You might also like
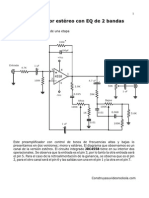
- Preamp 2 Bandas-Estereo y MonoDocument9 pagesPreamp 2 Bandas-Estereo y MonoMarce Flowers50% (2)
- Info 4Document5 pagesInfo 4dimba1989No ratings yet
- Comunicaciones Cap IDocument57 pagesComunicaciones Cap Idimba1989No ratings yet
- Informe 1Document3 pagesInforme 1dimba1989No ratings yet
- Tono DiscretoDocument5 pagesTono Discretovdăduică100% (1)
- Nucleos Toroidales PDFDocument4 pagesNucleos Toroidales PDFallainalexanderNo ratings yet
- InterrupcionesDocument15 pagesInterrupcionesOMARMORO25No ratings yet
- Tema 4Document97 pagesTema 4Samantha QuintasNo ratings yet
- TemporizadoresDocument14 pagesTemporizadoresJonathan DanielNo ratings yet
- Análisis de La Respuesta Temporal 2 ParteDocument93 pagesAnálisis de La Respuesta Temporal 2 Partedimba1989No ratings yet
- Manual SimulinkDocument41 pagesManual Simulinkd_flamarich7358No ratings yet
- Análisis de La Respuesta Temporal 3 ParteDocument23 pagesAnálisis de La Respuesta Temporal 3 Partedimba1989No ratings yet
- RedesDocument32 pagesRedesdimba1989No ratings yet
- CAPITULO 4 Capa de Transporte Del Modelo OSIDocument33 pagesCAPITULO 4 Capa de Transporte Del Modelo OSILORDRAMSES100% (4)
- Análisis de La Respuesta Temporal 2 ParteDocument93 pagesAnálisis de La Respuesta Temporal 2 Partedimba1989No ratings yet
- CAPITULO 3 Protocolos y Funcionalidad de La Capa de AplicaciónDocument32 pagesCAPITULO 3 Protocolos y Funcionalidad de La Capa de AplicaciónLORDRAMSES100% (2)
- Modulo1 Ccna Exploration Capitulos 5 y 6Document103 pagesModulo1 Ccna Exploration Capitulos 5 y 6elprofe_redesNo ratings yet
- CAPITULO 8 Capa Física Del Modelo OSIDocument30 pagesCAPITULO 8 Capa Física Del Modelo OSILORDRAMSES100% (8)
- CAPITULO 7 Capa de Enlace de DatosDocument33 pagesCAPITULO 7 Capa de Enlace de DatosLORDRAMSES100% (5)
- CAPITULO 7 Capa de Enlace de DatosDocument33 pagesCAPITULO 7 Capa de Enlace de DatosLORDRAMSES100% (5)
- CAPITULO 4 Capa de Transporte Del Modelo OSIDocument33 pagesCAPITULO 4 Capa de Transporte Del Modelo OSILORDRAMSES100% (4)
- CAPITULO 3 Protocolos y Funcionalidad de La Capa de AplicaciónDocument32 pagesCAPITULO 3 Protocolos y Funcionalidad de La Capa de AplicaciónLORDRAMSES100% (2)
- FICHA 5 Funciones Lineal y Afin 2017Document10 pagesFICHA 5 Funciones Lineal y Afin 2017Millagy2No ratings yet
- Guia Teorico Practica 1 - FuncionesDocument7 pagesGuia Teorico Practica 1 - FuncionesCinthia ItguNo ratings yet
- Uso de Las Distribuciones de Probabilidad en La Simulacion de Sistemas ProductivosDocument11 pagesUso de Las Distribuciones de Probabilidad en La Simulacion de Sistemas ProductivosiorifoarNo ratings yet
- Cálculo Lambda GrupoDocument31 pagesCálculo Lambda GrupoFERNANDONo ratings yet
- 1.10 PLAN CURRICULAR ANUAL 10mo MatemáticasDocument15 pages1.10 PLAN CURRICULAR ANUAL 10mo Matemáticascarlos calleNo ratings yet
- Modelos Matematicos PDFDocument10 pagesModelos Matematicos PDFUlises Gustavo Vela Bustillos50% (2)
- Guia para Usar LINDODocument9 pagesGuia para Usar LINDONd JsNo ratings yet
- FUNCIONESDocument3 pagesFUNCIONESMiguel Celis PinzonNo ratings yet
- Proyecto de Innovacion - MatematicaDocument9 pagesProyecto de Innovacion - MatematicaAriana CamposNo ratings yet
- Actividad de InvestigaciónDocument13 pagesActividad de InvestigaciónAlexander Olvera LugoNo ratings yet
- Mapas de Karnaugh. Capítulo Mapas de KarnaughDocument17 pagesMapas de Karnaugh. Capítulo Mapas de KarnaughWalter CaballeroNo ratings yet
- Sistemas Dinamicos DiscretosDocument4 pagesSistemas Dinamicos DiscretosEd DyNo ratings yet
- Trabajo Metodos Unidad5Document32 pagesTrabajo Metodos Unidad5Daniel AlmanzaNo ratings yet
- Ejercicios Resueltos - Dinámica HibbelerDocument31 pagesEjercicios Resueltos - Dinámica HibbelerAnonymous ZYvFEFR100% (1)
- Programación Estructurada - Evaluacion 3 - PDocument5 pagesProgramación Estructurada - Evaluacion 3 - Pmiguel antonio gonzález arciniegaNo ratings yet
- Simulador InevalDocument46 pagesSimulador InevalJuan Anilema100% (1)
- Serie de PotenciasDocument4 pagesSerie de PotenciasCarlos RobertoNo ratings yet
- Tarea 4 - Desarrollar Cuestionario Sobre Funciones, Trigonometría e HipernometríaDocument5 pagesTarea 4 - Desarrollar Cuestionario Sobre Funciones, Trigonometría e HipernometríaRaul Andres CastañedaNo ratings yet
- Sesiones de Matemática Todo El Mes 1278Document19 pagesSesiones de Matemática Todo El Mes 1278cristhiancabezas100% (2)
- 08 Silabo de Informatica II PDFDocument7 pages08 Silabo de Informatica II PDFLuis RiscoNo ratings yet
- Planeacion de Ventas y Operaciones - S OP - Ejemplo VollmannDocument15 pagesPlaneacion de Ventas y Operaciones - S OP - Ejemplo VollmannMeneses GuillermoNo ratings yet
- René Guenón - Autoridad Espiritual y Poder TemporalDocument53 pagesRené Guenón - Autoridad Espiritual y Poder Temporaljavielkaiser100% (1)
- Formulas BásicasDocument8 pagesFormulas BásicasEmerson MacarioNo ratings yet
- Mat2 Derivadas ParcialesDocument14 pagesMat2 Derivadas ParcialesAlex JacoboNo ratings yet
- Simbolos MatematicosDocument110 pagesSimbolos MatematicosKevin RivasNo ratings yet
- Funciones TrigonométricasDocument17 pagesFunciones TrigonométricasJuancarlos Ponce100% (1)
- Practica 12006Document19 pagesPractica 12006Adalid Leonela AdalidNo ratings yet
- Excel Sintaxis FormulasDocument9 pagesExcel Sintaxis FormulasMauricio RojasNo ratings yet
- Probabilidad y Estadística 2011-1 Acordeon 1Document9 pagesProbabilidad y Estadística 2011-1 Acordeon 1vimahy4126No ratings yet