You might also like
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- 10A Dr. T. Kozai Plant Factory APO 20160630 PDFDocument65 pages10A Dr. T. Kozai Plant Factory APO 20160630 PDFDavaatseren NarmandakhNo ratings yet
- 5C Dr. Jenn Kan Lu (Aaquacutlure 4.0 & Tranceabilty Taiwan V8 6-28-2016) PDFDocument62 pages5C Dr. Jenn Kan Lu (Aaquacutlure 4.0 & Tranceabilty Taiwan V8 6-28-2016) PDFDavaatseren NarmandakhNo ratings yet
- 3B Dr. T. Okayasu ICT Application For Typical Small - and Medium-Scale Farmers in Japan Agriculture PDFDocument48 pages3B Dr. T. Okayasu ICT Application For Typical Small - and Medium-Scale Farmers in Japan Agriculture PDFDavaatseren NarmandakhNo ratings yet
- 6B Mr. Steven Chiang 20160620 PDFDocument25 pages6B Mr. Steven Chiang 20160620 PDFDavaatseren NarmandakhNo ratings yet
- 5A Dr. Qu Liang Nuclear Application in Production PDFDocument23 pages5A Dr. Qu Liang Nuclear Application in Production PDFDavaatseren NarmandakhNo ratings yet
- 5C Dr. Jenn Kan Lu (Aquaculture 4.0 & Seafood Traceability in Taiwan) Summary V3 6-2016 PDFDocument3 pages5C Dr. Jenn Kan Lu (Aquaculture 4.0 & Seafood Traceability in Taiwan) Summary V3 6-2016 PDFDavaatseren Narmandakh100% (1)
- 4A Dr. Y. Mori 160607 - Mebiol APO Presentation PDFDocument46 pages4A Dr. Y. Mori 160607 - Mebiol APO Presentation PDFDavaatseren NarmandakhNo ratings yet
- 5B Mr. Chan Seng Kit (Abstract) PDFDocument1 page5B Mr. Chan Seng Kit (Abstract) PDFDavaatseren NarmandakhNo ratings yet
- 5B Mr. Chan Seng Kit The Next Strategy in The Adaptation of GAP - APO PDFDocument23 pages5B Mr. Chan Seng Kit The Next Strategy in The Adaptation of GAP - APO PDFDavaatseren NarmandakhNo ratings yet
- 6A Dr. O. Saito (ENG) Food Value Chain and Development of Agr and Food Industry PDFDocument30 pages6A Dr. O. Saito (ENG) Food Value Chain and Development of Agr and Food Industry PDFDavaatseren NarmandakhNo ratings yet
- 2B Prof. Daniel Berckmans PDFDocument73 pages2B Prof. Daniel Berckmans PDFDavaatseren NarmandakhNo ratings yet
- 1A Dr. S. Ito APO Presentation June28'16 PDFDocument54 pages1A Dr. S. Ito APO Presentation June28'16 PDFDavaatseren NarmandakhNo ratings yet
- 2A Dr. S. Shibusawa APO20160628 PDFDocument36 pages2A Dr. S. Shibusawa APO20160628 PDFDavaatseren NarmandakhNo ratings yet
- 3B Dr. T. Okayasu (Summary) PDFDocument1 page3B Dr. T. Okayasu (Summary) PDFDavaatseren NarmandakhNo ratings yet
- 2B Prof. Daniel Berckmans (Paper) APO - ValueCreationThroughPrecisionLivestockFarmingSystems - Paper PDFDocument13 pages2B Prof. Daniel Berckmans (Paper) APO - ValueCreationThroughPrecisionLivestockFarmingSystems - Paper PDFDavaatseren NarmandakhNo ratings yet
- 1A Dr. F. Saito & Dr. Ito (ENG) PDFDocument25 pages1A Dr. F. Saito & Dr. Ito (ENG) PDFDavaatseren NarmandakhNo ratings yet
- 1A Dr. F. Saito & Dr. Ito (ENG) PDFDocument25 pages1A Dr. F. Saito & Dr. Ito (ENG) PDFDavaatseren NarmandakhNo ratings yet
- 2B Prof. Daniel Berckmans (Summary) PDFDocument3 pages2B Prof. Daniel Berckmans (Summary) PDFDavaatseren NarmandakhNo ratings yet
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (890)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (587)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (399)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (73)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (265)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2219)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (119)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- Ievs 103Document17 pagesIevs 103Ebadur Rahman BarbhuiyaNo ratings yet
- Parwan Irrigation SchedulingDocument23 pagesParwan Irrigation Schedulingayan UsmaniNo ratings yet
- Sources of Technical Inefficiency of Smallholder Farmers in Sorghum Production in Konso District, Southern EthiopiaDocument17 pagesSources of Technical Inefficiency of Smallholder Farmers in Sorghum Production in Konso District, Southern EthiopiaPremier PublishersNo ratings yet
- Niagara Agriculture Profile Dec 2022Document34 pagesNiagara Agriculture Profile Dec 2022samsinghania54321No ratings yet
- Alluvial Soil: Fertile Deposits from Flood PlainsDocument4 pagesAlluvial Soil: Fertile Deposits from Flood Plainshashim malikNo ratings yet
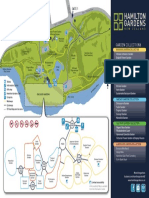
- Hamilton Gardens Map Download June2019Document1 pageHamilton Gardens Map Download June2019Sun WeaNo ratings yet
- Agri-TA Working Group - Brief - v1Document6 pagesAgri-TA Working Group - Brief - v1digvijay.deoNo ratings yet
- Assignment: University of Dhaka Department of Public AdministrationDocument7 pagesAssignment: University of Dhaka Department of Public AdministrationPollob Rana ParvesNo ratings yet
- How To Grow and Care Lychee PlantDocument14 pagesHow To Grow and Care Lychee PlantUsman AliNo ratings yet
- Report For Sec DarDocument4 pagesReport For Sec DarBernard James TandangNo ratings yet
- Travisnelson2 HW 320 Unit 9 AssignmentDocument36 pagesTravisnelson2 HW 320 Unit 9 Assignmentapi-626410065No ratings yet
- Backyard Cattle Fattening PDFDocument5 pagesBackyard Cattle Fattening PDFPassmore DubeNo ratings yet
- Agricultural & Fishery Products Market Information Reporting SystemDocument27 pagesAgricultural & Fishery Products Market Information Reporting SystemTed ChaoNo ratings yet
- Fukoka-Bonfils MethodDocument1 pageFukoka-Bonfils MethodsegrtNo ratings yet
- Co-Application of Neem-Based Biochar With Poultry Manure On CucumberDocument7 pagesCo-Application of Neem-Based Biochar With Poultry Manure On CucumberEmmanuel Bassey EffaNo ratings yet
- Wet Coffee Processing Industry Startup in EthiopiaDocument33 pagesWet Coffee Processing Industry Startup in EthiopiaHabtamu Wondyifraw100% (6)
- Gamma Rice StudyDocument1 pageGamma Rice StudyNurul Nadia JaafarNo ratings yet
- Jacklin Seed Guide 2023-2024 - JPG - 2023 - v5 - 2Document18 pagesJacklin Seed Guide 2023-2024 - JPG - 2023 - v5 - 2tnaillNo ratings yet
- Chapter 3 Quiz - Basic Calculation, Plans and DrawingDocument6 pagesChapter 3 Quiz - Basic Calculation, Plans and DrawingRaymart EstavilloNo ratings yet
- Porbandar CustomersDocument10 pagesPorbandar CustomersPARVEEN KUMAR100% (1)
- No PDFPDFDocument602 pagesNo PDFPDFguru_oolala100% (1)
- ROBERT McCAA Paleodemography of The AmericasDocument22 pagesROBERT McCAA Paleodemography of The AmericasVíctor CondoriNo ratings yet
- Agrarian ReformDocument6 pagesAgrarian ReformiambopolsNo ratings yet
- 456 EROSION/Irrigation-InducedDocument8 pages456 EROSION/Irrigation-InducedSinisaSikiPolovinaNo ratings yet
- Roundup Powermax: Bag LabelDocument28 pagesRoundup Powermax: Bag LabelMinenhle ChristianNo ratings yet
- Fieldwork Segment Report IrmaDocument50 pagesFieldwork Segment Report Irmaabhijitmitra100% (2)
- Landscape Architecture & Green Architecture: Planning 1Document33 pagesLandscape Architecture & Green Architecture: Planning 1Arch. Jan EchiverriNo ratings yet
- Sagar Dam HerbsDocument9 pagesSagar Dam HerbsChintamani VeerrajuNo ratings yet
- Final Exam Sts4Document11 pagesFinal Exam Sts4christoper laurente100% (8)
- Tanzania Investment GuideDocument20 pagesTanzania Investment Guideo-consultNo ratings yet