5Atom CarbonNo ratings yet
- a, a, …, a, α, …, α a α a α a …+α a a, a, …, a a α a α a …+α a α …=αDocument7 pagesa, a, …, a, α, …, α a α a α a …+α a a, a, …, a a α a α a …+α a α …=αKimondo KingNo ratings yet
- Example 3Document2 pagesExample 3aqszaqszNo ratings yet
- Paperia 2 2023-2Document7 pagesPaperia 2 2023-2ayanoaishi1980No ratings yet
- Problem Set 7: Y 2 X Y X ∞ −∞ X dω 2πDocument4 pagesProblem Set 7: Y 2 X Y X ∞ −∞ X dω 2πanthalyaNo ratings yet
- Chapter2 PDFDocument11 pagesChapter2 PDFDilham WahyudiNo ratings yet
- MATH2019 Course Problems 2012s1Document15 pagesMATH2019 Course Problems 2012s1Seanam DMNo ratings yet
- Wχ f F FDocument7 pagesWχ f F FKarl Stessy PremierNo ratings yet
- MIT ExercisesDocument11 pagesMIT ExercisesSorin MiuNo ratings yet
- Wave EquationDocument18 pagesWave EquationBibekNo ratings yet
- Sdof DynDocument29 pagesSdof DynAnkur KurmiNo ratings yet
- QuestionsDocument3 pagesQuestionssanmitrazNo ratings yet
- Spotlight PropertiesWaveEquationsDocument6 pagesSpotlight PropertiesWaveEquationsAlisonNo ratings yet
- MA 102 (Ordinary Differential Equations)Document2 pagesMA 102 (Ordinary Differential Equations)Akshay NarasimhaNo ratings yet
- HW09Document4 pagesHW09Cody SageNo ratings yet
- Wave Equation and Heat Equation-NewDocument12 pagesWave Equation and Heat Equation-NewRabsimranSinghNo ratings yet
- FALLSEM2019-20 MAT2002 ELA VL2019201000472 Reference Material I 29-Aug-2019 EXP 3ADocument5 pagesFALLSEM2019-20 MAT2002 ELA VL2019201000472 Reference Material I 29-Aug-2019 EXP 3APrashant JhaNo ratings yet
- qms17 7sDocument9 pagesqms17 7sMarisol Hernández SánchezNo ratings yet
- MATH207 - Assignment 1Document1 pageMATH207 - Assignment 1BinoNo ratings yet
- Solutions To Problems For 2D & 3D Heat and Wave EquationsDocument15 pagesSolutions To Problems For 2D & 3D Heat and Wave EquationscemnuyNo ratings yet
- Tutorial Chapter 1 and 2 Memo-1Document13 pagesTutorial Chapter 1 and 2 Memo-1u20417242No ratings yet
- HW4 SolutionDocument6 pagesHW4 SolutionDi WuNo ratings yet
- 09 Fall Exam2Document2 pages09 Fall Exam2Mriganabh ChoudhuryNo ratings yet
- Topic 2Document9 pagesTopic 2HENRY ZULUNo ratings yet
- Assignment 3Document11 pagesAssignment 3tiffanyyy00No ratings yet
- Problems Markov ChainsDocument35 pagesProblems Markov ChainsJuan Carlos FdzNo ratings yet
- HW9 SolutionDocument5 pagesHW9 Solutionkalloy01100% (1)
- Exercise Set 05Document5 pagesExercise Set 05puss_trNo ratings yet
- Hw1sol PDFDocument9 pagesHw1sol PDFRohit BhadauriaNo ratings yet
- M597K: Solution To Homework Assignment 7: 1. Show That The Sequence (XDocument6 pagesM597K: Solution To Homework Assignment 7: 1. Show That The Sequence (XCarlosRiverosVillagraNo ratings yet
- Prob 4Document12 pagesProb 4Md Arif Hasan50% (2)
- 7차과제풀이 (12 1-12 7)Document11 pages7차과제풀이 (12 1-12 7)obinakanuNo ratings yet
- 6 Wave Equation: TT 2 XXDocument14 pages6 Wave Equation: TT 2 XXJoel CarredoNo ratings yet
- A Homework On Solid Mechanics: Problem 1: Determinant Identity Q.1aDocument5 pagesA Homework On Solid Mechanics: Problem 1: Determinant Identity Q.1aAmritaNo ratings yet
- IMC 2010 (Day 2)Document4 pagesIMC 2010 (Day 2)Liu ShanlanNo ratings yet
- $R3MB5VLDocument4 pages$R3MB5VLhusseinmarwan589No ratings yet
- Green's Function Estimates for Lattice Schrödinger Operators and Applications. (AM-158)From EverandGreen's Function Estimates for Lattice Schrödinger Operators and Applications. (AM-158)No ratings yet
- Franz Rothe, Towards A Course in AnalysisDocument104 pagesFranz Rothe, Towards A Course in AnalysisanthalyaNo ratings yet
- (Helmut Satz (Auth.) ) Ultimate Horizons Probing T (Book4You)Document175 pages(Helmut Satz (Auth.) ) Ultimate Horizons Probing T (Book4You)anthalya100% (1)
- Zhi Dong Bai, Random Matrix Theory and Its ApplicationsDocument174 pagesZhi Dong Bai, Random Matrix Theory and Its ApplicationsanthalyaNo ratings yet
- Statistical Physics IIIDocument43 pagesStatistical Physics IIIanthalyaNo ratings yet
- Skript QFT2Document107 pagesSkript QFT2anthalyaNo ratings yet
- 05 Fall Exam1 SolnDocument2 pages05 Fall Exam1 SolnanthalyaNo ratings yet
- Problem Set 2: Topological Spaces: Your Name: Due: Thursday, February 11Document5 pagesProblem Set 2: Topological Spaces: Your Name: Due: Thursday, February 11anthalyaNo ratings yet
- Solutions To Problem Set 3: Limits and ClosuresDocument4 pagesSolutions To Problem Set 3: Limits and ClosuresanthalyaNo ratings yet
- Problem Set 1: A Set-Theory Diagnostic: A 2A A 2A A 2A A 2ADocument3 pagesProblem Set 1: A Set-Theory Diagnostic: A 2A A 2A A 2A A 2AanthalyaNo ratings yet
- Problem Set 2: Topological Spaces: Your Name: Due: Thursday, February 11Document2 pagesProblem Set 2: Topological Spaces: Your Name: Due: Thursday, February 11anthalyaNo ratings yet
- HW 3Document2 pagesHW 3anthalyaNo ratings yet
- Problem Set 3: Limits and Closures: Your Name: Due: Thursday, February 18Document2 pagesProblem Set 3: Limits and Closures: Your Name: Due: Thursday, February 18anthalyaNo ratings yet
- Problem Set 1: A Set-Theory Diagnostic: Your Name: Due: Tuesday, February 9Document3 pagesProblem Set 1: A Set-Theory Diagnostic: Your Name: Due: Tuesday, February 9anthalyaNo ratings yet
- Problem Set 7: Y 2 X Y X ∞ −∞ X dω 2πDocument4 pagesProblem Set 7: Y 2 X Y X ∞ −∞ X dω 2πanthalyaNo ratings yet
- Solutions To Exam 1: 1 2 N N A NDocument3 pagesSolutions To Exam 1: 1 2 N N A NanthalyaNo ratings yet
- Problem Set 5: N 2 N N 2 NDocument6 pagesProblem Set 5: N 2 N N 2 NanthalyaNo ratings yet
- Homework Assignment 6Document1 pageHomework Assignment 6anthalyaNo ratings yet
- Homework Assignment 4Document1 pageHomework Assignment 4anthalyaNo ratings yet
- hw3 SolDocument8 pageshw3 SolanthalyaNo ratings yet
- Homework Assignment 5Document1 pageHomework Assignment 5anthalyaNo ratings yet
- Homework Assignment 7Document1 pageHomework Assignment 7anthalyaNo ratings yet
- ECE 534 - Random ProcessesDocument2 pagesECE 534 - Random ProcessesanthalyaNo ratings yet
- hw2 SolDocument6 pageshw2 SolanthalyaNo ratings yet
- HW 2Document1 pageHW 2anthalyaNo ratings yet
- hw1, Random ProcessesDocument2 pageshw1, Random ProcessesanthalyaNo ratings yet
- hw1 SolDocument6 pageshw1 SolanthalyaNo ratings yet
- Doron Barnea 1993 Three Layer Model For Solid Liquid FlowDocument15 pagesDoron Barnea 1993 Three Layer Model For Solid Liquid FlowrestdeepakNo ratings yet
- Theory of YieldingDocument10 pagesTheory of YieldingrasprasadNo ratings yet
- Other Forms of Work and First Law of ThermodynamicsDocument18 pagesOther Forms of Work and First Law of ThermodynamicsSerimNo ratings yet
- Seismic Bridge Design According To Eurocode 8 and SIA 160Document12 pagesSeismic Bridge Design According To Eurocode 8 and SIA 160ShamaNo ratings yet
- Analytical Calculation of D - and Q-Axis InductanceDocument11 pagesAnalytical Calculation of D - and Q-Axis InductanceWaleed J. Hassn100% (1)
- ENITV31D: Intervention For Physics: Chapter 2B: FrictionDocument3 pagesENITV31D: Intervention For Physics: Chapter 2B: FrictionHarvey MorosNo ratings yet
- Me201: Mechanics of Solids: End Semester ExamDocument1 pageMe201: Mechanics of Solids: End Semester ExamMuzammil MuhammedNo ratings yet
- Physics: Chapter - Dual Nature of Radiation and Matter Chapterwise Practise Problems (CPP) For NEETDocument12 pagesPhysics: Chapter - Dual Nature of Radiation and Matter Chapterwise Practise Problems (CPP) For NEETsoyel afridiNo ratings yet
- CE 14 Course SyllabusDocument2 pagesCE 14 Course SyllabusChristian GalopeNo ratings yet
- JEE (ADV) 2015 SOLUTION Paper 1 PDFDocument28 pagesJEE (ADV) 2015 SOLUTION Paper 1 PDFAakash KapoorNo ratings yet
- Electrical Power Systems: Mohamed Taha MouwafiDocument12 pagesElectrical Power Systems: Mohamed Taha MouwafiAHMED BAKRNo ratings yet
- Solved Exercise MassDocument3 pagesSolved Exercise MassMalak HindiNo ratings yet
- Lecture Notes For Section 16-7Document25 pagesLecture Notes For Section 16-7Joshua D'CruzNo ratings yet
- r19 Edc Notes - All UnitsDocument165 pagesr19 Edc Notes - All Unitsbaburao_kodavatiNo ratings yet
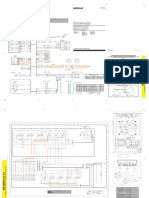
- Cat PDFDocument2 pagesCat PDFIreneusz PłusaNo ratings yet
- Boussinesq Formulae For The Vertical Stress IncrementDocument2 pagesBoussinesq Formulae For The Vertical Stress Incrementmarius1979No ratings yet
- Fpure ContentsDocument2 pagesFpure Contentsadityacsk100% (1)
- COMEDK 2024 Preparation Guide EbookDocument966 pagesCOMEDK 2024 Preparation Guide EbookVeerar ANo ratings yet
- Aqa Chem4 QP Jun14Document24 pagesAqa Chem4 QP Jun14mystreet123No ratings yet
- Journal of Thermal StressesDocument30 pagesJournal of Thermal Stressesडॉ. कनिष्क शर्माNo ratings yet
- Nicol PrismDocument22 pagesNicol PrismVishwath Ram75% (8)
- An Investigation of The Charge Distributions : Department of Physics, National Taiwan University Taipei, TaiwanDocument9 pagesAn Investigation of The Charge Distributions : Department of Physics, National Taiwan University Taipei, Taiwantsania nkdNo ratings yet
- ID CoolFlowDocument4 pagesID CoolFlowycwbycwbNo ratings yet
- List of Important Books of PhysicsDocument6 pagesList of Important Books of PhysicsAbubakar Mughal0% (1)
- Control Moment Gyroscope Gimbal Actuator StudyDocument239 pagesControl Moment Gyroscope Gimbal Actuator StudyBNo ratings yet
- CE222 SM 07 Specific Gravity DeterminationDocument34 pagesCE222 SM 07 Specific Gravity DeterminationMuh UmaNo ratings yet
- YyyDocument18 pagesYyyWeqas khanNo ratings yet
- Final Exam - 2017 PDFDocument7 pagesFinal Exam - 2017 PDFOlla 8352No ratings yet