You might also like
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- CH 2Document42 pagesCH 2Khmer ChamNo ratings yet
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- CH 5Document26 pagesCH 5Catalin TomaNo ratings yet
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- CH 4Document59 pagesCH 4Khmer ChamNo ratings yet
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (890)
- CH 3Document51 pagesCH 3Khmer ChamNo ratings yet
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (587)
- CH 6Document44 pagesCH 6Khmer ChamNo ratings yet
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- M 54 Lecture 12Document3 pagesM 54 Lecture 12Khmer ChamNo ratings yet
- Connected Spaces: ConnectednessDocument3 pagesConnected Spaces: ConnectednessKhmer ChamNo ratings yet
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (399)
- M 54 Lecture 17Document3 pagesM 54 Lecture 17Khmer ChamNo ratings yet
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- M 54 Hwsolns 5Document5 pagesM 54 Hwsolns 5Khmer ChamNo ratings yet
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Ch1-Sets and FunctionsDocument20 pagesCh1-Sets and FunctionsKhmer ChamNo ratings yet
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- M 54 Lecture 14Document4 pagesM 54 Lecture 14Khmer ChamNo ratings yet
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- 0606 Scheme of Work (For Examination From 2016)Document64 pages0606 Scheme of Work (For Examination From 2016)Khmer Cham100% (2)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (73)
- Grade 8 - 2Document1 pageGrade 8 - 2Khmer ChamNo ratings yet
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (265)
- 12 4 2004 Undergrad Top Moore MethodDocument48 pages12 4 2004 Undergrad Top Moore MethodkhongtinNo ratings yet
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2219)
- Grade 8 - Exercises On ProbabilityDocument1 pageGrade 8 - Exercises On ProbabilityKhmer Cham100% (1)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- Lag 8Document5 pagesLag 8Khmer ChamNo ratings yet
- Algebraic Topology and 2-ManifoldsDocument127 pagesAlgebraic Topology and 2-ManifoldsHam KarimNo ratings yet
- Application Form DUO Sweden 2013Document5 pagesApplication Form DUO Sweden 2013Khmer ChamNo ratings yet
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- Application Form DUO Sweden 2013Document5 pagesApplication Form DUO Sweden 2013Khmer ChamNo ratings yet
- Sturm 1Document11 pagesSturm 1Khmer ChamNo ratings yet
- L9 Vectors in SpaceDocument4 pagesL9 Vectors in SpaceKhmer ChamNo ratings yet
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- Lag 3Document4 pagesLag 3Khmer ChamNo ratings yet
- BEAMER appearance cheat sheetDocument5 pagesBEAMER appearance cheat sheetgladioacutoNo ratings yet
- Lag 10Document4 pagesLag 10Khmer ChamNo ratings yet
- Lag 11Document4 pagesLag 11Khmer ChamNo ratings yet
- Lag 12Document4 pagesLag 12Khmer ChamNo ratings yet
- L4 Row EquivalenceDocument4 pagesL4 Row EquivalenceKhmer ChamNo ratings yet
- L2 Square Matrices and Determinants: 1 0 0 1 A A A A A A A A A A A A A A A A A A 1 0 0 0 1 0 0 0 1Document4 pagesL2 Square Matrices and Determinants: 1 0 0 1 A A A A A A A A A A A A A A A A A A 1 0 0 0 1 0 0 0 1Khmer ChamNo ratings yet
- Lag 1Document4 pagesLag 1Khmer ChamNo ratings yet
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (119)
- 37eb PDFDocument29 pages37eb PDFZikriaKMuhammadNo ratings yet
- 0901d1968065f1f4 Bearing Preload - TCM - 12 299896Document7 pages0901d1968065f1f4 Bearing Preload - TCM - 12 299896anush_swaminathanNo ratings yet
- JEE Class Companion Physics: Module-9Document227 pagesJEE Class Companion Physics: Module-9RupakNo ratings yet
- Ricapito-1 PbLi-T DatabaseDocument16 pagesRicapito-1 PbLi-T DatabaseSasa DjordjevicNo ratings yet
- Docc 1990Document7 pagesDocc 1990swchenNo ratings yet
- Preparation of Turkey Red OilDocument16 pagesPreparation of Turkey Red OilHimanshu Jha73% (11)
- 12 Class Physics 1-Chapter Sample Paper PDFDocument9 pages12 Class Physics 1-Chapter Sample Paper PDFharshNo ratings yet
- Effect of Speration in Modified BitumenDocument12 pagesEffect of Speration in Modified BitumenyadavameNo ratings yet
- Computer Networks Radio Waves: Submitted By: 1.naina Gupta 2.sunidhi Dwivedi Submitted To: Ms. Asha Ma'amDocument9 pagesComputer Networks Radio Waves: Submitted By: 1.naina Gupta 2.sunidhi Dwivedi Submitted To: Ms. Asha Ma'amsantaNo ratings yet
- Airborne Wind Energy SystemDocument27 pagesAirborne Wind Energy SystemAbin BabyNo ratings yet
- TFA 1 2 3 4 5 6 7 8 9 10 in Nozzles Sizes: OptionDocument1 pageTFA 1 2 3 4 5 6 7 8 9 10 in Nozzles Sizes: OptionrajkumarfNo ratings yet
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- Dambrk Modeling MethodologyDocument38 pagesDambrk Modeling MethodologyDevi DephieNo ratings yet
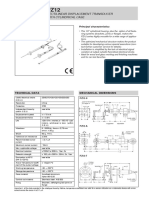
- Rectilinear Displacement Transducer With Cylindrical Case: Technical Data Mechanical DimensionsDocument2 pagesRectilinear Displacement Transducer With Cylindrical Case: Technical Data Mechanical Dimensionsl561926No ratings yet
- 06.-Medidor Cloro CL4000enDocument18 pages06.-Medidor Cloro CL4000enLeonel RubioNo ratings yet
- Ewald SphereDocument57 pagesEwald SphereMohammad Rameez0% (1)
- Mechanics of Solids: Bela I. Sandor Ryan Roloff Stephen M. Birn Maan H. Jawad Michael L. BrownDocument1 pageMechanics of Solids: Bela I. Sandor Ryan Roloff Stephen M. Birn Maan H. Jawad Michael L. BrownkprasannanNo ratings yet
- Analytical Chemistry & Numerical MCQ Test 3 - Makox MCQsDocument5 pagesAnalytical Chemistry & Numerical MCQ Test 3 - Makox MCQsنونه الحنونةNo ratings yet
- Magic Equation r1 (All Codes)Document16 pagesMagic Equation r1 (All Codes)Prashant SunagarNo ratings yet
- Design of A Digital Control System and Path Planning Module For The ED-7220C Robot ArmDocument66 pagesDesign of A Digital Control System and Path Planning Module For The ED-7220C Robot ArmTarek Bmr100% (3)
- Numericals - RajasthanUniversity - Papers End Sem ChemDocument20 pagesNumericals - RajasthanUniversity - Papers End Sem ChemJanmendraNo ratings yet
- Electrostatic Discharge Ignition of Energetic MaterialsDocument9 pagesElectrostatic Discharge Ignition of Energetic Materialspamos1111No ratings yet
- Control System (136-248) PDFDocument113 pagesControl System (136-248) PDFmuruganNo ratings yet
- Cluster Level Question Bank (Ahmedabad & Gandhinagar Cluster)Document33 pagesCluster Level Question Bank (Ahmedabad & Gandhinagar Cluster)manpreetsingh3458417No ratings yet
- Vacita Integrated ServicesDocument21 pagesVacita Integrated ServicesNwosu AugustineNo ratings yet
- Vibration assignment on 3DOF cantilever beam systemDocument5 pagesVibration assignment on 3DOF cantilever beam systemIzzah 'AtirahNo ratings yet
- Human at Mars PDFDocument55 pagesHuman at Mars PDFVuningoma BoscoNo ratings yet
- Review of Literature On Probability of Detection For Liquid Penetrant Nondestructive TestingDocument51 pagesReview of Literature On Probability of Detection For Liquid Penetrant Nondestructive TestingVicky GautamNo ratings yet
- Final Cassava Grating MachineDocument7 pagesFinal Cassava Grating Machinenormelyn100% (2)
- Comparison of Design of Steel Roof Truss Using IS 875 and SP 38Document3 pagesComparison of Design of Steel Roof Truss Using IS 875 and SP 38anbugobiNo ratings yet
- Helm (2008) : Section 32.4: Parabolic PdesDocument24 pagesHelm (2008) : Section 32.4: Parabolic Pdestarek mahmoudNo ratings yet
- Calculus Made Easy: Being a Very-Simplest Introduction to Those Beautiful Methods of Reckoning Which are Generally Called by the Terrifying Names of the Differential Calculus and the Integral CalculusFrom EverandCalculus Made Easy: Being a Very-Simplest Introduction to Those Beautiful Methods of Reckoning Which are Generally Called by the Terrifying Names of the Differential Calculus and the Integral CalculusRating: 4.5 out of 5 stars4.5/5 (2)
- Quantum Physics: A Beginners Guide to How Quantum Physics Affects Everything around UsFrom EverandQuantum Physics: A Beginners Guide to How Quantum Physics Affects Everything around UsRating: 5 out of 5 stars5/5 (2)
- Making and Tinkering With STEM: Solving Design Challenges With Young ChildrenFrom EverandMaking and Tinkering With STEM: Solving Design Challenges With Young ChildrenNo ratings yet
- Basic Math & Pre-Algebra Workbook For Dummies with Online PracticeFrom EverandBasic Math & Pre-Algebra Workbook For Dummies with Online PracticeRating: 4 out of 5 stars4/5 (2)
- Mathematical Mindsets: Unleashing Students' Potential through Creative Math, Inspiring Messages and Innovative TeachingFrom EverandMathematical Mindsets: Unleashing Students' Potential through Creative Math, Inspiring Messages and Innovative TeachingRating: 4.5 out of 5 stars4.5/5 (21)