You might also like
- Bowing Styles in Irish Fiddle Playing Vol 1 - David LythDocument58 pagesBowing Styles in Irish Fiddle Playing Vol 1 - David LythEmma Harry100% (1)
- E 170 Interactive Cockpit GuideDocument90 pagesE 170 Interactive Cockpit Guideaivanov3100% (14)
- Van's Aircraft RV-12 Pilot's Operating Handbook Rev5Document80 pagesVan's Aircraft RV-12 Pilot's Operating Handbook Rev5Geoff MohrNo ratings yet
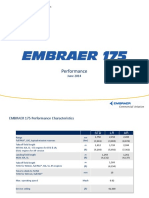
- E175 PerformanceDocument3 pagesE175 PerformanceMyo Myint AungNo ratings yet
- (Airplane Design) Jan Roskam - Airplane Design Part V - Component Weight Estimation. 5-DARcorporation (2018)Document227 pages(Airplane Design) Jan Roskam - Airplane Design Part V - Component Weight Estimation. 5-DARcorporation (2018)Daniel Lobato Bernardes100% (1)
- A Summary of Airline Weather Radar OperaDocument25 pagesA Summary of Airline Weather Radar OperaAirbus330 Airbus330No ratings yet
- Weather CardDocument2 pagesWeather Cardmekstone100% (1)
- TCAS II ChangesDocument4 pagesTCAS II Changesjunmech-1No ratings yet
- A320X Parking StandsDocument5 pagesA320X Parking StandsNirgunaRamkissoonNo ratings yet
- Erj Qrh-3708-204-Rev04-FullDocument258 pagesErj Qrh-3708-204-Rev04-Fullaivanov3No ratings yet
- Weather Radar TestDocument7 pagesWeather Radar TestnaziaNo ratings yet
- Erj 195 Pilot QRH Rev3Document33 pagesErj 195 Pilot QRH Rev3aivanov3No ratings yet
- Business Analyst Interview QuestionsDocument49 pagesBusiness Analyst Interview Questionsmital patel100% (4)
- Ebbr 22-2020Document139 pagesEbbr 22-2020Tweed3ANo ratings yet
- JAR Std3a PDFDocument82 pagesJAR Std3a PDFRealyn LabaynaNo ratings yet
- NAV4Document62 pagesNAV4Dimo GrigorovNo ratings yet
- 2000 - Wet - Contaminated Runway Data PDFDocument18 pages2000 - Wet - Contaminated Runway Data PDFEduardo Raulino100% (1)
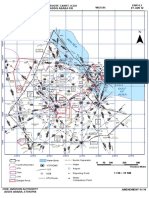
- Ethiopia Enroute Chart with Addis Ababa FIR boundariesDocument1 pageEthiopia Enroute Chart with Addis Ababa FIR boundarieskemoam birhanuNo ratings yet
- Rnav ApproachesDocument8 pagesRnav ApproachesMikeNo ratings yet
- Shannon Control GuideDocument9 pagesShannon Control GuideAnonymous CmnGxnUNo ratings yet
- Bae Briefing Checklist: MiscellaneousDocument2 pagesBae Briefing Checklist: Miscellaneousali4957270No ratings yet
- Welcome To Saudia B777 Aircraft Training: Sva Ac TRNGDocument18 pagesWelcome To Saudia B777 Aircraft Training: Sva Ac TRNGKaran KaranNo ratings yet
- Pilot's GuideDocument410 pagesPilot's GuideTuấn Vũ AnhNo ratings yet
- TAE ATPL Integrated Course 4Document11 pagesTAE ATPL Integrated Course 4FELLONo ratings yet
- Intro To FlightDocument17 pagesIntro To FlightanthonyNo ratings yet
- Mercedes-Benz E-Class Operator's Manual 1998Document164 pagesMercedes-Benz E-Class Operator's Manual 1998aivanov3100% (1)
- Operational flight plan checklistDocument13 pagesOperational flight plan checklistNicolasNo ratings yet
- Ac 05002 Amo Manual Caav A2009Document48 pagesAc 05002 Amo Manual Caav A2009Thanh Hao LuongNo ratings yet
- AIP Malaysia abbreviationsDocument13 pagesAIP Malaysia abbreviationsZachary Chew100% (1)
- C172R (NAVIII GFC700) Information Manual Revision 2 GARMIN1000Document416 pagesC172R (NAVIII GFC700) Information Manual Revision 2 GARMIN1000Ethan PoonNo ratings yet
- Crisis Management PlanDocument8 pagesCrisis Management PlanNfareeNo ratings yet
- Egcc PDFDocument59 pagesEgcc PDFNachoNo ratings yet
- Cisco CCNA SecurityDocument85 pagesCisco CCNA SecurityPaoPound HomnualNo ratings yet
- Fuel Planning & ManagementDocument10 pagesFuel Planning & Managementchhetribharat08No ratings yet
- Diffusion of InnovationDocument40 pagesDiffusion of Innovationlali62No ratings yet
- Atm QuestionsDocument23 pagesAtm QuestionsAziz YoussoufouNo ratings yet
- Obstacle Restriction and RemovalDocument34 pagesObstacle Restriction and Removalpangolin_79No ratings yet
- European Airport Take-Off Data TablesDocument215 pagesEuropean Airport Take-Off Data TablesLuis OrtizNo ratings yet
- Manchester, Uk Egcc/Man: 1.1. Atis 1. GeneralDocument45 pagesManchester, Uk Egcc/Man: 1.1. Atis 1. GeneralTweed3ANo ratings yet
- RNAV' Approach Charts Renamed RNP'Document2 pagesRNAV' Approach Charts Renamed RNP'ironI666No ratings yet
- Weight & Balance: Flight Operations Engineering CourseDocument28 pagesWeight & Balance: Flight Operations Engineering Courseoswaldo venegasNo ratings yet
- Milas, Turkey Ltfe/Bjv: 1.1. Atis 1.2. Preferential Rwy System Operations 1. GeneralDocument26 pagesMilas, Turkey Ltfe/Bjv: 1.1. Atis 1.2. Preferential Rwy System Operations 1. GeneralTweed3ANo ratings yet
- JAA Updates JAR-OPS 1 Commercial Air Transportation RulesDocument6 pagesJAA Updates JAR-OPS 1 Commercial Air Transportation RulesahfohNo ratings yet
- Cao 20.7.1BDocument16 pagesCao 20.7.1BChris BarryNo ratings yet
- EGKK ChartsDocument57 pagesEGKK ChartsraquelNo ratings yet
- Honeywell A320 FMS Pilot's Guide RevisionDocument541 pagesHoneywell A320 FMS Pilot's Guide RevisionShimeonNo ratings yet
- Part 8 OperationsDocument229 pagesPart 8 OperationsKINGDOEMSELYNo ratings yet
- Airline Transport Pilot License Exam SyllabusDocument74 pagesAirline Transport Pilot License Exam SyllabusAjay50% (2)
- CAAP 178-1 Non-Precision Approach GuidanceDocument20 pagesCAAP 178-1 Non-Precision Approach GuidanceRajiv RimalNo ratings yet
- Fly Jet MD-90: Guide to Flying the McDonnell Douglas TwinjetDocument10 pagesFly Jet MD-90: Guide to Flying the McDonnell Douglas TwinjetCharles SingerNo ratings yet
- AIP Somali Part One (1) En-RouteDocument80 pagesAIP Somali Part One (1) En-RouteabdirahmanNo ratings yet
- Airplane Equipment and Furnishings ManualDocument56 pagesAirplane Equipment and Furnishings ManualDVSNo ratings yet
- SNOWTAM DECODER Logbook SoftwareDocument2 pagesSNOWTAM DECODER Logbook SoftwareflotterotterNo ratings yet
- AIP Cabo VerdeDocument2 pagesAIP Cabo VerdeLestatGeb0% (1)
- OFP Flight Plan DetailsDocument19 pagesOFP Flight Plan DetailsoussamaborjNo ratings yet
- India Helicopter FOMDocument28 pagesIndia Helicopter FOMRaviNo ratings yet
- Wizz Feedback en-USDocument3 pagesWizz Feedback en-USjeandumarcheaviationNo ratings yet
- Implementation of Reduced Vertical Separation Minimum (RVSM) Between FL 290 and FL 410 Within European AirspaceDocument3 pagesImplementation of Reduced Vertical Separation Minimum (RVSM) Between FL 290 and FL 410 Within European AirspaceRepartoNo ratings yet
- Oprn (Benazir Bhutto Intl) - R (05feb16) PDFDocument17 pagesOprn (Benazir Bhutto Intl) - R (05feb16) PDFnabatmanNo ratings yet
- Jeppview For Windows: List of Pages in This Trip KitDocument39 pagesJeppview For Windows: List of Pages in This Trip KitPIETRONo ratings yet
- LowiDocument25 pagesLowiRobert Brown100% (1)
- DTNHDocument16 pagesDTNHSkoltzAllaniNo ratings yet
- Omdb/Dxb Dubai, Uae: Darax 1T Bubin 3TDocument25 pagesOmdb/Dxb Dubai, Uae: Darax 1T Bubin 3TMohannad AlamayrehNo ratings yet
- A330 Rnav Gps ApproachDocument9 pagesA330 Rnav Gps ApproachHani BoudiafNo ratings yet
- EDLWDocument11 pagesEDLWVST88No ratings yet
- FPL Brochure (2019!06!14 Final)Document2 pagesFPL Brochure (2019!06!14 Final)Sofia ForeroNo ratings yet
- Boeing 727-200FDocument1 pageBoeing 727-200FSergio GoncalvesNo ratings yet
- CB2 - Crewbrefing ManualDocument71 pagesCB2 - Crewbrefing ManualVincent GrondinNo ratings yet
- C-17A Afghan FullDocument28 pagesC-17A Afghan Fullaivanov3No ratings yet
- Curtiss C-46 CommandoDocument6 pagesCurtiss C-46 CommandoAviation/Space History Library100% (1)
- Target Strength: How Objects Reflect Sound in WaterDocument46 pagesTarget Strength: How Objects Reflect Sound in Wateraivanov3No ratings yet
- 06Document5 pages06aivanov3No ratings yet
- 2007 Output Stops RemovedDocument45 pages2007 Output Stops RemovedAisyah DzulqaidahNo ratings yet
- Look at The Picture Carefully. Rearrange The Words To Form Correct SentencesDocument6 pagesLook at The Picture Carefully. Rearrange The Words To Form Correct SentencesAdy PutraNo ratings yet
- Dekut Teaching Practice ManualDocument20 pagesDekut Teaching Practice Manualstephen njorogeNo ratings yet
- Eye Comfort Testing by TUeV Rheinland PDFDocument11 pagesEye Comfort Testing by TUeV Rheinland PDFevangelos!No ratings yet
- I2C Bus ManualDocument51 pagesI2C Bus Manualapi-26349602100% (6)
- Online School Management System Integrated With Accounting Management SystemDocument24 pagesOnline School Management System Integrated With Accounting Management SystemKIRUTHIKA SNo ratings yet
- Edison LearningDocument62 pagesEdison LearningYork Daily Record/Sunday NewsNo ratings yet
- Solids Flow Feeder Equipment for Precise Measurement & ControlDocument7 pagesSolids Flow Feeder Equipment for Precise Measurement & ControlAbhishek DuttaNo ratings yet
- Week 6: Practice Challenge 1 - Charts: InstructionsDocument7 pagesWeek 6: Practice Challenge 1 - Charts: InstructionskiranNo ratings yet
- Occupant Manikin Introduction: 95th Percentile Male Driver ModelDocument9 pagesOccupant Manikin Introduction: 95th Percentile Male Driver ModelarstjunkNo ratings yet
- EZSkin v3 User GuideDocument16 pagesEZSkin v3 User GuidePg1978No ratings yet
- Konica Bizhub 7272 - User ManualDocument436 pagesKonica Bizhub 7272 - User Manualfaco1723No ratings yet
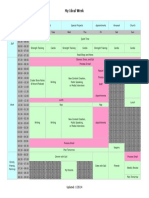
- My Ideal Week PDFDocument1 pageMy Ideal Week PDFAnonymous QE45TVC9e3No ratings yet
- Tomtom Device ForensicsDocument5 pagesTomtom Device ForensicsSwaroop WaghadeNo ratings yet
- Course Overview CSC 1707 Maths For ComputingDocument16 pagesCourse Overview CSC 1707 Maths For ComputingSarah JNo ratings yet
- The Device Is Running PDFDocument22 pagesThe Device Is Running PDFBint MustaphaNo ratings yet
- Sabri Toyyab Resume Spring 2019Document2 pagesSabri Toyyab Resume Spring 2019api-457400663No ratings yet
- Managing Information for Better DecisionsDocument12 pagesManaging Information for Better DecisionsTosin WilliamsNo ratings yet
- Ludwig Von Bertalanffy-General System Theory-Braziller (1968) PDFDocument153 pagesLudwig Von Bertalanffy-General System Theory-Braziller (1968) PDFM_Eddie0% (1)
- ACEEE - Best Practices For Data Centres - Lessons LearnedDocument12 pagesACEEE - Best Practices For Data Centres - Lessons LearnedtonybudgeNo ratings yet
- SmartPlant Instrumentation installation checklistDocument2 pagesSmartPlant Instrumentation installation checklistmnoormohamed82No ratings yet
- Sustainable Energy and Resource ManagementDocument318 pagesSustainable Energy and Resource ManagementRajdeepSenNo ratings yet
- SKFDocument26 pagesSKFRahul ParikhNo ratings yet
- KSSR - MatematikDocument6 pagesKSSR - MatematikFaris FarhanNo ratings yet