You might also like
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (119)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (265)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (399)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (587)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2219)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (890)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Blaster's Handbook PDFDocument180 pagesBlaster's Handbook PDFsaiful100% (1)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (73)
- Lifetime Extension Steam TurbineDocument10 pagesLifetime Extension Steam Turbineramakantinamdar100% (1)
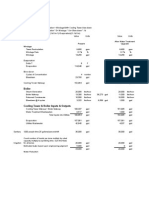
- Design Calc - Cooling Tower Sizing - R1 - 15.10.2011Document1 pageDesign Calc - Cooling Tower Sizing - R1 - 15.10.2011AliAliNo ratings yet
- Design Calc - Cooling Tower Sizing - R1 - 15.10.2011Document1 pageDesign Calc - Cooling Tower Sizing - R1 - 15.10.2011AliAliNo ratings yet
- Impact of Gadgets on Learning in Senior High StudentsDocument16 pagesImpact of Gadgets on Learning in Senior High StudentsBlessing Joy Capiz83% (36)
- De ShawDocument10 pagesDe ShawNishant GuptaNo ratings yet
- (Developments in Geotechnical Engineering 75) Sven Hansbo (Eds.) - Foundation Engineering-Academic Press, Elsevier (1994) PDFDocument534 pages(Developments in Geotechnical Engineering 75) Sven Hansbo (Eds.) - Foundation Engineering-Academic Press, Elsevier (1994) PDFপ্রিয়দীপ প্রিয়মNo ratings yet
- Smart Polymers and Their Applications As Biomaterials: M.R.Aguilar, C. Elvira, A. Gallardo, B. Vázquez, and J.S. RománDocument27 pagesSmart Polymers and Their Applications As Biomaterials: M.R.Aguilar, C. Elvira, A. Gallardo, B. Vázquez, and J.S. RománAbdul HakimNo ratings yet
- Synchronization of GeneratorsDocument3 pagesSynchronization of Generatorsneo_nitinNo ratings yet
- Water Treatment - Overview Ion ExchangeDocument9 pagesWater Treatment - Overview Ion ExchangeAliAliNo ratings yet
- Water Treatment - Overview Ion ExchangeDocument9 pagesWater Treatment - Overview Ion ExchangeAliAliNo ratings yet
- Mangina2001 PDFDocument6 pagesMangina2001 PDFAliAliNo ratings yet
- Immunoassay For Estrogens in The Environment: Multi-Analyte - Detektion Based On FluorescenceDocument1 pageImmunoassay For Estrogens in The Environment: Multi-Analyte - Detektion Based On FluorescenceAliAliNo ratings yet
- Mangina2001 PDFDocument6 pagesMangina2001 PDFAliAliNo ratings yet
- Anakon 2001Document1 pageAnakon 2001AliAliNo ratings yet
- Exercice 1 Peptide Mass Fingerprinting Exercise (Mass List)Document3 pagesExercice 1 Peptide Mass Fingerprinting Exercise (Mass List)AliAliNo ratings yet
- Front Matter1Document1 pageFront Matter1AliAliNo ratings yet
- Baronas Biosensors Perf Outer Membrane 2009Document18 pagesBaronas Biosensors Perf Outer Membrane 2009Don CameronNo ratings yet
- PrefaceDocument1 pagePrefaceAliAliNo ratings yet
- Baronas Biosensors Perf Outer Membrane 2009Document18 pagesBaronas Biosensors Perf Outer Membrane 2009Don CameronNo ratings yet
- WWW Radiometer-Analytical Com Voltalab en Tutorial Eis ASPDocument1 pageWWW Radiometer-Analytical Com Voltalab en Tutorial Eis ASPAliAliNo ratings yet
- Hysys Example 4Document3 pagesHysys Example 4Diego HenriqueNo ratings yet
- Preface About The Author: Wastes BODDocument6 pagesPreface About The Author: Wastes BODAliAliNo ratings yet
- Difficulties Due To BiofoulingDocument14 pagesDifficulties Due To BiofoulingAliAliNo ratings yet
- CalculationsDocument2 pagesCalculationsAliAliNo ratings yet
- Index: Index Terms Links ADocument11 pagesIndex: Index Terms Links AAliAliNo ratings yet
- FPSXL 2LDocument1 pageFPSXL 2LAliAliNo ratings yet
- In Our 2009-2010 Project, We Have Successfully Developed A Novel Method Which Combines ImmunomagneticDocument2 pagesIn Our 2009-2010 Project, We Have Successfully Developed A Novel Method Which Combines ImmunomagneticAliAliNo ratings yet
- Biocidal Methods and Compositions For Recirculating Water SystemsDocument41 pagesBiocidal Methods and Compositions For Recirculating Water SystemsAliAliNo ratings yet
- CalculationsDocument2 pagesCalculationsAliAliNo ratings yet
- FPSBa 8cDocument1 pageFPSBa 8cAliAliNo ratings yet
- FPSLowFine 20 - 40Document1 pageFPSLowFine 20 - 40AliAliNo ratings yet
- No FilesDocument1 pageNo FilesAliAliNo ratings yet
- CalculationsDocument2 pagesCalculationsAliAliNo ratings yet
- 17 ButaneDocument2 pages17 ButaneAliAliNo ratings yet
- Tobaco VaccDocument19 pagesTobaco VaccSisay KebebeNo ratings yet
- Manitou MI 50 D MI 100 D ENDocument12 pagesManitou MI 50 D MI 100 D ENllovarNo ratings yet
- Ansi/Ashrae/Ies Standard 90.1-2013 HVAC: Building Energy CodesDocument146 pagesAnsi/Ashrae/Ies Standard 90.1-2013 HVAC: Building Energy CodesLeong Ion ChunNo ratings yet
- Pilot Operated Safety Relief ValvesDocument6 pagesPilot Operated Safety Relief ValvesfabioNo ratings yet
- Commsys 2 2012 4Document47 pagesCommsys 2 2012 4AnuNo ratings yet
- Sae j419 1983 Methods of Measuring Decarburization PDFDocument8 pagesSae j419 1983 Methods of Measuring Decarburization PDFSumeet SainiNo ratings yet
- PNG382 FT en 11Document2 pagesPNG382 FT en 11Misu1983No ratings yet
- Turbo Machines and Propulsion Exam Questions on Pumps, Turbines, Pipe FlowDocument3 pagesTurbo Machines and Propulsion Exam Questions on Pumps, Turbines, Pipe FlowAdams100% (1)
- Romanian Power Grid Substation Refitting StrategyDocument16 pagesRomanian Power Grid Substation Refitting StrategyParmeshwar MbNo ratings yet
- 7 New Management ToolsDocument6 pages7 New Management ToolsKarthik SivaNo ratings yet
- Competency-Check-H e I ADocument20 pagesCompetency-Check-H e I Abaldo yellow4No ratings yet
- Aceros PoscoDocument35 pagesAceros PoscoregistrosegNo ratings yet
- Math TaskDocument2 pagesMath TaskAsher MananganNo ratings yet
- JCL LC SLIDES01 FP2005 Ver1.0Document51 pagesJCL LC SLIDES01 FP2005 Ver1.0api-27095622100% (2)
- N-Channel Low QG Mosfet 30V, 100A, 3.3m: MOS-TECH Semiconductor Co.,LTDDocument9 pagesN-Channel Low QG Mosfet 30V, 100A, 3.3m: MOS-TECH Semiconductor Co.,LTDAnonymous p1ig0zX6p0No ratings yet
- DF PDFDocument8 pagesDF PDFAtif JaveadNo ratings yet
- Debug 1214Document15 pagesDebug 1214manhlong2009No ratings yet
- Slope Stability Then and Now: Professor Emeritus, Virginia Tech, 1600 Carlson DR., Blacksburg, VA, 24060Document20 pagesSlope Stability Then and Now: Professor Emeritus, Virginia Tech, 1600 Carlson DR., Blacksburg, VA, 24060anarNo ratings yet
- Mastertop TC 458 PDFDocument3 pagesMastertop TC 458 PDFFrancois-No ratings yet
- Louie Langas Resume 2019Document1 pageLouie Langas Resume 2019Louie LangasNo ratings yet
- Car Brochure Hyundai Ioniq PX 929 RDocument13 pagesCar Brochure Hyundai Ioniq PX 929 RHalil KayaNo ratings yet
- Weigelt Experience With Stator End-Winding Vibrations Causes, Solutions and Monitoring EPRI 2011, AlbanyDocument53 pagesWeigelt Experience With Stator End-Winding Vibrations Causes, Solutions and Monitoring EPRI 2011, AlbanyKevin Luis Perez QuirozNo ratings yet
- Traffic Engineering Bachelor of Science in Civil EngineeringDocument22 pagesTraffic Engineering Bachelor of Science in Civil EngineeringDaisy AstijadaNo ratings yet
- RtosDocument78 pagesRtossekinNo ratings yet