You might also like
- (Apostila) Robótica Industrial - FEUPEDocument101 pages(Apostila) Robótica Industrial - FEUPEEduardo BandeiraNo ratings yet
- ObjetivoDocument5 pagesObjetivoHigor Paiva TstNo ratings yet
- 06.02 - 2011 - Operação Guindalto - Rev.00Document7 pages06.02 - 2011 - Operação Guindalto - Rev.00Али АленкарNo ratings yet
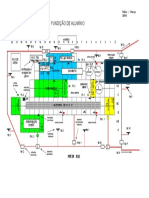
- 07 - Fundição de AlumínioDocument1 page07 - Fundição de AlumínioАли АленкарNo ratings yet
- 04-Manual Balancim Leve PDFDocument18 pages04-Manual Balancim Leve PDFFlavio FornazaroNo ratings yet
- Book RM08 2018 Web 1Document35 pagesBook RM08 2018 Web 1Али АленкарNo ratings yet
- RB ApostilaDocument95 pagesRB ApostilaLuiz Carlos VidalNo ratings yet
- NBR 12790 (1995) - Cilindro de Aço Especificado, Sem Costura, para Armazenagem E Transporte de Gase PDFDocument9 pagesNBR 12790 (1995) - Cilindro de Aço Especificado, Sem Costura, para Armazenagem E Transporte de Gase PDFАли АленкарNo ratings yet
- Apresentação EsocialDocument50 pagesApresentação EsocialАли АленкарNo ratings yet
- Aula5 Meio de Ligação de TubosDocument19 pagesAula5 Meio de Ligação de TubosАли АленкарNo ratings yet
- (Apostila) Robótica Industrial - FEUPEDocument101 pages(Apostila) Robótica Industrial - FEUPEEduardo BandeiraNo ratings yet
- 1slide de ImpressãoDocument39 pages1slide de ImpressãoАли АленкарNo ratings yet
- Analise de Risco - PinturaDocument5 pagesAnalise de Risco - PinturaАли АленкарNo ratings yet
- Sassmaq 202005Document101 pagesSassmaq 202005Mucciaccito100% (9)
- Slides - A Tutoria - Características e Finalidades PDFDocument12 pagesSlides - A Tutoria - Características e Finalidades PDFEdmilson Manoel CoelhoNo ratings yet
- Cap-28 AMUVIDocument9 pagesCap-28 AMUVIbombeiro_passosNo ratings yet
- NBR-Sintese Normas Abnt - Trabalhos Academicos PDFDocument12 pagesNBR-Sintese Normas Abnt - Trabalhos Academicos PDFhalanmeloNo ratings yet
- Código de Ética Profissional Do ContabilistaDocument6 pagesCódigo de Ética Profissional Do ContabilistaClaudia CarneiroNo ratings yet
- ESocial Mudanças e Soluções (PTDocument24 pagesESocial Mudanças e Soluções (PTАли АленкарNo ratings yet
- Anelore Tolardo Slides ESocial 1º DiaDocument38 pagesAnelore Tolardo Slides ESocial 1º DiaАли АленкарNo ratings yet
- ESocial CIESP 29-10-2013 Direitos LegaisDocument48 pagesESocial CIESP 29-10-2013 Direitos LegaisantoniopulligNo ratings yet
- Como Calcular Quantos Exaustores Eólico Vou PrecisarDocument2 pagesComo Calcular Quantos Exaustores Eólico Vou PrecisarАли Аленкар100% (1)
- Apr - Modelo Base - ConfidereDocument4 pagesApr - Modelo Base - ConfidereАли АленкарNo ratings yet
- Complexoautomotivo (19591) PDFDocument16 pagesComplexoautomotivo (19591) PDFDanielPereiraNo ratings yet
- Material 3 - EngenhariaAutomotiva Eng. MecânicaDocument8 pagesMaterial 3 - EngenhariaAutomotiva Eng. MecânicaАли АленкарNo ratings yet
- Pergunta Sobre Como Funciona Um Motor A CombustãoDocument1 pagePergunta Sobre Como Funciona Um Motor A CombustãoАли АленкарNo ratings yet
- Decreto Estadual #56819-2011 - 10mar2011Document43 pagesDecreto Estadual #56819-2011 - 10mar2011armandocesarNo ratings yet
- Motor Pistão Biela Virabrequim Cames Valvulas ColetorDocument38 pagesMotor Pistão Biela Virabrequim Cames Valvulas ColetorАли АленкарNo ratings yet
- Noções de MecânicaDocument10 pagesNoções de MecânicaAlvaro SouzaNo ratings yet
- Aula 0. IntroduçãoDocument9 pagesAula 0. IntroduçãoАли АленкарNo ratings yet
- Programa AVAC Maio2008Document3 pagesPrograma AVAC Maio2008Luis Miguel FerreiraNo ratings yet
- Apostila de MecanismosDocument66 pagesApostila de MecanismosPedro ViníciusNo ratings yet
- Recuperação 2 Lei de Newton PDFDocument9 pagesRecuperação 2 Lei de Newton PDFBëatrïz Nēvës FėrnåndësNo ratings yet
- Catalago Metalac PortuguesDocument52 pagesCatalago Metalac PortuguesVisconde JoséNo ratings yet
- Problemas Por Assunto-10-Colisoes PDFDocument14 pagesProblemas Por Assunto-10-Colisoes PDFCamilaNo ratings yet
- 5388 Assessoria Mapa - Teoria Das Estruturas II - 51 2024Document3 pages5388 Assessoria Mapa - Teoria Das Estruturas II - 51 2024daimonkonicz6No ratings yet
- Lista de SobressalentesDocument6 pagesLista de SobressalentesSebastião da CruzNo ratings yet
- Apostila RM Porto - Caps 9-16Document78 pagesApostila RM Porto - Caps 9-16Allan VictorNo ratings yet
- Trabalho Sistemas Termicos 1Document6 pagesTrabalho Sistemas Termicos 1Jhonata ChimeloNo ratings yet
- 02 - Conceitos Basicos Analise de TensõesDocument36 pages02 - Conceitos Basicos Analise de Tensõescraveira99No ratings yet
- New Holland E215LC - MEDocument20 pagesNew Holland E215LC - MEUmberti Boff KolingNo ratings yet
- DEP+-+Mecânica+Geral+-+Lista+4+de+exercíciosDocument7 pagesDEP+-+Mecânica+Geral+-+Lista+4+de+exercíciosPapelaria Nova Vida Ltda MENo ratings yet
- Relatorio de Estagio-WhalysonDocument27 pagesRelatorio de Estagio-WhalysonWhalyson PaivaNo ratings yet
- Baldan Folheto RP Rpu WvZENsDocument2 pagesBaldan Folheto RP Rpu WvZENsPARECIS PECASNo ratings yet
- Fenomenos Transporte - LivDocument210 pagesFenomenos Transporte - LivAlimentumNo ratings yet
- SD70 ACeDocument20 pagesSD70 ACeluxo01100% (2)
- Instrumentacaobasica2 PDFDocument242 pagesInstrumentacaobasica2 PDFSergio Gomes Ferreira100% (5)
- Dimensionamento Gancho IçamentoDocument10 pagesDimensionamento Gancho IçamentoArtur JardimNo ratings yet
- OscilacaoDocument6 pagesOscilacaoDivaneide RodriguesNo ratings yet
- Q 2 Prova FT7PEE - ERE - 011220.docx - Documentos GoogleDocument1 pageQ 2 Prova FT7PEE - ERE - 011220.docx - Documentos GoogleAlisson Magalhaes Silva SilvaNo ratings yet
- IST - Juntas EstruturaisDocument122 pagesIST - Juntas EstruturaisSergio AlmeidaNo ratings yet
- Prova de FísicaDocument2 pagesProva de FísicaTabNo ratings yet
- Análise Dimensional e Semelhança - FT1Document17 pagesAnálise Dimensional e Semelhança - FT1Damdev SoftwareNo ratings yet
- Torque de FlangesDocument72 pagesTorque de FlangesAndré Luis Bighi93% (15)
- Senai-BA - Rodas e PneusDocument61 pagesSenai-BA - Rodas e PneusDiêgo Marcos50% (2)
- CAI1 A05 Apr - Medição de Vazão - Parte ADocument26 pagesCAI1 A05 Apr - Medição de Vazão - Parte AMatheus Aller MartinsNo ratings yet
- Caminhoes para Longas Distancias Especificacoes Tecnicas r400 PDFDocument8 pagesCaminhoes para Longas Distancias Especificacoes Tecnicas r400 PDFLeon FelipeNo ratings yet
- Lista Exercicios 1.2023Document2 pagesLista Exercicios 1.2023By RaquelNo ratings yet
- Lista de Exercícios 2 - GabaritoDocument5 pagesLista de Exercícios 2 - GabaritoBruno CoelhoNo ratings yet
- Aula 04Document41 pagesAula 04Amanda MacielNo ratings yet