You might also like
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (121)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (588)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (400)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (895)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
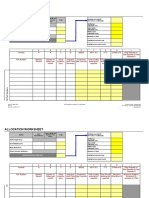
- Cost BreakdownDocument241 pagesCost Breakdownbilisuma sebokaNo ratings yet
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- 496 - SSP481 - Audi A7 Onboard Power Supply and Networking PDFDocument40 pages496 - SSP481 - Audi A7 Onboard Power Supply and Networking PDFbenjaminhuku100% (5)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (73)
- Roofing SafetyDocument38 pagesRoofing SafetyDhârâñî KûmârNo ratings yet
- Supplier Run Rate CalculatorDocument9 pagesSupplier Run Rate CalculatordcevipinNo ratings yet
- Astm B446 - 2003 - 2008Document5 pagesAstm B446 - 2003 - 2008isaque300984No ratings yet
- SAES-A-102 Ambient Air Quality and Source Emissions StandardsDocument21 pagesSAES-A-102 Ambient Air Quality and Source Emissions StandardsFlorante NoblezaNo ratings yet
- 000-Za-E-M09403 - C-MS For Cable Tray InstallationDocument15 pages000-Za-E-M09403 - C-MS For Cable Tray Installationsyam prasad100% (1)
- Centum VPDocument101 pagesCentum VPgopalNo ratings yet
- Fema 154 FormsDocument3 pagesFema 154 FormslesgiuNo ratings yet
- Arduino AssignmentDocument2 pagesArduino AssignmentThiaga RajanNo ratings yet
- Vishwa ECI 2017 PDFDocument2 pagesVishwa ECI 2017 PDFViswam PalakondaNo ratings yet
- Certified Peer Review Course Syllabus - 1Document2 pagesCertified Peer Review Course Syllabus - 1Thiaga RajanNo ratings yet
- Membership Form: Press Club of IndiaDocument2 pagesMembership Form: Press Club of IndiaThiaga Rajan100% (1)
- College Profile: in Association With IEEE Power Electronics Society (PELS) Madras SectionDocument2 pagesCollege Profile: in Association With IEEE Power Electronics Society (PELS) Madras SectionThiaga RajanNo ratings yet
- Power Electronics Expected MCQ PDF 1 For Coal India Limited (CIL) MT Exam 2017Document12 pagesPower Electronics Expected MCQ PDF 1 For Coal India Limited (CIL) MT Exam 2017Nandakumar ReddyNo ratings yet
- Objective Faculty: Kongu Engineering College (Autonomous)Document2 pagesObjective Faculty: Kongu Engineering College (Autonomous)Thiaga RajanNo ratings yet
- List of Research Funding AgencyDocument3 pagesList of Research Funding AgencyThiaga RajanNo ratings yet
- 24 - 01 - 2016 - General - Tamil - ANSWER KEYDocument26 pages24 - 01 - 2016 - General - Tamil - ANSWER KEYsasNo ratings yet
- 24 - 01 - 2016 - General - Tamil - ANSWER KEYDocument26 pages24 - 01 - 2016 - General - Tamil - ANSWER KEYsasNo ratings yet
- Energies 06 03841 PDFDocument18 pagesEnergies 06 03841 PDFThiaga RajanNo ratings yet
- Electrical Engineering: Memory Based Qeustions and Answer 23 January 2018 (Morning)Document6 pagesElectrical Engineering: Memory Based Qeustions and Answer 23 January 2018 (Morning)Thiaga RajanNo ratings yet
- TNPSC Group 2 Study Material TamilDocument12 pagesTNPSC Group 2 Study Material TamilThiaga RajanNo ratings yet
- 1 TNPSC 6th Science Study Material PDFDocument7 pages1 TNPSC 6th Science Study Material PDFThiaga RajanNo ratings yet
- All India Council For Technical Education: AICTE Quality Improvement Scheme (AQIS) 2021-22 Financial SupportDocument2 pagesAll India Council For Technical Education: AICTE Quality Improvement Scheme (AQIS) 2021-22 Financial Supportviju001No ratings yet
- For Use by Headquarters (Programme Code) :: (Strike Out Which Are Not Applicable)Document1 pageFor Use by Headquarters (Programme Code) :: (Strike Out Which Are Not Applicable)Thiaga RajanNo ratings yet
- MyecertificateDocument1 pageMyecertificateThiaga RajanNo ratings yet
- TNPSC GR-2, GR-4 - Tamil Mini Materials by Sriram Coaching CentreDocument55 pagesTNPSC GR-2, GR-4 - Tamil Mini Materials by Sriram Coaching CentreThiaga Rajan100% (1)
- Myecertificate PDFDocument1 pageMyecertificate PDFThiaga RajanNo ratings yet
- Exam Cell Slot For Kavitha PDFDocument1 pageExam Cell Slot For Kavitha PDFThiaga RajanNo ratings yet
- Course File FormatDocument3 pagesCourse File FormatThiaga RajanNo ratings yet
- Engineering PDFDocument25 pagesEngineering PDFSouparna BanerjeeNo ratings yet
- MBA First Year Syllabus-151013Document11 pagesMBA First Year Syllabus-151013Anonymous fFsGiyNo ratings yet
- Course File FormatDocument3 pagesCourse File FormatThiaga RajanNo ratings yet
- Guidebook Engi Div Tech ActivitiesDocument102 pagesGuidebook Engi Div Tech ActivitiesBharath B M GowdaNo ratings yet
- MBA General Second Year-151013Document1 pageMBA General Second Year-151013Thiaga RajanNo ratings yet
- NIRF CIRCULAR Published - 07-02-2020Document1 pageNIRF CIRCULAR Published - 07-02-2020Thiaga RajanNo ratings yet
- Anand KumarDocument6 pagesAnand KumarThiaga RajanNo ratings yet
- The Institution of Engineers (India) : General Guidelines For Engineering CollegesDocument15 pagesThe Institution of Engineers (India) : General Guidelines For Engineering CollegesSanjan KSNo ratings yet
- MBA General Second Year-151013Document1 pageMBA General Second Year-151013Thiaga RajanNo ratings yet
- 115 Test Out Study GuideFeb2017Document16 pages115 Test Out Study GuideFeb2017Ashish MalikNo ratings yet
- ABSORPTION AND SP GRAVITY fine agg. QC 467,468- 19-11-2020 العلمين PDFDocument1 pageABSORPTION AND SP GRAVITY fine agg. QC 467,468- 19-11-2020 العلمين PDFjajajajNo ratings yet
- Analysis Procedure K2co3 PDFDocument3 pagesAnalysis Procedure K2co3 PDFPiyush PatelNo ratings yet
- NEMA Premium CatalogDocument38 pagesNEMA Premium CatalogPedro SanchezNo ratings yet
- Tps 53014Document27 pagesTps 53014nebiyu mulugetaNo ratings yet
- SVC Manual C2670 EngDocument146 pagesSVC Manual C2670 EngAnonymous 1lbWGmNo ratings yet
- Final ProjectDocument4 pagesFinal Projectsajad soleymanzadeNo ratings yet
- Polylux WebkatalogDocument96 pagesPolylux WebkatalogNesil Abiera50% (2)
- Seafrost BD50F Refrigerator SystemDocument7 pagesSeafrost BD50F Refrigerator SystemMathiyazhagan SNo ratings yet
- Foaming of Friction Stir Processed Al /mgco3 Precursor Via Ame HeatingDocument27 pagesFoaming of Friction Stir Processed Al /mgco3 Precursor Via Ame HeatingArshad SiddiqueeNo ratings yet
- Upload Photosimages Into Custom Table & Print in Adobe FormDocument14 pagesUpload Photosimages Into Custom Table & Print in Adobe FormEmilSNo ratings yet
- A Business Intelligence Framework For The FutureDocument10 pagesA Business Intelligence Framework For The Futuremcalbala100% (1)
- Weld Fitting Flange Astm SpecsDocument1 pageWeld Fitting Flange Astm SpecsAZU-OKPONo ratings yet
- SM 121 PDFDocument573 pagesSM 121 PDFEnrique Arevalo LeyvaNo ratings yet
- Reason Key CommandsDocument6 pagesReason Key CommandsVijay KumarNo ratings yet
- Assign 3Document9 pagesAssign 3Yudha PP0% (1)
- AAAC Guideline For Apartment and Townhouse Acoustic Rating 2010Document10 pagesAAAC Guideline For Apartment and Townhouse Acoustic Rating 2010Benjamín AlainNo ratings yet
- Li-Fi Industries Communication Using Laser Media in Open SpaceDocument61 pagesLi-Fi Industries Communication Using Laser Media in Open SpaceVinothKumar100% (1)
- Safety Is Your Top Priority: Explosion-Proof LED LightingDocument62 pagesSafety Is Your Top Priority: Explosion-Proof LED LightingPhi LongNo ratings yet
- NEOCLASSICAL CITY PlanningDocument10 pagesNEOCLASSICAL CITY PlanningAfrahNo ratings yet
- Risk Assess T-17 - Using Portable Hand ToolsDocument4 pagesRisk Assess T-17 - Using Portable Hand ToolsMAB AliNo ratings yet