You might also like
- Trifoleado QuimicaDocument2 pagesTrifoleado QuimicaReynaldo VaraNo ratings yet
- Topologia - Jaime Vara FeriaDocument31 pagesTopologia - Jaime Vara FeriaReynaldo VaraNo ratings yet
- Examen ResueltoDocument2 pagesExamen ResueltoReynaldo VaraNo ratings yet
- CV Curriculun Mendoza BonifacioDocument2 pagesCV Curriculun Mendoza BonifacioReynaldo VaraNo ratings yet
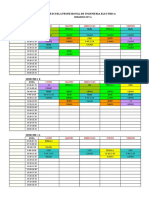
- Horarios 2017-A 50 Min Final Cartilla (Recuperado)Document50 pagesHorarios 2017-A 50 Min Final Cartilla (Recuperado)Reynaldo VaraNo ratings yet
- Trabajo DlgsilentDocument36 pagesTrabajo DlgsilentReynaldo VaraNo ratings yet
- La Membrana de ÓsmosisDocument9 pagesLa Membrana de ÓsmosisReynaldo VaraNo ratings yet
- Jaime Vara Feria - CaratulaDocument2 pagesJaime Vara Feria - CaratulaReynaldo VaraNo ratings yet
- Notas Ssee 2Document1 pageNotas Ssee 2Reynaldo VaraNo ratings yet
- 8Document8 pages8Reynaldo VaraNo ratings yet
- 10Document12 pages10Reynaldo VaraNo ratings yet
- Final Horarios 2016 B OcsaDocument6 pagesFinal Horarios 2016 B OcsaReynaldo VaraNo ratings yet
- Calculos de IluminacionDocument8 pagesCalculos de IluminacionReynaldo VaraNo ratings yet
- 769 PubDocument532 pages769 PubGilberto Gutierrez GutierrezNo ratings yet
- 8Document8 pages8Reynaldo VaraNo ratings yet
- Laboratorio Numero 2Document17 pagesLaboratorio Numero 2Reynaldo VaraNo ratings yet
- 3 PoppppppppppppppppppppppppppppppDocument10 pages3 PoppppppppppppppppppppppppppppppReynaldo VaraNo ratings yet
- Horario ReynaldoDocument2 pagesHorario ReynaldoReynaldo VaraNo ratings yet
- Normas de Sguridad y Utilizacion de InstrumentosDocument11 pagesNormas de Sguridad y Utilizacion de InstrumentosReynaldo VaraNo ratings yet
- Practica 1yyyDocument1 pagePractica 1yyyHum PaulNo ratings yet
- Circuitos Electrónicos 1 Clase JDocument28 pagesCircuitos Electrónicos 1 Clase JReynaldo VaraNo ratings yet
- Infraestructura23Document4 pagesInfraestructura23Reynaldo VaraNo ratings yet
- CaratulaaaaaaaaaaaaaaaaaaDocument1 pageCaratulaaaaaaaaaaaaaaaaaaReynaldo VaraNo ratings yet
- Jaime Reynaldo Vara Feria - HorarioDocument2 pagesJaime Reynaldo Vara Feria - HorarioReynaldo VaraNo ratings yet
- Practica 4Document7 pagesPractica 4LuthekLudelAlfaroNo ratings yet
- Diseã - o de Estaciones PDFDocument1 pageDiseã - o de Estaciones PDFReynaldo VaraNo ratings yet
- Diseño de EstacionesDocument3 pagesDiseño de EstacionesReynaldo VaraNo ratings yet
- Jaime Reynaldo Vara Feria - HorarioDocument2 pagesJaime Reynaldo Vara Feria - HorarioReynaldo VaraNo ratings yet
- CaratulaaaaaaaaaaaaaaaaaaDocument1 pageCaratulaaaaaaaaaaaaaaaaaaReynaldo VaraNo ratings yet
- AEA4448YXADocument2 pagesAEA4448YXADASIHER2111No ratings yet
- Tema 56 Potencia en Corriente AlternaDocument10 pagesTema 56 Potencia en Corriente AlternaAndrealNo ratings yet
- Ensamblaje de Computadora - Hardware de ComputadorasDocument45 pagesEnsamblaje de Computadora - Hardware de ComputadorasVladimir Ruben Poma LimachiNo ratings yet
- Arduino PDFDocument19 pagesArduino PDFOjeda ThomasNo ratings yet
- Bravo Cordova Christian IsaiasDocument20 pagesBravo Cordova Christian IsaiasVictor Andrei Villegas RamosNo ratings yet
- Costes de EnergiaDocument5 pagesCostes de EnergiaHENRY RONALDO QUISPE FACUNDONo ratings yet
- Capitulo 6 Transformadores para InstrumentosDocument26 pagesCapitulo 6 Transformadores para InstrumentosLUISNo ratings yet
- Biposte PDFDocument25 pagesBiposte PDFSilvana JondecNo ratings yet
- Articulo Introducción A La Electrónica de PotenciaDocument5 pagesArticulo Introducción A La Electrónica de PotenciaMario Andres Rodríguez PinedaNo ratings yet
- EMD-Enchufes 8kV - RepuestosDocument3 pagesEMD-Enchufes 8kV - RepuestosAF VMNo ratings yet
- Reporte Admin Entrada y SalidaDocument3 pagesReporte Admin Entrada y SalidaSergio HernandezNo ratings yet
- Ley de Ohm, Potencia y Energía 2-1Document21 pagesLey de Ohm, Potencia y Energía 2-1Enzo ReyesNo ratings yet
- Memorias NANDDocument13 pagesMemorias NANDaldinaenNo ratings yet
- Evolución Del Teléfono Fijo Al Teléfono CelularDocument10 pagesEvolución Del Teléfono Fijo Al Teléfono CelularSoraya Ileana Pinto AlvarezNo ratings yet
- Electro Tec NiaDocument7 pagesElectro Tec Nialuis mujicaNo ratings yet
- Examen de Supervisores ResueltoDocument8 pagesExamen de Supervisores ResueltoALEJANDRO CARBONELLNo ratings yet
- 1.9 Captacion SatelitalDocument13 pages1.9 Captacion SatelitalMiguel Angel Londoño GarciaNo ratings yet
- Unidad 2 - Fundamentos de Hardware Del ComputadorDocument88 pagesUnidad 2 - Fundamentos de Hardware Del ComputadorFernando Espinal RodríguezNo ratings yet
- Ups y SPS ExpDocument21 pagesUps y SPS ExpAlex Borquez100% (1)
- Cotizacion Ate 2 - VitarteDocument1 pageCotizacion Ate 2 - VitarteMarco SalinasNo ratings yet
- Control de Convertidores Estáticos de PotenciaDocument8 pagesControl de Convertidores Estáticos de PotenciaDanielAlejandroRamosQueroNo ratings yet
- Tarea 5 - Control Eléctrico Con Detector de Presencia y Célula Fotoeléctrica OkDocument16 pagesTarea 5 - Control Eléctrico Con Detector de Presencia y Célula Fotoeléctrica OkMario HuamaniNo ratings yet
- Antena para Reducir InterferenciasDocument4 pagesAntena para Reducir InterferenciasJoséNo ratings yet
- Primer Piso Segundo - Cuarto Piso: L E Y E N D ADocument1 pagePrimer Piso Segundo - Cuarto Piso: L E Y E N D Arenato miguel apaza apaza roblesNo ratings yet
- Tarea 1 - Fundamentos de Electrónica BásicaDocument4 pagesTarea 1 - Fundamentos de Electrónica BásicaLedherzon ContrerasNo ratings yet
- Conversor AC DC Rectificador Controlado.Document105 pagesConversor AC DC Rectificador Controlado.Maria TipantuñaNo ratings yet
- Cambio de TransformadorDocument19 pagesCambio de TransformadorDavid Omar Torres GutierrezNo ratings yet
- FT 18 Analisis y Comprobacion de Los Elementos Del Motor de ArranqueDocument15 pagesFT 18 Analisis y Comprobacion de Los Elementos Del Motor de Arranquejjossette3467No ratings yet
- AR-DO-003 Domótica - Actuadores Cristian Peñas GarcíaDocument5 pagesAR-DO-003 Domótica - Actuadores Cristian Peñas GarcíaShin PeñasNo ratings yet
- MicrófonosDocument8 pagesMicrófonosLeonel DagnerNo ratings yet